前馈加反馈的转向控制对车辆操纵特性影响研究与仿真
2015-04-16徐丹,胡兵
徐 丹,胡 兵
(常州刘国钧高等职业技术学校,江苏 常州 213025)
目前,在汽车线控四轮转向系统的控制策略中,存在较多控制方式与控制律。从总体上看,由于存在结构简单、对传统转向结构有继承性以及控制方便等优点, 采用两转向轮整体调节的控制方式应用最多。其缺点是很难甚至无法获得车辆控制主体期望的稳态侧偏角为零[1]。本文采用“前馈+反馈”的控制方式对汽车前、后轮实现自由主动控制,并通过仿真分析该控制方式的优缺点。
1 控制模型与转向轮系统状态方程描述
汽车线控四轮转向系统是在四轮转向系统(4WS)的基础上,结合线控转向技术(SBW)发展起来的转向控制系统。该系统结合了两者优势,是当前汽车先进的转向控制系统,同时也是汽车转向控制系统的研究热点[2]。
设车辆左右对称,汽车转向轮系统可以简化为如图1所示的分析模型。
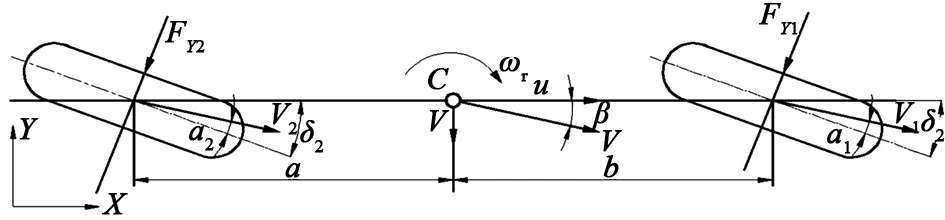
图1 汽车转向轮分析模型
模型中X为车辆前进方向,Y为车辆侧向方向;其参量意义分别为:FY1、FY2分别为地面作用于车轮的侧偏力;a1、a2分别为前轮、后轮侧偏角;δ1、δ2分别为前轮、后轮的转角;a、b分别为被控汽车前轴、后轴距质心距离;ωr为横摆角速度;β为质心侧偏角。由图1中的模型表达及牛顿第二定律,得到其运动方程为:
(1)
当被控汽车发生小转角时,有β≈υ/u,故有:cosβ≈1,cosδ1=cosδ2≈1。则式1可以进一步写成:
(2)
(3)

2 控制策略描述
在汽车线控四轮转向系统中通常采用典型的比例控制与动态补偿式控制方式,这2种控制方式均未考虑汽车在行驶状态下的非线性特性。为此,基于实际变化工况出发的人工神经网络控制、自适应控制和鲁棒控制等控制方式相继被提出,但存在可靠性方面的问题以及自身的不足,还未真正意义上应用于工程实际[3]。
本文采用的转向控制策略如下:对汽车前轮转向控制采用预设传动比方式,对汽车后轮采用前轮转角比例前馈加横摆角速度比例反馈实施控制,即“前馈+反馈”的控制策略。通过该控制方式,将质心侧偏角始终为零作为控制目标;同时利用反馈控制的优点,增强汽车在行驶状态下抵抗外界干扰的性能。
2.1 预设传动比的前轮转角控制
汽车转向系统的转向传动比是指汽车方向盘转角与被控对象的转向轮转角之比。线控四轮转向系统中传动比为非恒定值,由电控单元ECU根据任一时刻下被控对象转向盘转角与行驶速度等信息计算得到的瞬时值。其优点在于根据被控对象不同行驶状态调整传动比,以使得转向操纵轻便、转向灵活。
预设传动比的前轮转角控制流程为:将转向轮目标转角θ信号输入转向执行机构,由此获得被控汽车前轮转角δ1,并将前轮转角δ1作为整车模型输入;获取被控汽车的速度u,并根据u值通过传动比i选择器确定传动比,将此值与方向盘转角θsw进行比较,再次得出转向轮目标转角θ信号。其控制框图如图2所示。
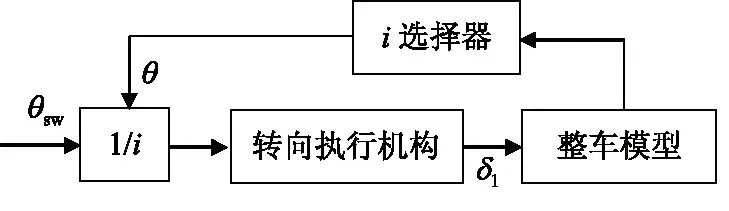
图2 前轮转角控制策略框图
汽车操纵期望是在速度较高时能够有大的传动比,反之亦然。在控制框图中,传动比i选择器需预先建立传动比与车速之间的函数关系,考虑研究内容的普遍性和宽泛性,建立在常规行车时转向前轮预设传动比关系式如下:
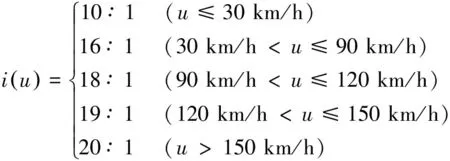
(4)
2.2 控制策略下的后轮转角控制
对后轮转角控制采用“前馈+反馈”的控制方式,其具体控制策略为:后轮转角控制器在前轮转角信号δ1的输入下,将其转换为目标后轮转角;转向执行机构将目标后轮转角作为执行初始参数,并利用该参数实现控制后轮转向。被控对象(即整车模型)接受转向轮转角信号δ2后,计算出车体状态信息横摆角速度ωr和质心侧偏角β。运算器在车体信息的输入下,计算得到转向后轮所受转向阻力T,并将转向阻力T反馈至转向执行机构;同时,将后轮的实际转角大小经计算后作为PID控制器的输入,PID控制器则根据后轮目标转角与输入的实际转角之间的偏差大小控制后轮转角。其控制框图如图3所示。
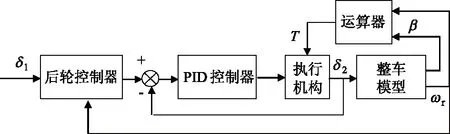
图3 后轮转角控制框图
3 控制系统的仿真分析
对汽车操纵特性进行定量表征与分析通常是采用时域响应分析、频域响应分析与稳定性分析[4]。对被控汽车进行时域响应分析是将阶跃函数作为转向盘输入激励,并分析在此激励下的转向轮的瞬态和稳态响应。先阐述稳态响应的意义[5]:在被控汽车处于匀速直线行驶状态的任意时刻t0使转向盘转动某一角度θ0,并维持角度θ0不变,经过一定时间后(记为t1)汽车进入匀速圆周行驶状态。瞬态响应是被控对象处于时间点t0和t1之间的响应。在实际的行车过程中,汽车较少时间处于稳态响应下的工况行驶,但从理论研究意义上稳态响应反映其基本操纵性能。汽车的瞬态响应与其操纵稳定性存在相关性,表征其稳定性的方式是采用阶跃对方向盘的输入下的瞬态响应。
通过对被控汽车的转向轮系统进行抽象,并由式4所确定的前轮预设传动比关系,在Simulink软件中构建其整个被控对象的转向系统仿真模型(见图4)。
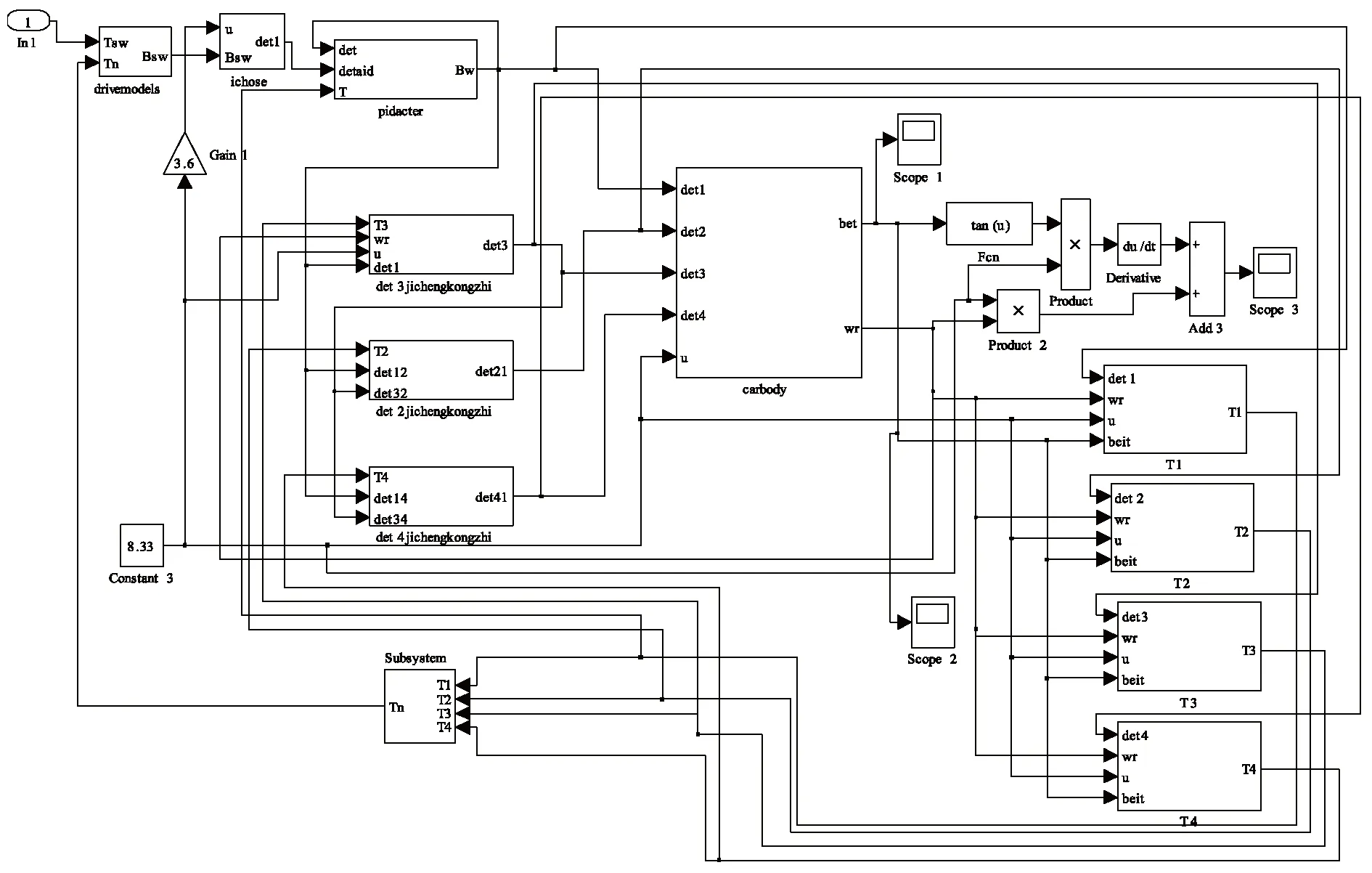
图4 转向系统仿真模型
4 控制系统的仿真结果
根据上述控制策略及构建的仿真分析模型,被控车辆速度设为30 km/h,并分别将前轮按正10°的阶跃转角和π/180的斜坡输入作为激励,求得在正10°的阶跃转角下的侧偏角β、横摆角速度ωr和侧向加速度ay的响应曲线(见图5)。
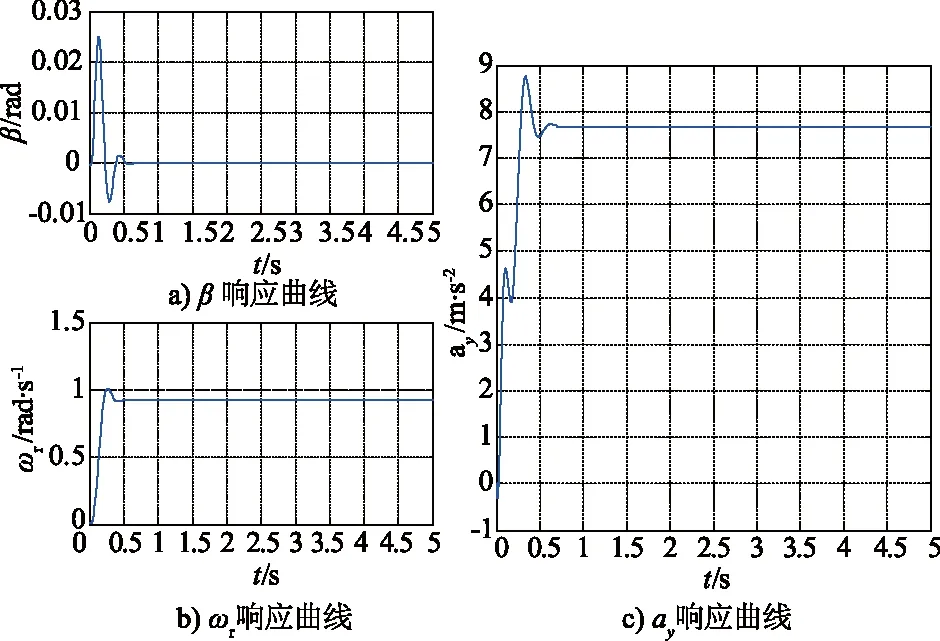
图5 正10°的阶跃转角输入下的响应曲线
为对比分析,本文对未采用该控制策略的传统车辆进行仿真分析,在相同输入激励下,其横摆角速度ωr和侧向加速度ay的响应曲线如图6所示。
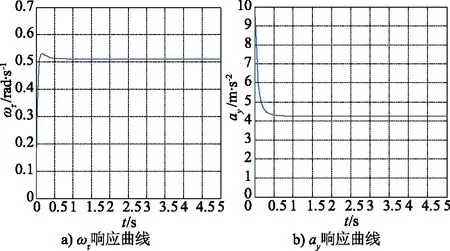
图6 未采用本文控制策略的响应曲线
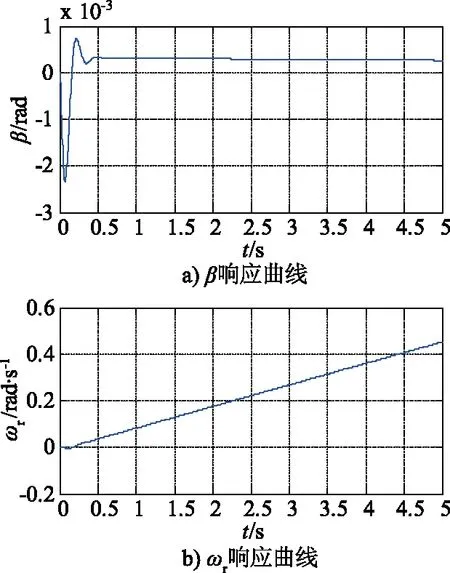
图7 斜坡输入下的β、ωr响应曲线
同样,进一步求取在斜坡输入激励下的侧偏角β和横摆角速度ωr的响应曲线(见图7)。该控制策略下的被控车辆响应特性为稳定时间为0.4 s,超调量为109%。对比未采用该控制策略的被控对象,在相同输入激励下,该控制策略在稳定时间减少的同时,稳态横摆角速度值稍偏大,其响应更为迅速;同时,该控制策略下的汽车的稳态侧向加速度很大,响应时间快,这就使得汽车在该控制策略下能够获得很好的紧急避障能力。但从响应曲线中可以看出,存在振荡时间较长的问题,这意味着会使汽车操纵难度增大。在匀速行车过程中,该控制策略下的被控车辆在操纵人员的持续转向操纵下仍可以获得质心侧偏角β基本为零这一目标。
5 结语
本文提出了对汽车前轮的转向控制采用预设传动比、对汽车后轮采用前轮转角比例前馈加横摆角速度比例反馈实施控制的方式。通过建立预设传动比函数关系并利用Simulink软件构建仿真模型,其仿真结果表明:该控制策略能够很好地实现本文的控制目标,使稳态侧偏角为零,并使得反应时间和转向能力都有所提高;但该控制策略使汽车从瞬态到稳态之间的震荡过程增加,延长了加速度响应稳定时间。该控制策略基本有效,为汽车的转向控制提供了有益借鉴和思考。
[1] 崔胜民.现代汽车系统控制技术[M].北京:北京大学出版社,2008.
[2] Yih P,Gerdes J C.Steer-by-wire for vehicle state estimation and control [J].AVEC,2004.
[3] 魏丽丽.提高操纵稳定性的汽车前轮电子转向系统控制方法研究[D].长春:吉林大学,2006.
[4] 何仁,李强.汽车线控转向技术的现状与发展趋势[J].交通运输工程学报,2005,5(2):68-72.
[5] 于长官.现代控制理论及应用[M].哈尔滨:哈尔滨工业大学出版社,2005.
