基于LabVIEW起落架磁流变减震器模糊控制系统设计与分析
2015-04-16中国民航大学航空工程学院天津300300
, , (中国民航大学 航空工程学院, 天津 300300)
引言
飞机在着陆和滑跑时会与地面剧烈碰撞引起颠簸,这对飞机结构和飞机安全都极为不利。传统油-气减震器只能被动地对受到地面的冲击做出反应,因此需要一种可调节、适应能力强的新型减震器来吸收和耗散冲击产生的能量。磁流变减震器能够根据飞机着陆和滑跑时来自跑道的激励,通过调节作用在磁流变减震器上的电流,即磁场强度来改变输出的阻尼力。目前,磁流变减震器在建筑、桥梁和高端汽车上已有广泛应用[1-3],但在我国航空运输方面的应用研究还比较少。由于外加磁场的非线性、回滞性和饱和性,磁流变减震器是一个非线性系统,常规控制方法如PID控制,难以满足控制要求。模糊控制不依赖于被控对象精确的数学模型,对非线性、时变性系统具有较强的动态性和鲁棒性,控制方法简单。参数自整定模糊控制有较强的适应能力,在被控对象特性变化或扰动的情况下进行自动校正,仍能保持较好地控制性能。
1 LabVIEW模糊工具包简介
LabVIEW是美国某公司推出的一种基于数据流的图形化编程语言——G语言、具有编译能力的虚拟仪器软件开发平台,基于该平台的模糊逻辑工具包具有友好的人机交互界面,直观方便地进行模糊控制器设计,并与完善的数据采集、信号分析和其他外部扩展设备紧密结合,快速搭建交互式控制系统图形用户界面,进行模糊控制器仿真与应用。
LabVIEW的模糊逻辑工具包为基于规则的模糊控制器的设计提供了一个高效方便的开发环境,子程序主要包括以下部分[4,5]:
1) 模糊系统设计VI(Fuzzy System Designer)
由模糊集合编辑器、模糊规则库编辑器和输入输出性能测试三部分组成。通过友好的人机图形交互界面,用户可以直观方便地设计模糊控制器的隶属函数、控制规则、解模糊化方法等参数,并对模糊控制器的输入、输出性能进行测试。设计好的模糊控制器,以*.fc 形式保存于数据文件中。
2) 模糊控制器VI(FL Fuzzy Controller.vi)
将设计好的模糊控制器作为一个图形功能模块应用于后台的框图程序中,多个控制器并联可以实现模糊系统的复杂结构。
3) 模糊系统载入VI(FL Load Fuzzy System.vi)
同模糊控制器VI连接的后台框图程序,用于将保存在*.fc数据文件中的所有模糊控制器参数加载到模糊控制器VI中。
4) 模糊系统保存VI(FL Save Fuzzy System.vi)
将设计好模糊控制器数据保存为*.fc形式文件。
2 起落架系统动力学模型建立
以飞机起落架系统为模型进行简化,考虑到系统非线性对震动性能的影响及研究问题的需要,作如下假设:机身部分荷载质量具有相当大的惯性,且弹性相对较小,可以把机身部分视作刚体,减震弹簧弹性大而惯性比机身的小得多,可以简化成只有弹性而无质量的弹性元件,机轮简化为单自由度的阻尼元件,因此,简化的起落架系统模型如图1所示。
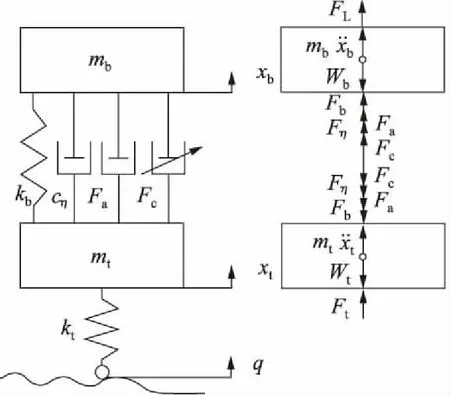
图1 起落架系统动力学模型
图1中,mb为机身、机翼、尾翼等组成的簧载质量;mt为缓冲器支柱、机轮及轮胎等构成的非簧载质量;Wb为簧载质量重力;Wt为非簧载质量重力;FL为机体所受升力;kb为等效缓冲器支柱刚度;cη为磁流变减震器的粘滞阻尼系数;xb为飞机机体的位移;xt为轮胎中心的垂直位移;kt为轮胎等效刚度;q为路面输入激励。
根据牛顿第二定律,系统的运动微分方程为:
(1)
式中,参照文献[6]、[7]:
FL=[1.2-0.9tanh(3t)](Wb+Wt)
(2)

F=Fη+Fc+Fa
(3)
(4)
(5)
(6)
式中,pge和Vge分别为磁流变减震器气室的初始压强和初始体积;Ap为缸筒内腔截面积;Ar为活塞有效直径。
3 LabVIEW模糊控制系统设计
3.1 模糊控制器设计[8,9]
控制器采用参数自调整模糊控制,控制原理如图2所示,提高了系统的动态特性和控制精度。取机身垂直加速度a和机身位移xb作为模糊控制系统的输入量,输出量为大小变化的电流值I。
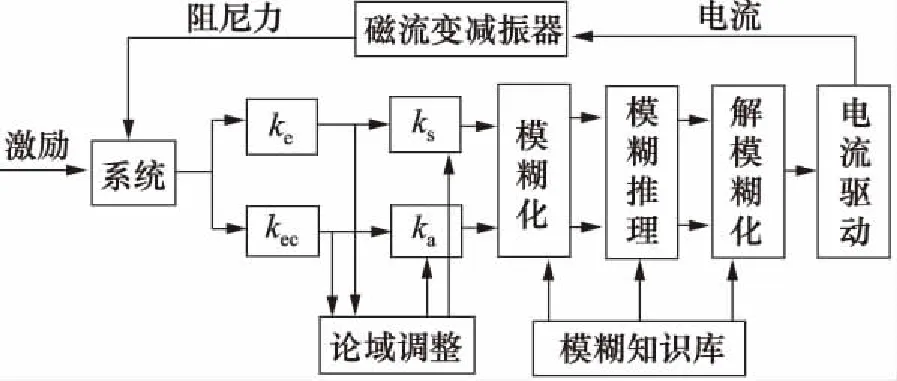
图2 模糊控制原理图
(1) 输入、输出量模糊化与隶属度函数确定。对于模糊控制器的输入量机身垂直加速度a和机身位移xb,选择适当的量化因子进行归一化处理,输入量模糊论域均为[-1,1],对应模糊子集划分为{NB,NM,NS,ZO,PS,PM,PB},输出量电流i模糊论域为[0,1],对应模糊子集划分为{ZO,S,SM,M,SB,MB,B},输出量论域调节因子ks、ka的模糊论域均为[0,1],对应的模糊子集为{ZO,S,M,B},输入、输出变量均采用三角形隶属度函数。在LabVIEW的Tools菜单下选中Fuzzy System Designer项就会进入模糊系统的编辑界面,选项卡Variables可以对输入、输出量的论域范围及隶属度函数参数设置,如图3a所示。
(2) 模糊规则建立及解模糊化。模糊规则库是由一系列“if-then”型式的语句构成,选项卡Rules可以对模糊规则进行建立和编辑,选择需要的推理算法和解模糊化方法,并可以为每条控制规则设置相应的加权值,对模糊规则进行优化。本研究采用最大中心法(CoM)解模糊化,如图3b所示。
(3) 模糊系统测试。选项卡Test System可对设计的模糊控制系统输入、输出特性进行测试,如图3c所示。三维的模糊控制规则显示图可以直观地表达输入输出的关系及控制规则是否完备,以利于模糊系统的改进优化,调试好后,以*.fc形式保存于数据文件fuzzycontrol1.fc及fuzzycontrol2.fc中。
模糊控制规则如表1。
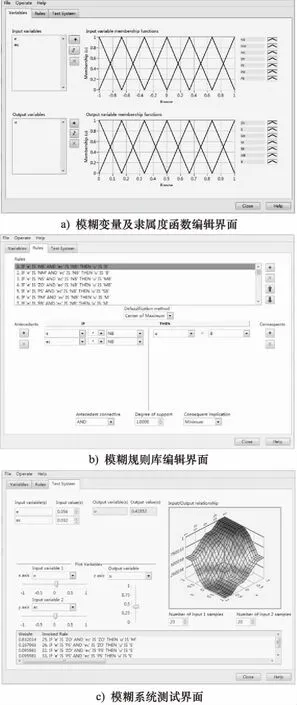
图3 LabVIEW模糊系统设计
3.2 模糊控制仿真
通过LabVIEW的模糊逻辑工具箱和其他控件在框图程序中构建完整的模糊控制系统, 起落架系统的动力学模型通过数学模块菜单下选择脚本与公式中的MathScript节点完成。控制系统的前面板用户界面和程序框图如图4所示。设置仿真参数,加载.fc文件,运行模糊控制系统VI,就可以直观方便地对控制信号进行动态跟踪,在前面板用户界面以曲线和数值的形式动态显示。
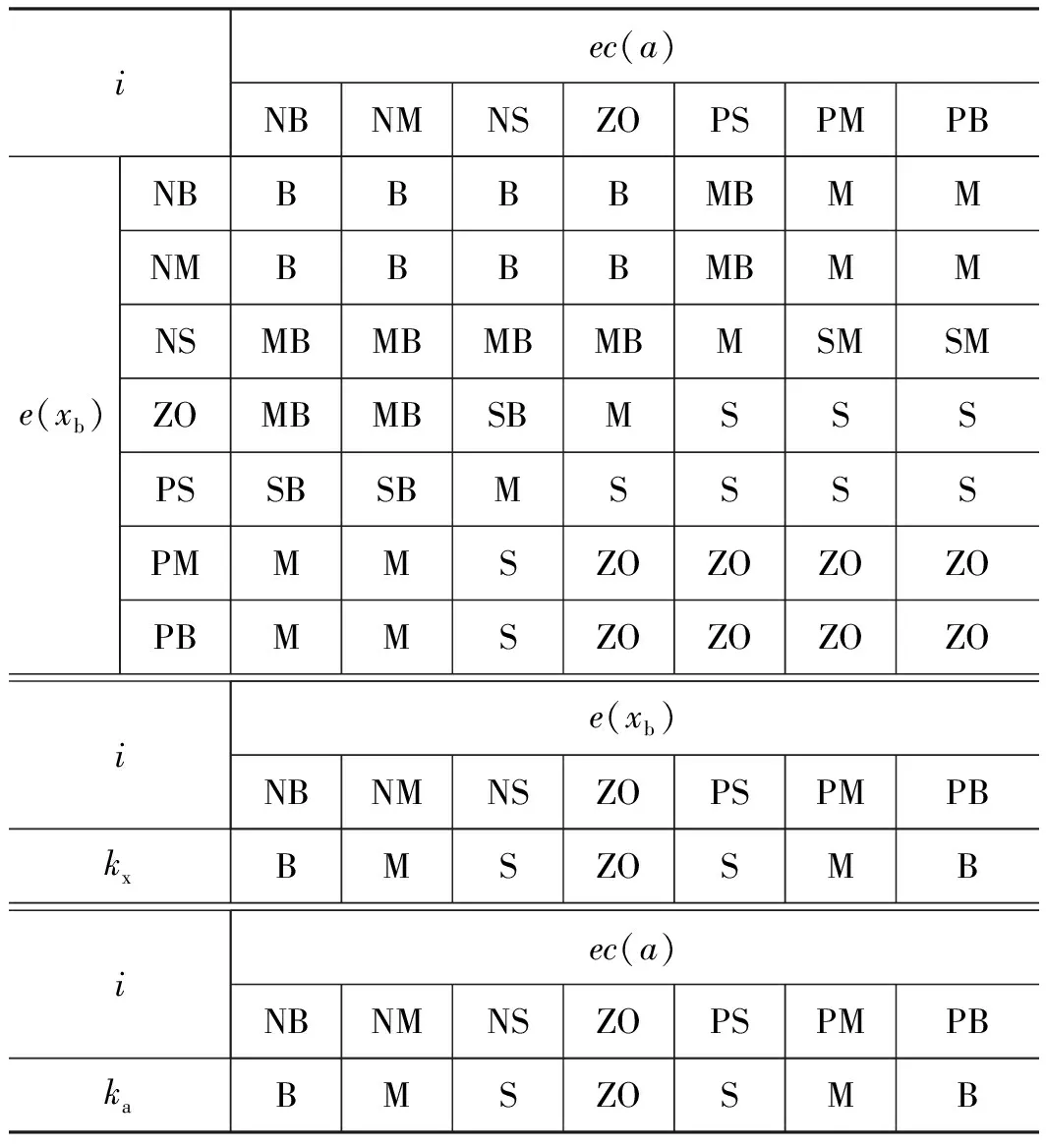
表1 模糊控制规则表
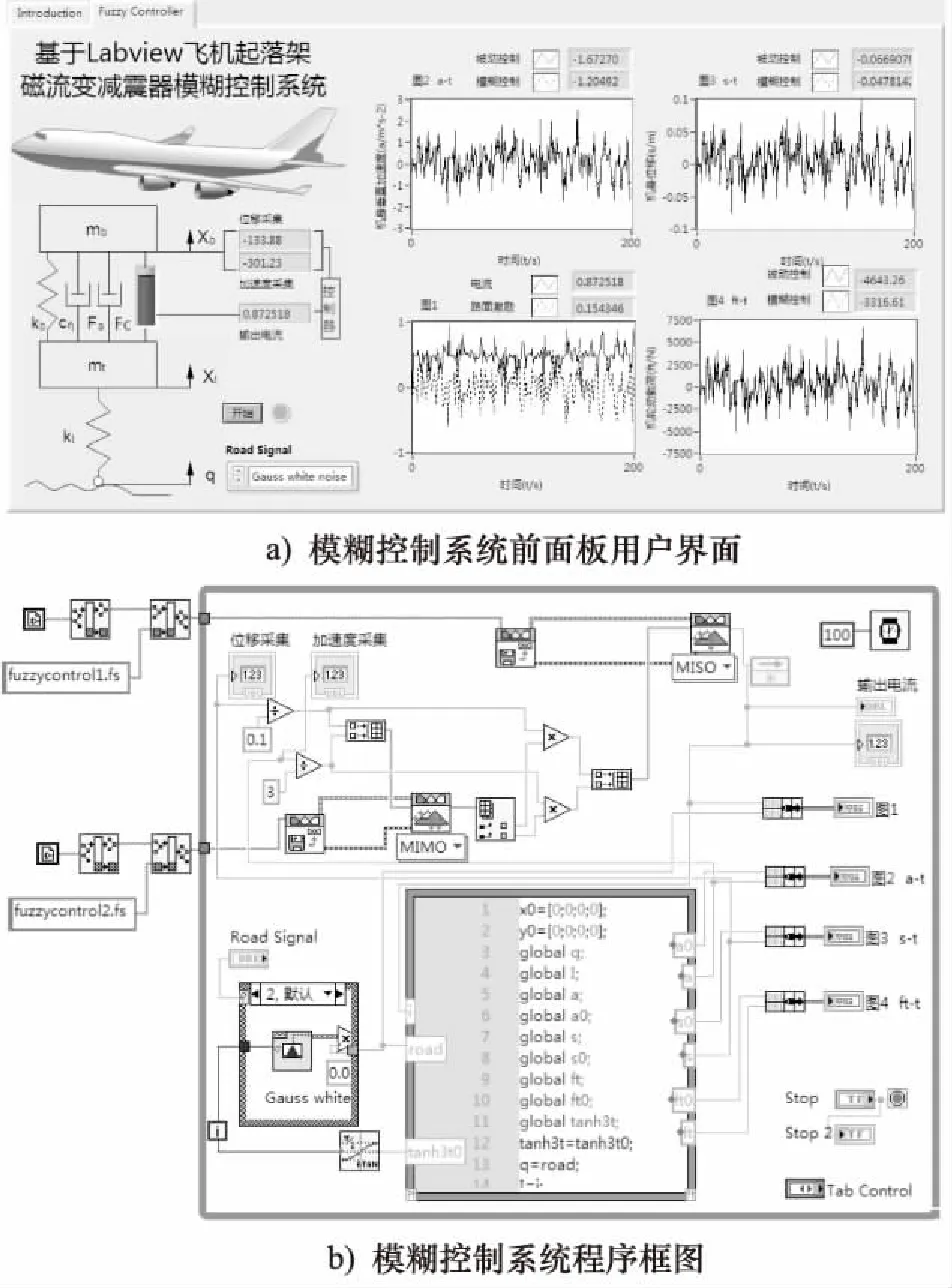
图4 LabVIEW模糊控制系统软件

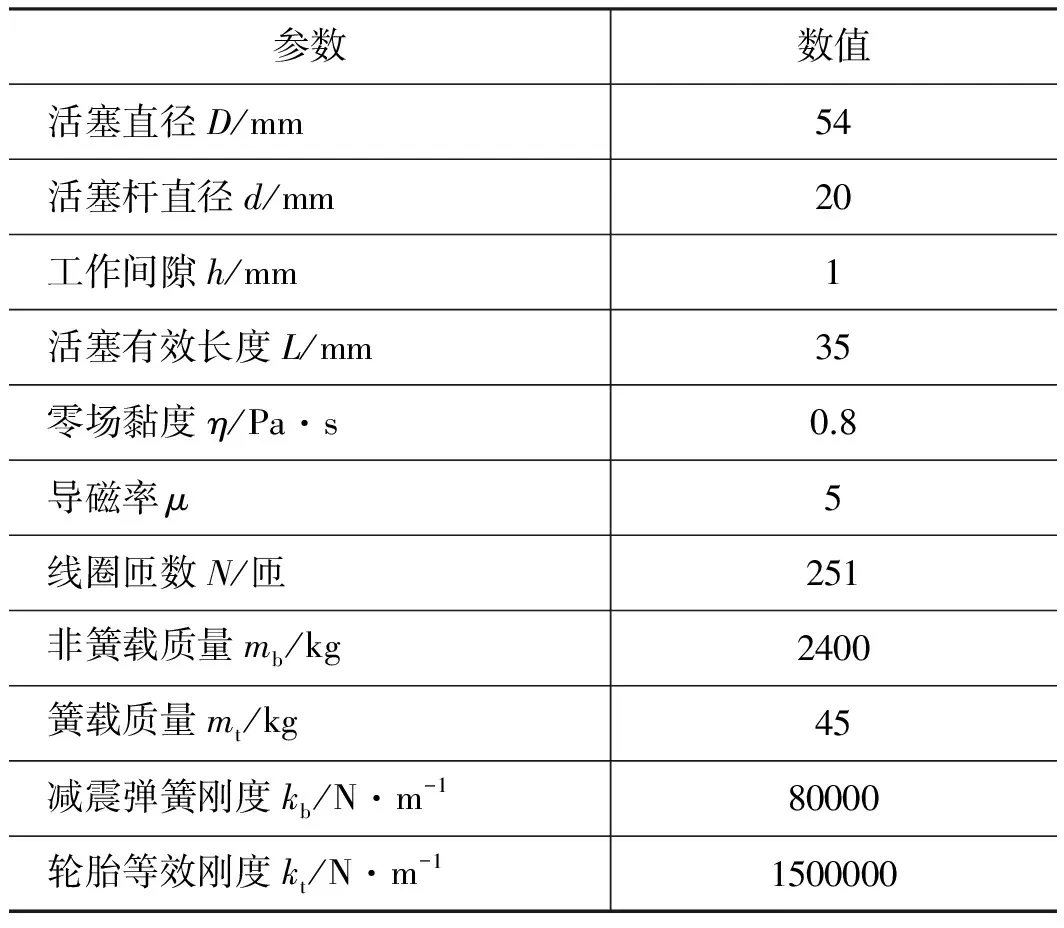
表2 模型仿真参数
在LabVIEW环境下,起落架磁流变减震系统模型在不同时刻的机身垂直加速度(a)、机身相对位移(s)和机轮动载荷(ft)的仿真曲线如图5所示。

图5 不同控制方式下的仿真结果比较
仿真结果表明,机身垂直加速度、机身位移和机轮动载荷的峰值明显减小,峰值个数减少,相比于被动控制,模糊控制具有较好的控制效果。
4 试验结果与分析
试验系统以飞机起落架系统为模型进行简化,模糊控制器作为反馈调节,实现对磁流变减震器阻尼力的模糊控制。实验震动平台(如图6所示)主要有以下几个部分组成:
(1) 液压源为系统提供动力,供油压力21 MPa;
(2) 震动台部分主要由减震器、减震器台面、垂直油缸、伺服阀、位移传感器、加速度传感器等组成的垂直震动系统。伺服阀选用美国某公司SE60-SIISBNA60,位移传感器选用广州某公司YCM-LPM和NS-WY02型回弹式位移传感器,加速度传感器选用上海某公司SCA320-CC5V1G;
(3) 硬件控制电路中各路传感器数据通过信号放大、调理,控制器为DSP28335控制板;
(4) 计算机控制系统由上、下位机和数据采集卡组成,完成整个系统运行状态监控和数字闭环控制。上、下位机为台湾某公司的IPC610,A/D、D/A由PCI1716板卡实现。
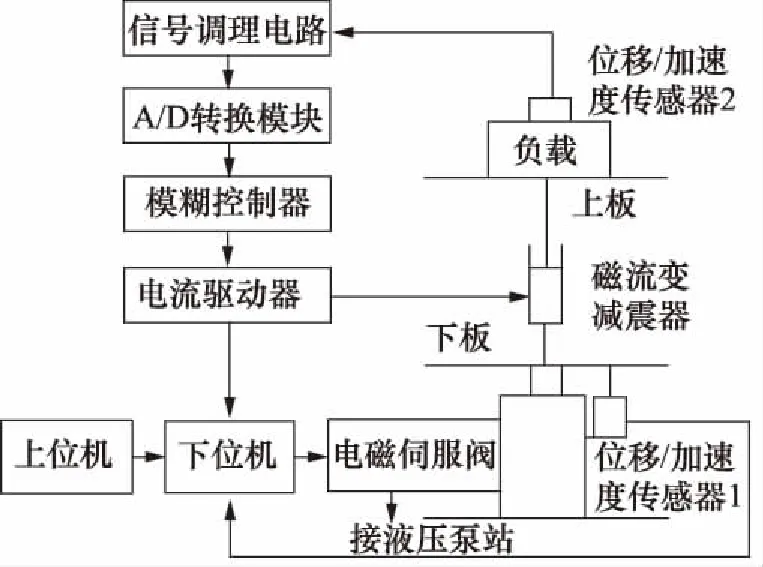
图6 磁流变减震器试验系统平台
LabVIEW平台具有强大的数据采集、信号处理和外部扩展功能,上位机中基于LabVIEW模糊控制系统软件可以通过扩展接口读取传感器采集的位移、加速度信号,并作为模糊控制系统输入量,得出相应电流值,数据传给DSP控制板,驱动输出适当电流,图7是模糊控制和被动控制下实验效果数据对比。
实验结果表明,模糊控制下的加速度(a)、位移(s)峰值有所减小,低于被动控制,本研究的模糊控制系统在磁流变减振器震动实验中起到了一定的控制作用。

图7 不同控制方式的实验结果比较
5 结论
利用LabVIEW虚拟仪器技术和模糊逻辑工具包实现了起落架磁流变减震器的模糊控制,体现了模糊控制的鲁棒性和动态特性,通过参数自整定和量化等级调整提高了模糊控制精度,控制效果较好。
LabVIEW图形化的人机交互界面、强大的信号处理模块及外部设备扩展功能可以方便、直观地对信号进行跟踪处理,提高了模糊控制系统的开发效率,具有较大的工程实用价值。
参考文献:
[1]李忠献,徐龙河.新型磁流变阻尼器及半主动控制设计理论.北京:科学出版社,2012.
[2]徐龙河,周云,李忠献.半主动磁流变阻尼控制方法的比较与分析[J].世界地震工程,2000,16(3):95-100.
[3]徐晓美,郑燕萍.汽车半主动悬架系统模糊控制仿真研究[J].科学技术与工程,2010,(29):7202-7205.
[4]汪敏生.LabVIEW基础教程[M].北京:电子工业出版社,2002.
[5]National Instrumets.Fuzzy Logic for G Toolkit Referencemanual[M].Austin:National Instruments,1997.
[6]Khani M.Magnetorheological(MR)damper for Landing Gear system[M].2010.
[7]贾玉红,武晓娟.基于磁流变缓冲器的飞机起落架模糊控制[J].北京航空航天大学报,2008,3(11):1264-1267.
[8]张永胜,高宏力,刘庆杰.基于 LabVIEW 的模糊控制系统设计[J].仪表技术与传感器,2012,(3):27-29.
[9]赵宝纯,骆宗安,刘相华.基于 LabVIEW 的模糊控制器设计与仿真[J].控制工程,2006,13(1):49-52.
[10]黄琦,李华琳,陈勇,等.起落架磁流变减振系统的特性分析研究[J].电子科技大学学报,2010,39(6):870-874.
[11]徐冬苓,李玉忍.飞机起落架数学模型的研究[J].系统仿真学报,2005,17(4):831-833.
[12]王鹏辉,许金余,李为民,等.机场道面不平度功率谱特性研究[J].中外公路,2008,28(3):50-53.