线性不确定性电液位置伺服系统的前馈补偿滑模鲁棒跟踪控制研究
2015-04-16,,
, ,
(常州大学 机器人研究所, 江苏 常州 213164)
引言
电液伺服系统不可避免地存在许多不确定性因素,这主要是由于系统的流量压力特性或者是由于负载系统运动本身引起的,如:系统参数(如油源压力、系统综合刚度、惯性质量、执行件运动时的黏性摩擦力、油温等)的变化;外部负载扰动;系统的复杂性和非线性。
在实现对电液伺服系统的控制时,必须考虑不确定性因素,否则,很难保证有效的控制效果。在实际工程应用中,不确定性因素导致系统的数学模型含有某种不确定性参数,甚至导致系统结构的不确定性,按照系统标称参数设计的控制器就可能达不到预期的性能;当不确定性超过一定程度,有可能引起系统失稳。因此,不确定性系统的鲁棒跟踪控制问题以及与此相关的鲁棒稳定控制得到人们重视[1,2,6]。对于线性不确定性系统跟踪控制问题,一般的方法是基于Riccati方程来设计线性状态反馈控制器,使系统的输出鲁棒跟踪某一理想模型的输出,文献[1,2,4,5]等都在这一方面进行了理论研究,取得了较好的效果。对于非线性不确定性电液伺服系统控制问题的研究近十几年来受到学者的广泛关注,除了采用自适应控制、变结构控制外,还出现了学习控制、神经网络控制等一些新的方法。
本研究基于滑模变结构控制的基本理论,讨论实际中不确定性线性电液位置伺服系统的鲁棒跟踪控制问题,当这些不确定性满足某些条件时,得出适当的切换函数和控制律实现前馈补偿滑模鲁棒跟踪控制。
1 不确定性系统概述
根据文献[7],不确定性系统是指那些带有不确定参数,不确定动力学(系统摄动)及存在外部干扰的系统,按系统是线性和非线性,又可分为线性不确定系统和非线性不确定系统。按照不确定性的特征又分为匹配不确定性系统和非匹配不确定性系统。
对于一般线性不确定系统,经常被描述为[2]:
x=[A+ΔA(p(t))]x+[B+
ΔB(p(t))]u+D(x,p(t))
(1a)
y=C0x
(1b)
其中:A、B、C0是已知的常值矩阵,或系统的标称矩阵,且(A,B)可控。x∈Rn为状态变量,u∈Rm为控制变量。D(x,p(t))∈Rn为扰动向量,y∈Rp为输出变量,并假定可变参数向量p(t)为勒贝格可测,且p(t)∈Ω⊆Re,Ω是一有界紧集,ΔA(p(t))、ΔB(p(t))表示系统的不确定性。
不确定性系统的控制问题,用一个确定的控制器来控制一簇系统。即不管系统中的参数和扰动如何变化,甚至系统的动力学有所变化,系统在这个确定的控制器作用下,都能够正常工作,并能保证某些控制性能。为此,在研究不确定系统的控制问题时,需要做一些假设条件:

∀p∈Ω
(2a)

(2b)

(2c)
则称不确定系统(4.1)是匹配的[6]。
满足匹配条件的意义在于把系统的不确定性及扰动限制在输入通道,这等于“将不确定性置于控制之下”,综合适当的控制律有可能抵消不确定性的影响。
(2) 强度限制条件,如:
||ΔA||≤ζ(x,p,t)
(3a)
||ΔB||≤r(x,p,t)
(3b)
||ΔD||≤π(x,p,t)
(3c)
其中:ζ、r、π均是某有界标量函数或正常数。
这样的强度限制条件,能够根据不确定性的界来设计合适的控制器,以消除不确定性的影响。

本研究主要研究线性匹配不确定性系统的跟踪控制问题。
2 前馈补偿滑模鲁棒跟踪控制器设计
考虑如下线性不确定性系统:

(4a)
y=c0x
(4b)
其中:
x=[x1x2,…,xn]T,是系统的状态变量,u∈R是系统的控制输入,y是系统的输出,a=[a1a2,…,an]T是系统的参数向量,Δa=[Δa1Δa2,…,Δan]T表示对应的参数向量的不确定性,b(t)是系统的增益,且满足:
b(t)>0,bmin≤b(t)≤bmax
(5)
其中:bmin、bmax是已知正常数,f是系统的扰动,且满足:
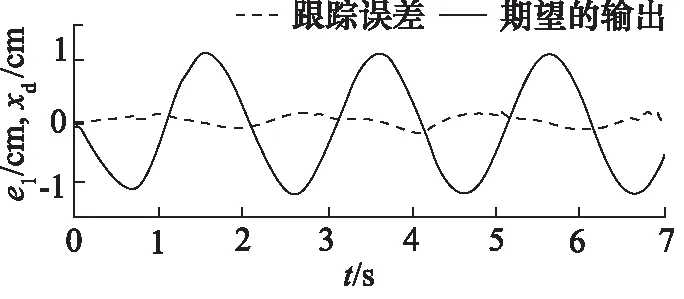
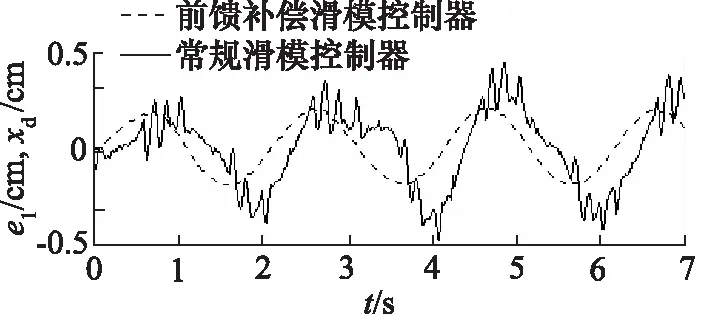
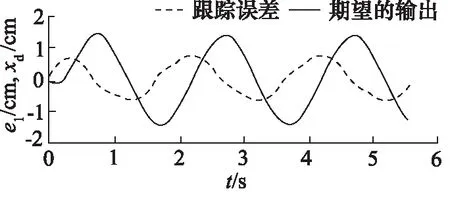
|f| (6) (7) 对上述系统控制的目标仍然是选择合适的切换函数,综合适当的控制律使得: (8) 为此,按下式选择新的状态变量,并代入式(4): 可得误差型状态方程: (9) 然后,对系统式(9)设计前馈补偿滑模鲁棒跟踪控制器。首先选取线性滑模流型如式: s=CTe (10) 控制律取如下结构: (11) 其中:K1=[k1i]∈Rn,(i=1,2,…,n)。 控制器结构如图1所示,控制器参数选择如下: (12a) (12b) (12c) k4=p3>1,SDr>0 (12d) k4=p4<1,SDr<0 (12e) 其中: 系统控制器结构简图如图1所示。 图1 控制系统结构简图 对上述系统式(4)及所设计的前馈补偿滑模鲁棒跟踪控制器,有下面的定理: 定理1:对不确定性线性系统式(4),当选择滑模流型如式(10)、控制律如式(11)和式(12),则当t→∞时的某一时刻,跟踪误差e1沿滑动模态趋向原点,且整个系统是李亚普诺夫意义下渐近稳定的。 证明:选取李亚普诺夫函数为: 则: (13) 对式(10)求导有: =(CTA-bk1)e-(bk2s-CTΔAe)- (14) 则: (15) 因为: |s|≤Cm||e|| (17) 将式(12)代入式(15),再结合式(16)~式(18)的结果,则有: (19) 式(19)的结果表明:对系统式(4),由式(11)和式(12)所构成的前馈补偿滑模鲁棒控制器,能保证系统的到达条件成立,所以当系统的状态到达滑动面后,将在有限时间内沿滑动面收敛至原点。滑动模态方程为: (20) 保证了跟踪误差e1→0(t→∞),从而整个闭环系统也是渐近稳定的。 考虑某结构疲劳试验机系统,对其力平衡方程、阀流量方程及流量连续性方程的线性化和综合推导,系统微分方程可描述为[7]: (21) 其中:ai(i=1,2,3)、b分别是系统的综合参数ai和控制增益。 对这一系统,当系统参数如负载刚度K、等效负载质量M、流量增益Kq、流量-压力系数Kc等变化时,系统的综合参数ai和控制增益b随着系统参数的变化而变化,考虑其中某一参数变化,利用对时变参数系统的研究方法进行研究并设计出跟踪控制器;当综合参数ai或者控制增益的变化由系统多个参数变化的综合效应所致,或由其他不确定性因素(如未建模因素、环境因素等其他一些未知因素)所引起的,则不确定系统是由一个确定的标称系统和一个不确定性系统组合而成的系统,可以把系统式(21)表示为更一般的线性不确定性系统: (22) 其中:A为已知常值矩阵;ΔA为系统的不确定性;f为有界扰动;u、y分别为系统的控制输入和系统的输出,且: 假设: |Δai|<Δam, (i=1,2,3) (23) bmin≤b(t)≤bmax,b(t)>0 (24) |f|≤f0 (25) (26) 且在假设式(23)~式(25)中,Δam、bmin、bmax、f0是已知常数。 e1=xd-x1 (27a) (27b) (27c) e=[e1e2e3]T (27d) 代入式(27)、式(22),则对应于系统式(22)的误差型状态方程为: (28) 前馈补偿滑模鲁棒跟踪控制律均按式(10)、式(11)选取,控制器参数按式(12)选取,系统标称参数见文献[8],对系统的不确定性,根据负载刚度及等效负载质量等的变化,假设满足下式: |Δai|<Δam=1.344×106 (29) 对滑模参数有估计值:Cm=5。 选择xd=sin10πt,采样周期取2 ms,扰动f取幅值为2的正弦信号。仿真结果示于图2和图3,图2是误差曲线,图3是滑模曲线。 图2 跟踪误差曲线 图3 滑模曲线 图2表明,对存在匹配不确定性和外扰动的疲劳试验机位置伺服系统,根据系统综合参数的不确定性的界值来设计前馈补偿滑模跟踪控制器,就能保证跟踪误差到所期望的范围内,图3表明,所提出的控制器保证了滑模的渐近稳定性。 为进一步验证理论分析及仿真结果的有效性,以某结构疲劳试验机电液位置伺服系统为控制对象,应用所设计的前馈补偿滑模鲁棒跟踪控制器,进行了实时控制研究,研究目的是通过实时控制,证明所提出的控制方法的有效性,证明即使在系统参数变化和存在未知扰动等不确定性因素的情况下,所设计的控制器仍然能鲁棒地跟踪期望的给定信号。 1) 控制器设计 首先设计切换函数:按式(10)选择切换函数,由式(10)可知,切换函数的设计需要给定信号和位置反馈信号及其一、二阶导数,按下式来近似xd、x1的一、二阶导数: (30) 对x1的一、二阶导数也亦依照与式(30)类似的方法处理。 x1由位移传感器反馈后再经A/D转换由微机采集得到,xd由超低频信号发生器产生。 控制律设计:控制律按式(11)设计,系统参数的标称值参见文献[7],且控制器的各参数依仿真参数做为初值来确定。 2) 实验系统 实验系统主要由以下部件构成:超低频信号发生器;微型计算机;A/D转换器采用12位分辨率的AD1674,转换速度小于10 μs,非线性误差:±1 LSB;D/A转换器采用12位分辨率的DAC1210,转换综合建立时间小于2 μs;伺服放大器和功率放大器;位移传感器,采用FX61系列差动变压器式位移传感器,精度等级为0.1级。 采样周期选10 ms,在所用微机上,控制算法的完成不超过3 ms。为了检验控制器的跟踪特性以及控制算法的鲁棒性,进行空载和带负载实验;油源压力选择:空载时最大选择5 MPa,加载时最大选择10.5 MPa,油温30~55 ℃。 3) 实验结果及分析 实验结果示于图4~图8中。图4是空载情况下,前馈补偿滑模鲁棒控制系统对频率为0.5 Hz的正弦信号的跟踪误差曲线,图5是带负载情况下(以橡胶减振装置作为试件),该控制器对频率为0.5 Hz的正弦信号的响应误差曲线;图6是带负载情况下前馈补偿滑模鲁棒跟踪控制器跟踪2 Hz的正弦信号的响应误差曲线。图7和图8分别是空载和带负载情况下原系统采用模拟PID调节器跟踪同一频率的正弦信号的误差曲线。 图4 跟踪0.5 Hz正弦信号的误差曲线(空载) 图5 跟踪0.5 Hz正弦信号的误差曲线(带负载) 图6 跟踪2 Hz正弦信号的误差曲线(带负载) 图7 跟踪正弦信号的滑模曲线(带负载) 图8 原系统采用模拟PID控制的响应误差曲线(空载) 图9 原系统采用模拟PID控制的响应误差曲线(带负载) 由图4~图6可以看出,所提出的前馈补偿滑模鲁棒跟踪控制器对系统参数变化和扰动等不确定性具有强的鲁棒性,在不同负载条件下都能保证对不同频率的正弦信号的跟踪误差在6%以下;比较图7中的两条滑模曲线可知:控制器中引入PI控制作用保证了满意的滑动模态品质,对削弱常规滑模控制所固有的抖振现象有较明显的效果;比较图4和图8以及图5和图9可以得到:采用本章所设计的控制器比原系统采用模拟PID控制器的跟踪精度提高了大约6倍左右。实验结果和仿真结果基本吻合, 其差别在于实际滑模曲线的变化幅度比仿真结果略大,实际跟踪误差和仿真结果比较接近,这主要是由于实际滑模参数和仿真时滑模参数的选择稍有不同所致。 针对存在不确定性参数和负载扰动的某结构疲劳试验机电液位置伺服控制系统的鲁棒跟踪控制问题,提出了一种前馈补偿滑模鲁棒跟踪控制方法, 并证明 了闭环系统的渐近稳定性。系统仿真和实时控制结果均证明:对存在不确定性的结构疲劳试验机电液位置伺服系统,应用所提出的具有前馈补偿的滑模鲁棒跟踪控制器能使滑动模态品质得到较大的改善。前馈补偿的引入对提高跟踪精度有重要的作用,并且对系统的不确定性起到了一定的补偿作用,对滑模函数的PI调节,能较有效地削弱常规VSC所固有的抖振现象。在不同的负载条件下跟踪不同频率的正弦信号均能获得良好的跟踪精度,控制器对系统的不确定性呈现较强的鲁棒性。 参考文献: [1]T H Hopp,W E Schmitendort. Design of a Linear Controller for Robust Tracking and Model Following, Trans. of the ASME[J].Dynamic Sys. Meas.Control,1990,(112):552-558. [2]W E Schmitendort, B R Barmish. Robust Asymptotic Tracking for Linear Systems with Unknown Parameters[J]. Automatica,1986,3(22):155-160. [3]W E Schmitendort. Methods for Obtaining Robust Tracking Control Laws[J]. Automatica,1987,5(23):675-677. [4]倪茂林,湛颖.含时变不确定性系统的鲁棒跟踪控制[J].自动化学报,1993,5(19):513-519. [5]彭晓红,宁永臣,张福恩.时变不定线性系统的鲁棒跟踪控制器设计[J].自动化学报,1996,3(22):358-360. [6]Zhang X, Zhao K, Sun L. Nonlinear Speed Control for PMSM System Using Sliding-Mode Control and Disturbance Compensation Techniques[J].IEEE Transactions on Power Electronics,2013,28(3):1205-1215. [7]段锁林.不确定性机电伺服系统的滑模鲁棒跟踪控制及其应用研究[D].西安:西安交通大学,1999.


3 不确定性电液位置伺服系统的前馈补偿滑模鲁棒控制
3.1 问题描述


3.2 前馈补偿滑模鲁棒跟踪控制器设计及系统仿真


3.3 实验研究



4 结论
