线加速度计在不同量程下的动态校准*
2015-04-15欧阳恒廖建平何懿才
熊 磊,欧阳恒,廖建平,何懿才
(1 中航工业北京长城计量测试技术研究所,北京 100095;2 中国兵器工业第203研究所,西安 710065)
线加速度计在不同量程下的动态校准*
熊 磊1,欧阳恒2,廖建平1,何懿才1
(1 中航工业北京长城计量测试技术研究所,北京 100095;2 中国兵器工业第203研究所,西安 710065)
为了实现线加速度计的动态校准,对应线加速度计不同的量程范围,有着不同的实现方法和相应的校准设备。文中介绍了在重力场范围内所用的倾斜轴转台校准方法、高于1g范围所用的双离心机校准方法和实现微加速度动态校准的数学摆台方法,介绍了各种校准设备的组成和原理,推导了其加速度数学模型,对校准设备所复现加速度的幅值不确定度进行了分析,通过上述校准设备,可实现线加速度计在5×10-7~700 m/s2量程范围内的动态校准。
动态校准;线加速度计;倾斜轴转台;双离心机;数学摆台
0 概述
线加速度计是惯导系统中最重要的元件之一,它用于测量运载体的加速度,为惯导系统提供精确的加速度信息,惯导系统通过对加速度计的输出信号积分,可获得运载体的速度和位移。加速度计的性能指标直接影响到惯导系统的位置精度、速率精度等指标。加速度计在装配到惯导系统之前,必须根据其数学模型方程进行校准测试,以获得模型方程系数并进行补偿。
加速度计的校准可分为静态校准和动态校准。静态校准是指通过复现标准的静态加速度,作为被校加速度计的输入,以确定其静态模型方程参数;动态校准是指通过复现振动加速度等动态加速度,以确定其各项动态参数。线加速度计在不同的量程范围内进行动态校准,有着不同的实现方法和相应的校准设备,如在重力场范围内所用的倾斜轴转台校准方法、高于1g范围所用的双离心机校准方法和实现微加速度动态校准的数学摆台方法。通过上述几种校准设备,可实现线加速度计在全量程范围内的动态校准。
1 重力场动态校准
1.1 校准设备
线加速度计在重力场范围内的动态校准装置即倾斜轴转台,其实现类似于双轴转台。外框轴主要提供角位置功能,以实现倾斜角度φ,内框轴主要提供角速率功能,以实现转速ω。倾斜轴转台在加速度计的动态校准中,需要将被校加速度计的检测质量质心调整到与倾斜轴转台的内框轴旋转中心重合,因此在倾斜轴转台的安装面上需要安装二维精密位移调整机构,通过该位移机构在安装面内进行平面二维调整,使得被测加速度计的安装满足要求。如被校加速度计质心与旋转中心不重合时,外框轴倾斜产生重力加速度分量,内框轴旋转将产生向心加速度,倾斜轴转台将变为倾斜轴离心机。
重力场下加速度计动态校准装置主要技术指标如下:
加速度范围:2×10-4~9.8 m/s2;
加速度频率范围:0.01~30 Hz;
加速度测量不确定度:U=2×10-4m/s2,k=2。
1.2 校准原理
图1为加速度计重力场动态校准的原理图。通过改变加速度计输入轴方向与重力加速度之间的夹角φ,产生标准输入加速度gsinφ;通过台面以不同的转速ω旋转,产生不同频率的动态加速度。某一时刻加速度计沿输入轴(IA轴)方向的输入加速度为:
ai=gsinφcosωt
(1)
式中:φ为装置外轴与重力加速度之间的夹角;ω为内轴转速;g为重力加速度。通过台面匀速旋转运动,实现了正弦周期变化的加速度,并施加到加速度计输入轴。
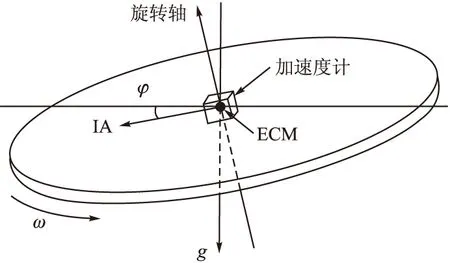
图1 加速度计重力场动态校准原理图
1.3 幅值不确定度分析
以校准设备所复现加速度的幅值为例,进行不确定度分析。校准设备所复现加速度的幅值为A=gsinφ,其测量不确定度由重力加速度g和主轴倾角φ引入:
a)安装位置的重力加速度g引入的测量不确定度

测量不确定度分量:c1(g)u(g)=sinφu(g)
b)主轴倾角φ引入的测量不确定度
测量不确定度分量:c2(φ)u(φ)=gcosφu(φ)
动态加速度幅值不确定度为:
(2)
2 高于1 g动态校准
2.1 校准设备
双离心机如图2所示,主离心机轴系为液体静压轴系,采用直流力矩电机驱动。当主离心机以适当转速旋转时,在从离心机旋转中心产生恒值加速度。从离心机安装在主离心机转盘上,由轴系、电机、工作台、角速率测量装置、导电环等组成。从离心机在主离心机旋转的同时进行旋转,可复现正弦加速度以进行加速度计的动态校准。
双离心机的技术指标为:
加速度范围:10~700 m/s2;
频率范围:0.1~10 Hz;
幅值测量不确定度:在10~20 m/s2范围内,U=1%(k=2);在20~700 m/s2范围内,U=0.1%(k=2)。
2.2 校准原理
如图3所示,在主离心机的转盘上安装从离心机,加速度计安装在从离心机的台面上,其检测质量(proof mass)的质心与从离心机的旋转中心重合。主离心机和从离心机的旋转轴垂直于水平面,加速度计输入轴(IA)平行于水平面。
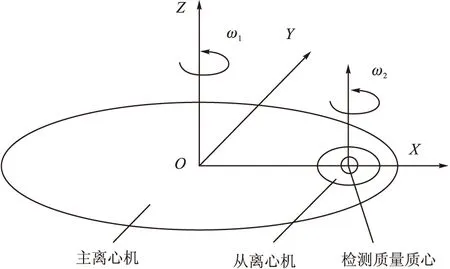
图3 双离心机校准原理图
主离心机以角速率ω1旋转,从离心机以角速率ω2旋转。主离心机旋转产生恒定的加速度幅值,从离心机旋转改变加速度计输入轴方向,从而在加速度计检测质量质心处产生动态加速度。
(3)
试验中,在从离心机台面上安装加速度计时,无法保证其检测质量质心与从离心机的旋转中心完全重合。设加速度计检测质量质心距从离心机旋转中心的距离为R2,主离心机旋转中心与从离心机旋转中心之间的距离为R1,主离心机以角速率ω1旋转,从离心机以角速率ω2旋转,两者方向相同。
(4)
2.3 幅值不确定度分析
a)主离心机角速率ω1引入的测量不确定度
传递系数:
测量不确定度分量:
b)从离心机角速率ω2引入的测量不确定度
传递系数:
测量不确定度分量:
c)主离心机旋转中心与从离心机旋转中心距离R1引入的测量不确定度
传递系数:
测量不确定度分量:
d)加速度计质心与从离心机旋转中心距离R2引入的测量不确定度
传递系数:
测量不确定度分量:
动态加速度幅值不确定度为:
uc(a)=([c1u(ω1)]2+[c2u(R1)]2+ [c3u(ω2)]2+[c4u(R2)]2)1/2
(5)
中航工业北京长城计量测试技术研究所研制的双离心机R1=652.737 5 mm,因被校加速度计质心不同,取R2=0.25 mm,各测量不确定度分量如表1,进行幅值测量不确定度计算,计算结果如表1。
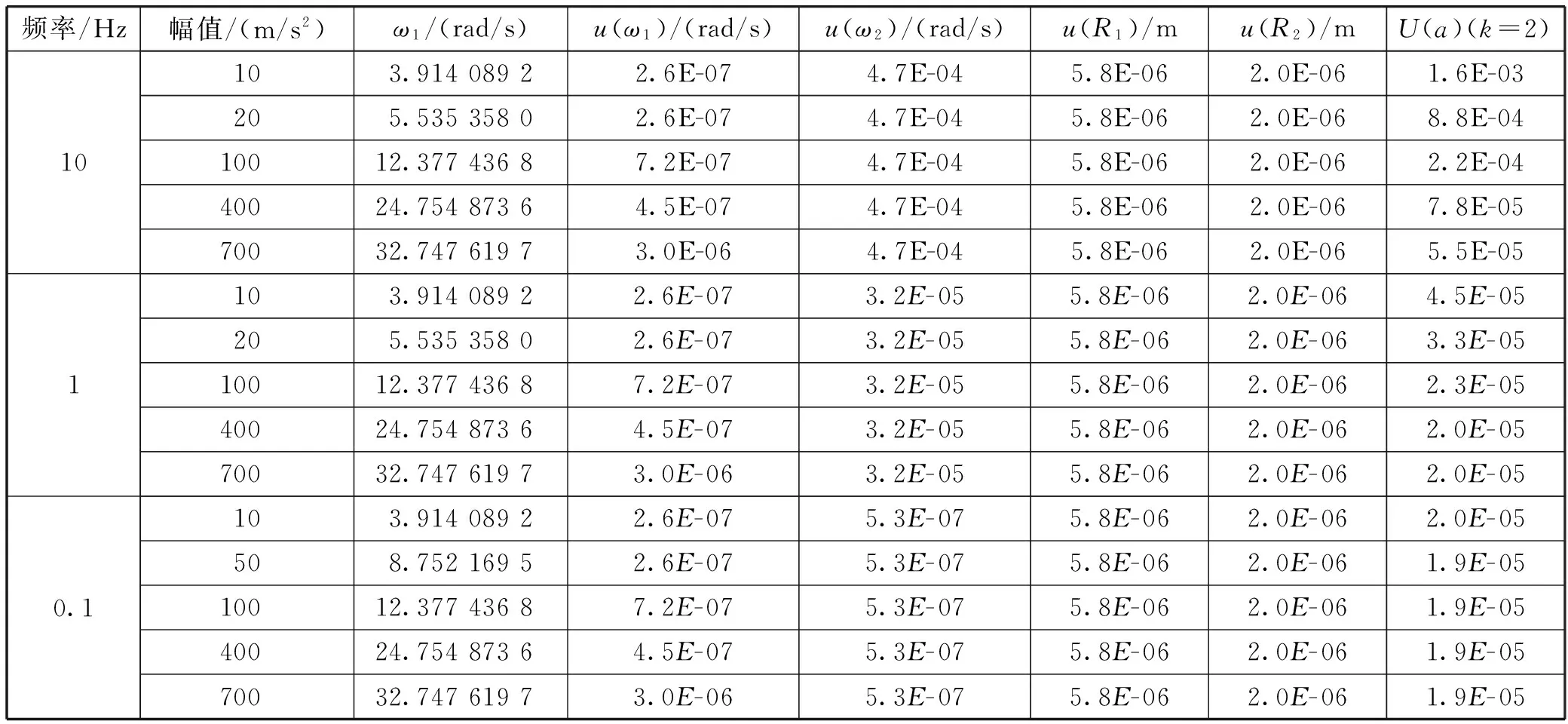
表1 双离心机加速度幅值不确定度
3 微加速度动态校准
3.1 校准设备
微加速度校准装置相当于超低频振动计量标准,该装置是从俄罗斯引进的УСГ-3,它结合了数学摆和低频振动的优点,实现了用数学摆法和微振动法产生标准微加速度,对加速度计进行校准。微加速度校准装置的机械结构如图4所示,它由摆运动系统、线振动系统、机电控制系统、位移测量装置等部分组成。主机是校准装置的关键部分之一,其作用是使被测加速度计产生摆运动或线振动,并测量其运动的加速度。弧形导轨组成摆运动系统的摆动基础,它实现用数学摆法产生标准微加速度;直线导轨组成线振动系统的直线运动基础,它实现用微振动法产生标准微加速度。
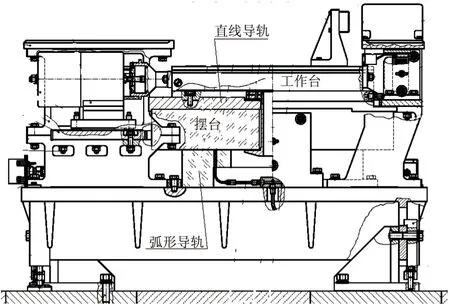
图4 微加速度校准装置机械结构示意图
УСГ-3数学摆台的技术指标如下:
加速度幅值范围:5×10-7~2m/s2;
频率范围:0.001~30Hz;
加速度幅值测量不确定度(m/s2):2×10-7+0.01a,其中a为加速度。
3.2 校准原理
当微加速度校准装置工作在摆运动状态下时,利用数学摆的运动学原理,加速度由微小角度摆动时产生的线振动加速度及在微小角度下重力加速度的分量两部分组成。校准装置的工作平台在振动激励器的推动下,在垂直平面内沿曲率半径R做圆弧往复运动,工作平台在运动方向上的加速度幅值为:
(6)
式中:A为复现加速度的幅值(m/s2);f为振动频率(Hz);X为复现位移的幅值(m);g为当地的重力加速度(m/s2);R为机电系统工作平台的基准面在摆运动下运动轨迹的半径(m)。
从摆运动状态加速度幅值表达式可知,通过该表达式将角位移转换成线位移,即把加速度信号转化成线位移信号。在此情况下具有以下优点,即利用测量线位移的方法来测量小角度信号,由于长度测量手段要比角度测量手段更先进,从而可以更准确的测量,同时半径R越大,相应的线位移幅度就越大。
3.3 幅值不确定度分析

a)振动位移幅度X引入的测量不确定度
b)安装位置的重力加速度g引入的测量不确定度
c)位移测量装置角反光镜中心处的曲率半径引入的测量不确定度

(7)
2)线振动分量A2=(2πf)2X部分
a)振动位移幅度X引入的测量不确定度

测量不确定度分量:c2(X)u(X)=(2πf)2u(X),与加速度幅度有关。
b)振动频率f引入的测量不确定度
测量不确定度分量:c2(f)u(f)=8π2fXu(f),与加速度幅度有关。
线振动分量A2=(2πf)2X的标准不确定度为:
(8)
摆运动模式下加速度幅值的标准不确定度为:
(9)
中航工业北京长城计量测试技术研究所引进的数学摆台其摆运动模式下加速度幅值合成标准不确定度计算结果如表2,表中包含了附加加速度引入
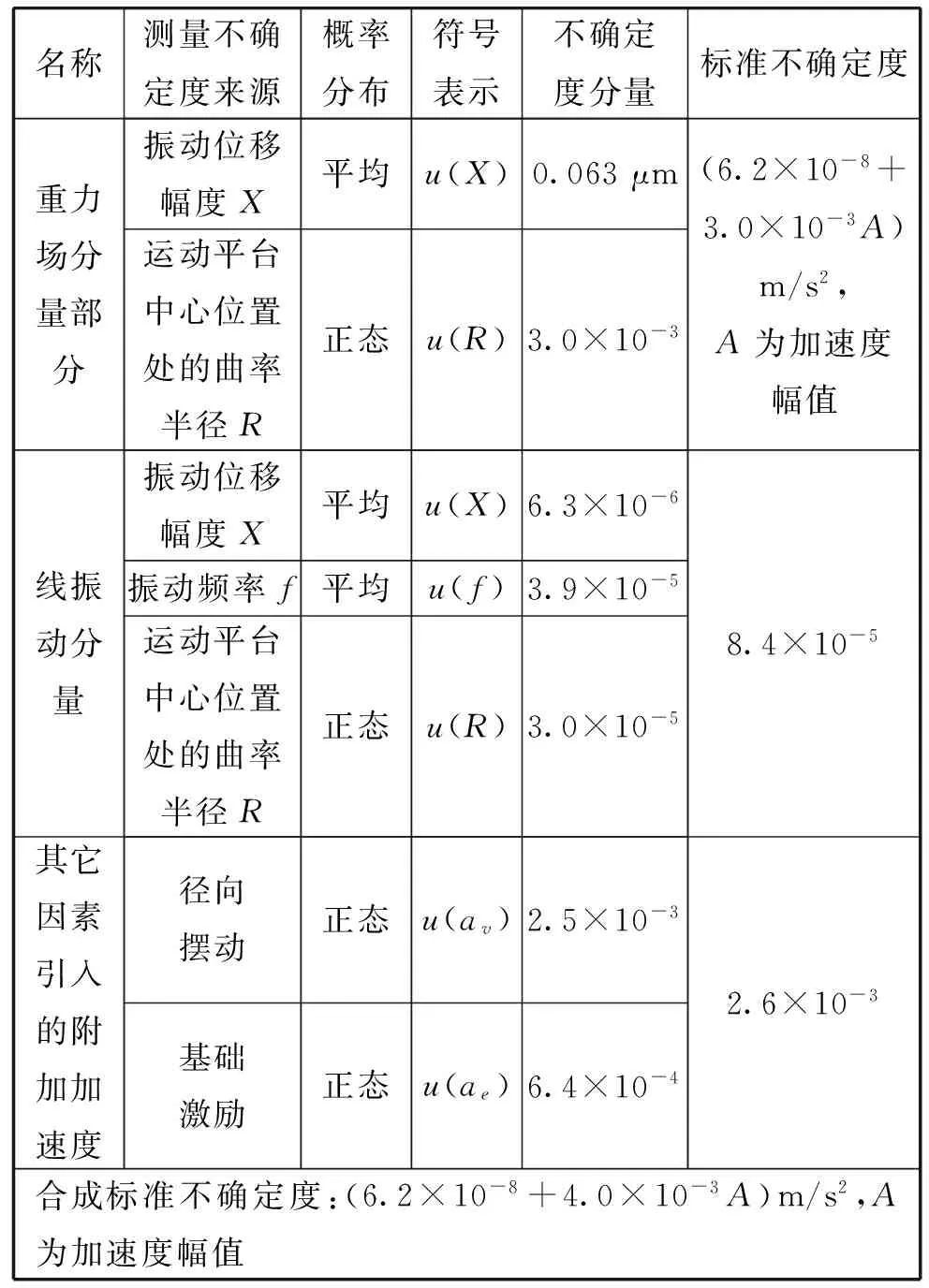
表2 摆运动模式下加速度幅值合成标准不确定度
的不确定度,在摆运动工作模式下,造成附加加速度的因素主要有机电系统的运动平台径向摆动引入的附加加速度和机电系统基础受外界激励引入的附加加速度,它们的大小决定于机电系统的机加工、安装阶段以及校准装置安放的地点、基础隔振情况,其具体量值可通过测量、统计做出评定,与加速度幅度有关。
4 结束语
通过上述三种校准设备,线加速度计动态校准所达到的技术指标如表3所示。
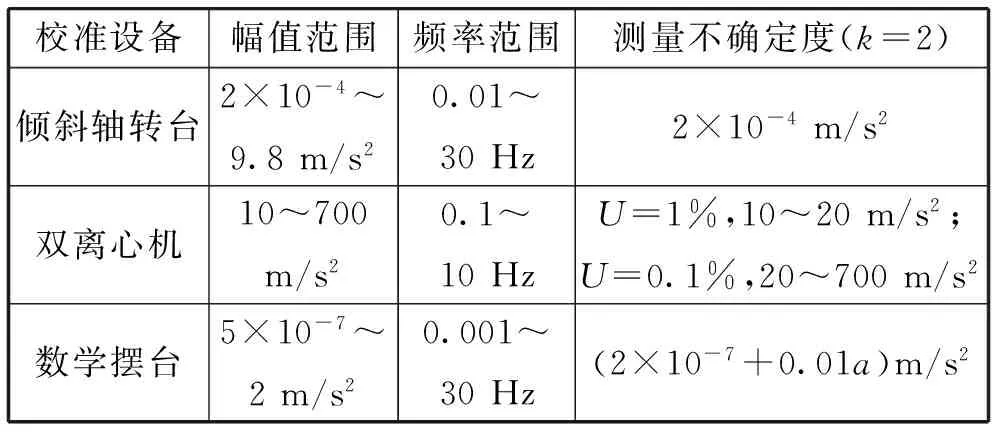
表3 线加速度计动态校准技术指标
由上表数据可以看出,通过倾斜轴转台、双离心机和数学摆台三种校准设备,可以覆盖线加速度计5×10-7~700 m/s2量程范围内的动态校准,如需进一步完善线加速度计动态校准计量技术体系,量程向两端扩展,可考虑基于万有引力法的双球离心机和研制更高量程的双离心机。
[1] IEEE Std 836-2009 IEEE recommended practice for precision centrifuge testing of linear accelerometers [S]. 2009.
[2] 廖建平, 龙祖洪, 徐永, 等. 基于双离心机的正弦加速度数学模型的建立 [J]. 中国惯性技术学报, 2007, 15(2): 252-254.
[3] 高金芳, 杨晓伟, 姜东升. 振动传感器的微加速度动态校准 [J]. 宇航计测技术, 2000, 20(2): 33-41.
The Dynamic Calibration of Linear Accelerometer at Different Range
XIONG Lei1,OUYANG Heng2,LIAO Jianping1,HE Yicai1
(1 Changcheng Institute of Metrology and Measurement, AVIC, Beijing 100095, China;2 No.203 Researsh Insitiute of China Ordnance Industries, Xi’an 710065, China)
In order to achieve dynamic calibration of linear accelerometer, different implementation and calibration equipment will be needed for different range. The paper describes tilt axis table calibration method in gravitational field, the double turntable centrifuge calibration method above the range of 1g and the mathematical pendulum device calibration method under micro acceleration, introduces constitution and principles of various calibration devices, analyses measurement uncertainty of acceleration amplitude. It can be achieved dynamic calibration of linear accelerometer at 5×10-7~700 m/s2range by above calibration devices.
dynamic calibration; linear accelerometer; tilting axis table; double turntable centrifuge; mathematical pendulum device
2014-11-16
熊磊(1976-),男,江西南昌人,高级工程师,硕士,研究方向:惯性器件及系统的校准技术研究。
V249.4
A
