海空无人机的构型设计与气动水动分析*
2015-04-15邢文中
邢文中,蒋 蓁
(上海大学机电工程与自动化学院,上海 200072)
海空无人机的构型设计与气动水动分析*
邢文中,蒋 蓁
(上海大学机电工程与自动化学院,上海 200072)
海空两栖无人机是一种既能在天上飞,又能在水下航行的新型航空航海器,具有很高的研究与应用价值。设计了一种海空无人机的构型,为了研究该构型在飞行与潜水时的可行性,利用Fluent对海空无人机外部构型进行气动和水动特性计算分析。然后根据仿真与分析得到的气动系数与水动力系数得出,所设计的海空无人机外形布局分别符合飞行与水下航行要求,确定了外形布局的可行性,为进一步研究提供理论支持。
海空无人机;构型设计;气动水动特性;计算流体力学
0 引言
未来作战空间将是一体、联合、全维等特点的战场,需要能多空间作战的武器。如果能研制出既能在空中飞行,又能在水底潜行,必要时能迅速潜入水底躲避敌方并且可以突然从水底飞出攻击敌方的武器,对未来的战争将具有重要意义[1-4]。海空两栖无人机是一种既能在天上飞,又能在水下航行的新型航空航海器。
我国对海空两栖无人机的研究较少,在国外研究较为成熟的是美国的潜射飞机,需要借助发射装置才能从水中进人空中。文中设计的海空两栖无人机能够从空中过渡到水面切换模式潜入海里,然后可以从海里上浮至水面切换模式起飞至空中。
文中先采用常规的飞机设计方法确定了无人机的相关参数,然后再结合潜艇设计时涉及的主要参数,确定了海空无人机的外形布局。设计了一种机翼变形机构,使得海空无人机能够在飞行模式与潜水模式之间自由切换运行。为了验证海空无人机外部构型的可行性,文中利用商业CFD软件Fluent对海空无人机外部构型进行气动和水动特性计算分析。
1 海空无人机外形设计
本课题主要把设计的着重点放在飞行和潜水功能的实现上,对其他各项技术指标不做过高的要求。总体构型需要建立在保证飞行要求和潜水要求的基础上,在潜水时需要有较小的阻力和较好的结构强度,在飞行时主要需要有足够大的升力。海空无人机的飞行方式和普通飞机一样是利用机翼来提供升力,水下航行方式是采用水翼提供向下升力的方式来保证它的潜水要求。
由于海空无人机主要活动区域在空中,所以先采用常规的飞机设计方法确定海空无人机的各项与飞行相关的参数,然后再确定潜水过程的各项参数。为了对海空无人机的外部构型进行定量描述,建立相应的坐标系:无人机头部顶端作为坐标原点O,无人机纵轴指向机尾方向为X轴,无人机对称面内垂直X轴且指向无人机上方的为Y轴,垂直于对称面且指向左方的为Z轴。
1.1 飞行模式的模型
相对于飞机外形设计来说,潜艇等水下航行体对外形的要求更高,由于水的密度远大于空气的原因使得水下航行的阻力很大,所以阻力对潜水器的性能起主要限制作用,而限制飞机性能的很大一部分是升力。在潜水器的设计中主体外形有水滴形和过渡形艇型等流线型外形,所以机身选择过渡形艇型外形,机身长11.6 m。
无人机的翼型是构成机翼、尾翼的重要部分[5],它对无人机飞行质量与性能起决定作用。在Profili2.15b经过初步的筛选,选择出小型无人机上比较常用的几种翼型进行对比分析。通过对比分析以上翼型数据,结合潜水无人机水上起降要求以及机翼变形要求等特殊因素,最终选择NACA4412低速高升力翼型。机翼形状参数:翼根弦长为3.2 m,翼尖弦长2.0 m,翼展为12.0 m。
因为翼展变化较大,副翼效果较差,所以采用差动平尾作为横向操纵面。由于V形尾翼可以改善隐身性能与飞机浸润面积[6],尾翼产生的干扰阻力小,而由于将垂尾和平尾合二为一,减轻了结构重量,另外也比普通的垂尾加平尾的简单。
潜水模式时需要采用水翼提供向下升力的方式来保证它的潜水要求,通过对比分析几种翼型数据,选择NACA0012翼型。
1.2 机翼变形机构
海空无人机在空气中飞行时需要相对大的机翼来产生足够大的升力保证飞机飞起来,而潜水时只需要相对很小的机翼就能使海空无人机潜下去。因此模式切换时必须改变机翼的形状,考虑到飞机发展到现在也出现了多种机翼变形方案[7],主要有变后掠翼,伸缩机翼,还有充气机翼。目前运用较多的是变后掠翼机构。后掠翼飞行器两侧机翼实现后掠的驱动结构很多,有连杆式,液压式和曲柄滑块式。连杆机构、曲柄滑块机构因自身重量较轻等优势[8],适合应用到无人机后掠翼的变形机构中。
最终选择滑块摇杆机构,该驱动方式为滑块运动,选择丝杠和大力矩的电机来驱动滑块摇杆机构运动,从而使机翼变后掠。

图1 机翼变形机构原理图

图2 机翼变形前后机构简图
综上建模方法,可以得到海空无人机两种模式下的外部构型。
图3 飞行模式下几何模型

图4 潜水模式下几何模型
2 无人机的气动特性计算与分析
2.1 海空无人机气动性能计算
通过Fluent软件对飞行模式下的海空无人机气动性能进行计算,使用的网格划分工具是Fluent里自带的前处理软件Gambit。由于只计算海空无人机的纵向特性,不分析侧向特性,所以只计算一半模型,这样可以减少计算量[9],提高运算效率。
设置计算域为半圆柱体,纵向长度为无人机长度的10倍,截面半径为无人机横向的5倍,计算域尽可能设置较大,使得计算分析精准。采用非结构网格将流场空间离散化[10]。

图5 计算域

图6 网格化
将无人机的表面除了对称面设置为壁面边界;设置计算域内除对称面与无人机表面外的面为压力远场;由于只计算分析了一半模型,因此对称面为模型截面。
将无人机模型从Gambit导出的网格文件导入Fluent中,采用基于压强的求解器,选用S-A湍流模型,根据飞行高度、速度等已知条件,设置边界条件,选择一阶迎风离散格式[11],设定相应的参考值,计算分析阻力系数、升力系数和俯仰力矩系数,机翼参考面积16.9 m2,平均气动弦长2.65 m,进行迭代计算直至收敛到相应的精度,完成流场计算,可以获得海空无人机在相应条件下的气动特性参数与外流场流动物理量的分布。文中设计的海空无人机工作范围属于低空亚音速。在迎角从0°到30°范围内对海空无人机三维流场进行了分析计算,根据前面对总体参数的估算设置,计算速度范围选择0.1~0.6Ma。
2.2 计算结果分析
经过Fluent迭代计算,得到海空无人机在不同条件下升力系数、阻力系数以及俯仰力矩系数随着攻角的变化,并求出了相应条件下升阻比。

图7 气动特性曲线
在攻角为5°、飞行马赫数Ma=0.3时,海空无人机上下表面压强分布如图8所示。
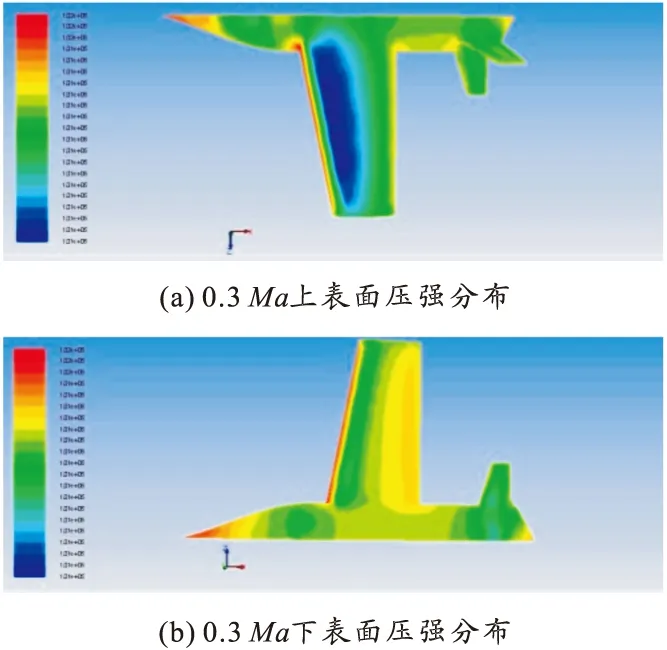
图8 海空无人机表面压强分布
从气动特性曲线图可知,海空无人机在飞行时,随着攻角的增大,升力系数平缓增大,慢慢趋于稳定,与翼型NACA4412变化趋势大致相同,而马赫数的变化并没有引起升力系数的明显变化。攻角在10°以下时,升力系数基本成线性增长,随后攻角的不断增大,升力系数斜率逐渐变小,在攻角为15°时升力系数达到最大值,然后逐渐减小。在攻角较小时,升力系数曲线基本重合,在攻角为15°左右时开始失速。
阻力系数随着攻角增大而增大,在攻角较小时马赫数的变化并没有引起阻力系数的明显变化,基本重合,攻角逐渐增大时阻力系数明显增大。在整个攻角增大的过程中,阻力系数曲线斜率不断增大。
升阻比是研究无人机空气动力性能的重要参数,升阻比越大对飞行越有利,整个攻角变化过程中,升阻比曲线都比较平缓。在攻角为5°左右时,升阻比都达到最大值;在0.3Ma时,升阻比最大,约为8,满足无人机的气动设计要求。
无人机随着攻角的变化,力矩也发生了变化,这对于无人机的稳定性影响较大。而俯仰力矩系数与无人机的俯仰静稳定性有着密切的联系,俯仰静稳定性是指无人机平衡飞行状态受到扰动,攻角发生变化,扰动消失瞬间飞行器恢复原平衡迎角的趋势,图7在中小攻角下,无人机的俯仰力矩系数为负值且趋于稳定,说明无人机在此条件下是静稳定的;当无人机攻角大于18°时,俯仰力矩系数变为正值,无人机则为静不稳定的。
图8是在0.3Ma,攻角为10°时海空无人机上下表面压强分布图。机头的顶部处于高压区。随着攻角的增大,机翼前缘为低压区,在攻角达到10°的时候,机翼前缘形成稳定的低压区,机翼上表面处在低压区,下表面处于高压区,从而形成压力差。
3 无人机的水动特性计算与分析
3.1 海空无人机的水动特性计算
潜水模式的前处理与飞行模式下的前处理相似,只是边界条件有所不同。
将无人机的表面除了对称面设置为壁面边界;计算域的左边界为速度入口边界;计算域的右边界为压力出口边界。由于只计算分析了一半模型,因此对称面为模型截面。
基于有限体积法控制方程的离散格式,采用RNGκ-ε湍流模型和标准的壁面函数,运用STMPLEC方法计算压力速度关联方程,离散的代数方程用逐点Gauss-Seidel迭代法求解。扩散项采用中心差分格式离散,动量运用二阶迎风格式离散;湍动能、湍动耗散率和特殊耗散率运用一阶迎风格式离散,压力插值运用标准方式。由于网格单元采用了四面体,网格化后显示多数网格歪斜度在0.7以下,因此网格质量较高,计算时可以设置较大的欠松弛因子提高运算时间。
3.2 计算分析
经过计算,得到无人飞行器在潜水模式下,在速度入口来流速度分别为1 m/s、3 m/s、5 m/s时,在不同攻角下的升阻力系数及升阻比变化曲线如图9所示。
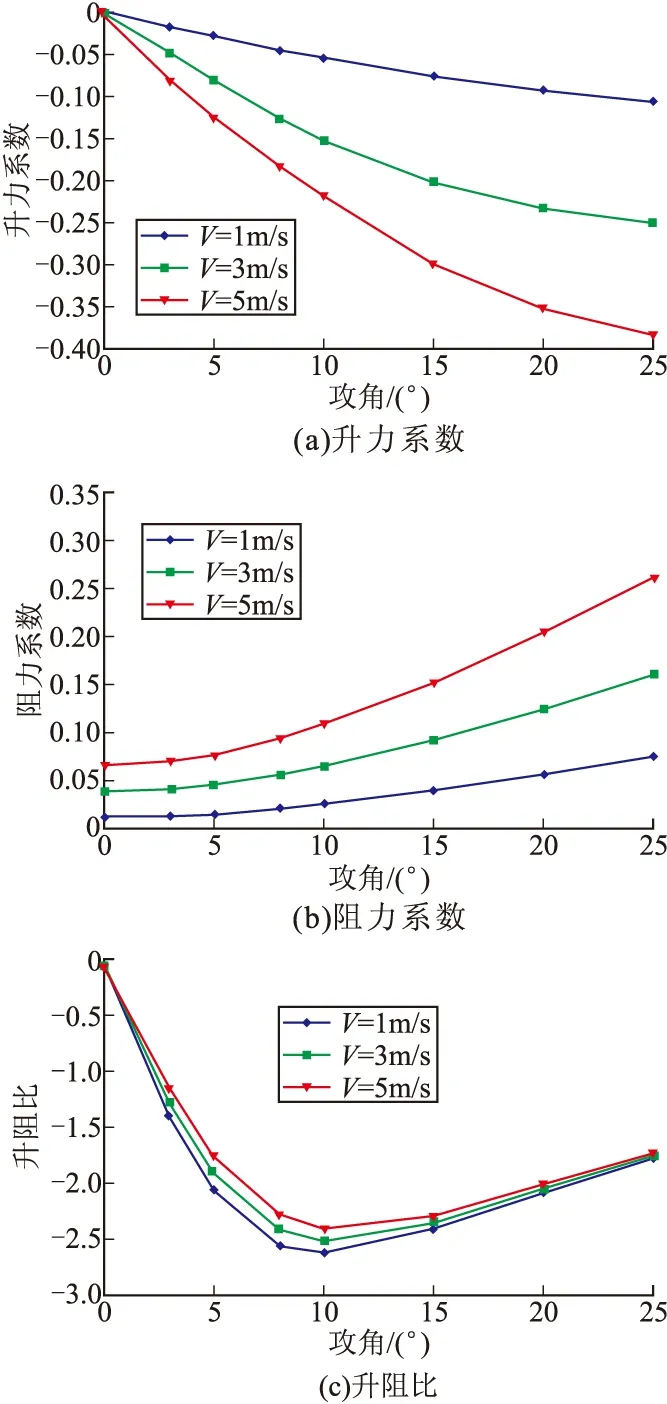
图9 水动特性曲线
通过观察阻力系数曲线可知,0到20°攻角的情况下,阻力系数可以近似为抛物线分布。攻角越大,则阻力系数越大。升力系数在小攻角的情况基本是线性增加的。在0°~10°攻角的范围内,升阻比随着攻角的增加逐渐增加。
通过对无人机潜水模式壁面压力的数值预报,可以发现在无人机的头部、尾翼的前端面压力均比较大,从而掌握了无人机上一些显著地方的壁面压力分布情况。
4 结论
文中完成了海空无人机构型设计与一种能够在两种模式下自由切换的机翼变形机构,通过对简化模型进行气动、水动特性计算分析,得出:
1)在海空无人机的概念设计阶段中,对其构型进行了气动与水动特性计算分析,能够为以后的设计方案选择与论证提供有效的理论支持;
2)运用CFD数值模拟技术很好的预报了无人机潜水时的阻力系数,壁面压力分布,而这些都为无人机潜水快速性和艇型优化提供了非常好的参考。
[1] 吴立新, 刘平生, 卢健. 无人机分类研究 [J]. 洪都科技, 2005(3): 1-11.
[2] 丁力军, 胡银彪. 无人驾驶飞机的发展现状与趋势 [J]. 飞航导弹, 1999(10): 9-10.
[3] 崔秀敏, 王维军, 方振平. 小型无人机发展现状及其相关问题分析 [J]. 飞行力学, 2005, 23(1): 14-18.
[4] 许智辉, 李执力. 无人机武器化趋势及其对未来战争的影响 [J]. 飞航弹, 2004(6): 44-46.
[5] 张铁军, 邵箭. 飞机设计手册: 第5册 民用飞机总体设计 [M]. 北京: 航空工业出版社, 2005: 56-73.
[6] Oliver J A, Kosmatka J B, FarrarCharles R, et al. Development of a composite UAV wing test-bed for structural health monitoring research [C]∥ Proceedings of SPIE, Vol. 6532. 2007.
[7] Charles Frederick Toms, Luton. Aeroplanes having wings capable of adjustment in sweep [P]. USA, Utility Patent 3206126. 1963.
[8] Dethman, Herman A. Bearing arrangement for variable sweep wing aircraft [P]. USA, Utility Patent 3279721. 1966.
[9] Magdi Rizk, Bruce Jolly. Aerodynamic simulation of bodies with moving components using CFD overset grid methods, AIAA 2006-1252 [R]. 2006.
[10] 李鹏飞, 徐敏义. 精通CFD工程仿真与安全实战 [M]. 北京: 人民邮电出版社, 2010: 86-108.
[11] Versteeg H K, Malalasekera W. An introduction to computational fluid dynamics: the finite volume method [M]. New York: Wiley, 2007: 243-266.
Configuration Design and Aerodynamic and Hydrodynamic Performance Analysis of Sea-air Unmanned Aerial Vehicle
XING Wenzhong,JIANG Zhen
(School of Mechatronic Engineering and Autonation, Shanghai University, Shanghai 200072, China)
Amphibious air-sea UAV is an aviation and navigation device which can not only fly in the sky, but also navigate under water, and it has great research significance and application value. A structure of amphibious air-sea UAV was designed. The aerodynamic and hydrodynamics performances of UAV were analyzed with Fluent software to prove its feasibility. As results were analyzed, the calculated data could show the aerodynamic and hydrodynamic coefficient. As a result, the configuration of UAV could satisfy flying and diving quality with favorable aerodynamic and hydrodynamic performances, and it is confirmed that the UAV’s shape structure is feasible and provides theoretical support for further research.
UAV; structural design; aerodynamic and hydrodynamic performance; CFD
2014-07-25
国家自然科学基金(61175092)资助
邢文中(1990-),男,江苏滨海人,硕士研究生,研究方向:无人机概念设计与计算流体力学。
V211.5
A
