多源检测器的交通数据融合研究
2015-04-13董宏辉单庆超
史 岩, 董宏辉, 张 瑜, 单庆超, 刘 锴
(1.北京交通大学交通运输学院,100044 北京; 2.北京市城市交通信息智能感知与服务工程技术研究中心, 100044 北京)
多源检测器的交通数据融合研究
史 岩1,2, 董宏辉1,2, 张 瑜1, 单庆超1,2, 刘 锴1,2
(1.北京交通大学交通运输学院,100044 北京; 2.北京市城市交通信息智能感知与服务工程技术研究中心, 100044 北京)
为缓解城市交通拥堵、实时反映城市的交通状况,需要通过获取路网交通流参数来获取交通状态. 随着对交通流速度数据需求的全面性、有效性、准确性要求的提高,由某一种检测器获取的速度数据已经满足不了实际需求. 利用信息融合技术将多源检测器采集到的交通流数据进行处理,应用数据神经网络法、回归分析法对数据进行融合,得到更加丰富且质量更高的交通信息,从而在交通运营管理中为决策者提供有效的数据支持. 通过对本文提出的交通流参数获取技术及数据融合方法进行验证,本文的方法可行,结果可信.
数据融合; 神经网络法; 回归分析; 多源数据
0 引言
随着汽车保有量的提升,城市交通拥堵状况也日益严重[1]. 通过获取交通状态,能够反映城市交通的实时状况. 交通流速度是最能反映交通流特性且较容易获得的一个交通流参数. 通过使用检测器获取交通流速度能很好地反映交通状态,从而为交通管理者提供可靠的参考数据[2]. 多源检测器的交通信息经过数据融合以后能得到更加真实可靠的交通信息,为交通运营管理提供有力的支持.
为了更好地服务于交通管理、控制和诱导,多检测器对交通流速度进行检测已成为必然. 利用信息融合技术将多源检测器采集到的交通流速度数据用数据融合的方法得到更加丰富且高质量的交通信息,提高交通的机动性、安全性和有序化.
数据融合的加工对象是不同来源的速度数据,而数据融合的核心则是数据的协调优化和综合处理. 在交通流速度采集中进行融合是十分必要的,这是数据融合的优点,是智能交通系统的关键技术和交通流速度的特点共同决定的. 数据融合技术通过对不同来源交通数据的综合处理可以获得更加准确的交通信息.
作为中心城市范围内道路网主骨架,北京城市快速路网系统无红绿灯,尽管其长度在城市路网总长度所占比例仅为8%,但未来承担的日机动车交通量至少可占城市总交通量的50%[3]. 在北京市,快速路的发展,在城市交通运行中承担了重要的功能,其运行质量,也将直接影响北京市总体路网的运行状态,快速路的供给能力是由快速路交通流特性所反映,不管在交通规划中抑或日常交通管理控制当中,如何正确分析判断快速路的交通流特性,将决定城市交通网络运行状态.
1 数据融合模型
1.1 B- P模型
B- P算法的优点:研究理论成熟、具有严谨的推导过程、容错能力强、通用性好,目前为止是前向网络学习的主要算法. B- P算法的缺点:1)学习效率低,训练次数多,收敛速度慢,样本维数的增加会使得网络性能变差;2)属于贪婪算法,特别容易形成局部最小,致使得不到全局最优;3)网络中隐节点的选取缺乏理论支持;4)在训练过程中,学习新加入的样本有遗忘以前学习过的样本的趋势[4-5].
在应用B- P模型解决实际问题中,可以通过较好的数据归一化方法来尽量避免出现不收敛或收敛慢的情况,也能在很大程度上改善网络的性能.
1.2 基于线性回归的速度融合方法
回归分析是确定一个或几个变量的变化对另一个特定变量的影响程度或相互依赖的定量关系的一种统计分析方法. 在本文中即是研究来自同一截面的浮动车速度数据和微波速度数据(自变量)与旅行时间速度数据(因变量)之间的数量关系,并用回归方法表述出这种关系.
1.3 二元回归模型与回归方程
设2个自变量分别为x1、x2,因变量为y,描述因变量与自变量和误差项ε之间关系的方程称为二元回归模型[6]. 其一般形式为
y=β0+β1x1+β2x2+ε
(1)
式中,β0、β1、β2是模型的参数;ε为误差项.
式(1)表明:y为x1、x2的线性函数与误差项ε的和. 误差项ε反映了除自变量之外的随机因素对y的影响,是不能由自变量与因变量之间的线性关系所解释的变异性.

(2)

1.4 参数的最小二乘估计


(3)
2 北京网络数据获取与预处理
本文主要是以快速路的1个牌照识别检测器路段1个方向“光辉南里小区—三块板村”数据进行研究和分析的.
北京市快速路交通流检测器主要是指微波检测器和牌照识别检测器,根据统计得知,快速路中共有微波检测器829个,牌照识别检测器231个.
2.1 融合和预测时段的选择
本文通过3个时段早高峰、平峰和晚高峰对全天的交通流速度数据进行融合和预测.
要研究3种检测器速度的融合,对于某一天的数据,3种检测器的数据必须都得存在,按照这种原则对从北京市交管局调取的数据进行筛选,找到符合条件的只有2011年6月20日、21日、22日的数据比较适合. 因为牌照识别检测器存在大量数据的缺失,以其为选择依据得到可用于融合和预测的早高峰、平峰和晚高峰的数据. 这3个时段的数据分别为早高峰模型预测利用2011年6月22日5:00—10:00的数据,模型验证用10:00—11:00的数据;平峰的模型预测用2011年6月20日12:00—17:00的数据,模型验证用17:00—18:00的数据;晚高峰的模型预测用2011年6月22日15:00—20:00的数据进行训练,模型验证利用20:00—21:00的数据.
2.2 原始数据的获取
本文主要对牌照识别检测器路段光辉南里小区—三块板村的数据进行融合.
所用到的数据包括浮动车检测器数据、微波检测器数据和牌照识别法检测器数据,均来自北京市交通管理局数据库. 在选择数据方面,本文在力求数据完整性的基础上,以牌照识别检测器数据量足够大为依据,进行数据的筛选. 在数据时间选择方面分别单独地进行高峰期和平峰期的数据融合.
本文所研究的路段是通惠河北路高速公路在光辉南里小区和三块板村之间的一段,在该路段内,通惠河北路高速公路与东三环快速路进行立体交叉. 选择研究该路段的主要原因是,一方面该路段固定检测器的覆盖长度能得到保证,另一方面,该路段上的浮动车样本量也能得到满足. 因为经过快速路原始数据比选之后认为该路段牌照识别检测器数据量相对比较充分,以保证下面的融合能顺利地进行. 数据的属性如表1所示.

表1 调查路段时间及路段组成表
获取数据及整理数据的方法:
1) 要求是浮动车的数据量比较大、牌照识别检测器数据缺失比较少的路段,按照此要求找寻路段.
2) 为了使路段的速度更加接近真实值,反映实时路况状态,对不同类型检测器基本时间间隔内的数据进行不同的处理:把同一方向不同浮动车路段的速度以流量的倒数为权进行加权平均等效到牌照识别检测器路段上;把线圈检测器检测到的不同车道的速度以流量的倒数为权值加权到检测器所检测的所有车道的平均速度获得检测器处的平均速度,然后把同一方向不同检测器处的平均速度以其对应的流量的倒数为权值进行加权平均到牌照识别检测器路段上;把以基本时间间隔2 min内的旅行时间速度剔除坏值之后进行平均. 图1是所要研究快速路段在百度地图上的截图. 图2为研究路段的检测器分布情况.

图1 快速路路段(光辉南里小区—三块板村)

图2 路段检测器分布
2.3 数据预处理
本论文所进行的数据融合以及分析均以2 min为基本数据时间间隔.
2.3.1 微波数据预处理
微波检测器获得的原始数据主要包括:流量、车道编号、时间占有率、速度等. 本论文所研究的路段“光辉南里小区—虹景大厦—三块板村”,是以牌照识别法为基本单位的路段. 它包括以车道分类的编号为23005和23006的微波检测器. 微波数据的预处理需要按2步进行。
第1步:获得以2 min为时间间隔的分检测器的各车道速度的加权平均速度数据.

l=23 005, 23 006
(4)

第2步:获取以2 min为时间间隔的等效到牌照识别法路段的加权平均速度.
以微波检测器处的流量的倒数为权值对2个检测器处的平均速度进行加权等效到路段(光辉南里小区—三块板村). 处理方法如下:
i=1,2,…,nl(i=11,…,nl);l=23 005, 23 006
(5)
2.3.2 浮动车数据预处理
平均流量、平均速度、平均占有率为本文获取的浮动车原始数据. 其数据特征是已经经过标准化处理为间隔为2 min的数据.
本论文所研究的路段“光辉南里小区—三块板村”,是以牌照识别法为基本单位的路段. 它按车流方向分为3个浮动车路段,其中“光辉南里小区—三块板村”方向的3个浮动车路段编号分别为8656、9662和9663.
(6)
2.3.3 牌照识别检测器数据预处理
牌照识别检测器获得的原始数据主要包括:车辆入口时间和出口时间,结合路段长度可求得路段平均速度. 其数据特征是未经过标准化处理为2 min时间间隔的数据.
本论文所研究的路段“光辉南里小区—三块板村”,即是以牌照识别法为基本单位的路段.
其数据预处理方法为以α=0.05的置信度对1个单位时间间隔(2 min)内的数据进行大偏差值剔除,然后对剩下的数据进行平均得到2 min时间间隔内的旅行时间数据.
因为获得的2 min之内的数据一般少于20个,是小样本,可以认为服从自由度为nk-1(nk为第k个时间间隔内旅行时间数据的样本量)的t分布,即Vki~t(nk-1). 在显著性水平为α=0.05的条件下可以求得旅行时间速度的置信区间.
第k个时间间隔内的平均速度
(7)
第k个时间间隔内速度的置信区间
(8)
处于置信区间范围内的速度数据应予以保留,处于置信区间外的速度数据应予以剔除.
3 实例分析
3.1 用B- P神经网络法进行融合
本文的模型训练根据研究时段的不同分为2部分:高峰期和平峰期. 其中高峰期又分为早高峰和晚高峰. 共进行3次模型训练以及3次的有效性判断. 考虑到路段平均速度可能与流量的早高峰和晚高峰一定程度地错开,模型的求解均在流量早高峰和晚高峰的基础上向前推进1 h,往后推进2 h. 也就是说进行模型训练的数据时间为5 h,进行验证的数据时间为1 h.
考虑到速度和流量高峰时期的非重合性,早高峰利用2011年6月22日5:00—10:00的数据进行训练,10:00—11:00的数据进行验证;平峰利用2011年6月20日12:00—17:00的数据进行训练,17:00—18:00的数据进行验证,晚高峰利用2011年6月22日15:00—20:00的数据进行训练,20:00—21:00的数据进行验证.
早高峰时段融合和预测结果分别如图3、图4所示.

图3 早高峰训练结果
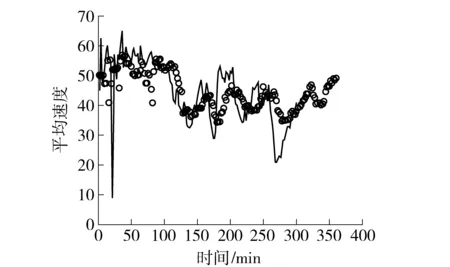
图4 早高峰预测结果
同时,通过对早高峰、平峰以及晚高峰数据进行训练及预测,并将预测融合值与准确值进行比较,如表2所示. 表2是融合值与浮动车数据、微波检测数据的比较. 通过表2能够得出:
1) 融合值LSE均小于浮动车LSE与微波检测器LSE,因此能判定模型有效.
2) 浮动车LSE与融合值LSE的差值小于微波检测器LSE与融合值LSE的差值,这说明浮动车检测器较微波检测器在速度检测方面较精确. 其原因可能是对于整个路段,微波检测器只是检测了2个点的平均速度,对整个路段平均速度的代表性不强;而浮动车检测器检测的浮动车基本均匀分布在路段上,检测获得的是沿着路段方向多个点的平均速度,对路段平均速度的代表性更强.
3) 对早高峰、平峰期与晚高峰3个时段LSE进行比较,得出在平峰期检测数据较高峰时期检测数据准确度更高.
4) 从融合的效果上分析,平峰时期比高峰时期的融合效果更好.
3.2 回归分析法进行数据融合
以牌照识别检测器速度为因变量,浮动车速度和微波检测器速度为自变量建立回归方程.
1) 早高峰利用2011年6月22日5:00—10:00的数据进行回归,得到的回归方程
y=15.823 89+0.552 847x1-0.005 97x2
由于significanceF=1.39×10-16<α=0.05,说明线性关系显著.
2)平峰利用2011年6月20日12:00—17:00的数据进行回归,回归方程
y=60.134 48-0.131 27x1-0.016 01x2
由于significanceF=0.022 544<α=0.05,说明线性关系显著.
3)晚高峰利用2011年6月22日15:00—20:00的数据进行回归,回归分析方程
y=44.127 53-0.088 128x1-0.009 443x2.
由于significanceF=0.017 131<α=0.05,说明线性关系显著.
通过对早高峰、平峰以及晚高峰数据进行训练以及预测,并将预测融合值与准确值进行比较,比较结果如表3所示.

表3 快速路两检测器及融合值的LSE比较
1) 融合值LSE均小于浮动车LSE与微波检测器LSE,因此能判定模型有效.
2) 浮动车LSE与融合值LSE的差值小于微波检测器LSE与融合值LSE的差值,这说明浮动车检测器较微波检测器在速度检测方面较精确.
3) 对早高峰、平峰期与晚高峰3个时段LSE进行比较,得出在平峰期检测数据较高峰时期检测数据准确度更高.
4) 从融合的效果上分析,平峰时期比高峰时期的融合效果更好.
由以上分析可得,神经网络方法和线性回归方法得到同样的结果,2种模型均通过有效性检验,取得良好的效果.
5 结束语
本文对神经网络融合模型和二元回归模型进行了深入的研究,基于这2种模型对北京市快速路段交通流的早高峰、平峰和晚高峰3个时段进行了验证. 在模型的有效性判断中,融合值LSE均小于浮动车LSE与微波检测器LSE,平峰时期的速度融合值较真实值更加接近. 同时,浮动车LSE与融合值LSE的差值小于微波检测器LSE与融合值LSE的差值,说明浮动车检测器较微波检测器在速度检测方面较精确. 设计2种模型对路段速度值进行预测,均取得较好的效果,无论高峰期还是平峰期,融合值与准确值之间的LSE均小于单元检测器与准确值之间的LSE值.
[1] 范斐斐. GPS中频信号处理及其FPGA实现[D]. 上海: 上海交通大学, 2007.
[2] 于厚钢. 高动态GPS卫星信号模拟器的基带数字信号处理实现[D]. 北京: 北京邮电大学, 2009.
[3] 郭利, 张锡恩, 马彦恒. 模糊数据融合算法在设备状态监测中的应用[J]. 传感器技术, 2004, 23(6): 73-75, 80.
[4] 胡郁葱, 徐建闽. 基于BP神经网络的车辆定位融合模型[J]. 华南理工大学学报, 2004, 32(2): 46-49.
[5] Keechoo Choi, Youn-Shik Chung. Travel time estimation algorithm using GPS probe and loop detector data fusion[CD]. Washington D. C: 80th Transportation Research Board Annual Meeting, 2001.
[6] Klein L A, Yi P’, Teng H L. Decision support system for advanced traffic management through data fusion[C]. Transportation Research Record, 2002: 173-178.
[7] 贾俊平, 何晓群, 金勇进. 统计学[M]. 4版. 北京: 中国人民大学出版社, 2009.
[8] 刘智勇, 李水友. 基于信息融合技术的交通量检测方法[J]. 公路交通科技, 2003, 20(2): 81-84.
[9] 刘亮平. 基于多源检测器的交通信息融合方法研究[D]. 北京: 北京交通大学, 2010.
[10] John N. Neural network representations for arterial Street incident detection data fusion[J]. Transportation Research Part C: Emerging Teehnologies, 1997, 5(2-3): 245-254.
[11] 曲晓慧, 安钢. 数据融合方法综述及展望[J]. 舰船电子工程, 2003(2): 2- 4, 9.
Multi-source Traffic Detector Data Fusion Research
SHI Yan1,2, DONG Hong-hui1,2, ZHANG Yu1, SHAN Qing-chao1,2, LIU Kai1,2
(1.School of Traffic and Transportation, Beijing Jiaotong University, Beijing 100044, China;2.Beijing Engineering Research Center of Urban Traffic Information Intelligent Sensing and Service Technologies, Beijing 100044, China)
In order to alleviate urban traffic congestion, it is necessary to obtain roadway network traffic flow parameters to estimate the traffic conditions. Single-detector data may not be sufficient to obtain a comprehensive, effective, accurate and high quality traffic flow data. The neural network and regression analysis data fusion methods are employed to expand data sources as well as improve data quality. The multi-source detector data can provide foundamental support for traffic management. An empirical analysis is conducted using Beijing urban expressway traffic flow parameters acquisition technology. The results show that the proposed data fusion method is feasible and can provide reliable data sources.
data fusion; neural network method; regression analysis; multi-source data
10.13986/j.cnki.jote.2015.03.008
2015- 03- 27.
国家科技支撑计划课题(2014BAG01B02).
史 岩(1980—), 女, 工学学士, 助理工程师, 研究方向为交通管理, E-mail:buchidou@163.com.
X 951
B
1008-2522(2015)03-35-06