舰载无人机双机无源定位有效区分析模型
2015-04-11谭安胜朱青松王新为尹成义
谭安胜, 朱青松, 王新为, 尹成义
(海军大连舰艇学院,辽宁 大连 116018)
从作战使用的角度考虑,依据装备性能特点,从舰载无人机双机水平侦察范围、双机精测向区分析入手,构建了双机可定位区、双机有效精定位区、双机有效精定位区最大内接矩形模型;分析了双机有效精定位区与等圆概率误差曲线之间的关系,通过仿真计算得出了实用结论;为驱护舰编队作战中使用舰载无人机进行双机无源定位时搜索力的优化配置提供了决策依据。
0 引言
舰载无人机双机定位基线的几何特性对定位精度有很大影响。通常两架舰载无人机具有相同的测向精度,基线离目标越远,相应的目标区域(定位模糊区)就越大[1]。由此可发现,随着目标与基线之间距离的增大,方位线(Line of Bearing,LOB)会变得越来越平行(LOB 之间的交会角越来越小),这种影响称为几何精度衰减,常用几何精度因子(Geometric Dilution of Precision,GDOP)表示[2-4]。当目标偏离基线的中垂线时,定位精度也会因GDOP 而降低。当目标位于基线延长线上时,测得的LOB 就变得线性相关(它们是共线的),定位精度会迅速降低。为此,为了减小几何定位精度的不利影响,可以使用不同的接收路径。典型地,要尽可能使LOB 成近似垂直交叉,尤其当各平台的误差相同时。但LOB 成近似垂直交叉时,辐射源离基线的距离很近,要想使水面舰艇编队得到早期情报,舰载无人机必须前出很远或拉大基线长度,这在实战中是很难保证的[5]。为此,必须对双机无源交叉定位时的有效定位区进行分析,然后研究满足最大有效定位区要求的舰载无人机机动策略,进而根据战场态势和目标分布范围,研究舰载无人机接敌航线的确定方法、舰载无人机侦察飞行区域的确定方法、舰载无人机侦察飞行方式、方法等搜索力优化配置问题。本文立足于作战使用的角度,依据装备性能特点,从舰载无人机双机水平侦察范围、双机精测向区分析入手,对舰载无人机双机无源定位有效区进行论证研究,为舰载无人机双机无源定位时搜索力的优化配置提供依据。
1 基本假设
1)两架舰载无人机具有相同的机位误差和测向误差;
2)两架舰载无人机由同一载舰控制时,其最大可控距离分别为d1,d2,且d1>d2;
3)两架舰载无人机由不同载舰控制时,探测信息可由指挥控制中心统一处理,其最大可控距离分别为d1,d2,且d1>d2或d1=d2。
2 双机无源定位有效区模型建立
2.1 双机水平侦察范围
舰载无人机电子侦察载荷,一般都可以在360°范围内进行全向侦察,测量敌方无线电信号的技术参数。两架舰载无人机的最大水平侦察范围如图1 所示。
图1 中:U1,U2分别为两架舰载无人机(或单架无人机不同时刻)在水平面上的投影点;r1,r2分别为两架舰载无人机的最大水平探测距离;r01,r02分别为两架舰载无人机的水平侦察盲区半径。显然,两架无人机能够协同定位的区域,一定是两架舰载无人机侦察区域的交叠区域,称之为侦察交叠区。那么,是不是在侦察交叠区内的辐射源目标都能被精确测向呢?下面做进一步的分析。
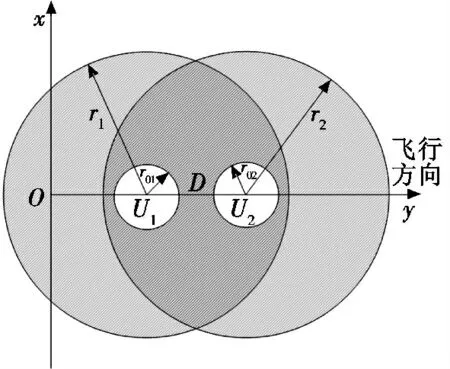
图1 双机水平侦察区示意图Fig.1 Sketch map of dual-UAV horizontal reconnaissance scope
2.2 双机精测向区
通常,舰载无人机的精测向天线阵安装在机身两侧,多采用一维多基线相位干涉仪体制,精测向范围为机身两侧各ω 范围内,且关于机翼呈轴对称分布。由于测向精度决定定位精度[6-8],因此,对辐射源进行定位时,应使用精测向区进行测向。舰载无人机双机精测向区如图2 所示。
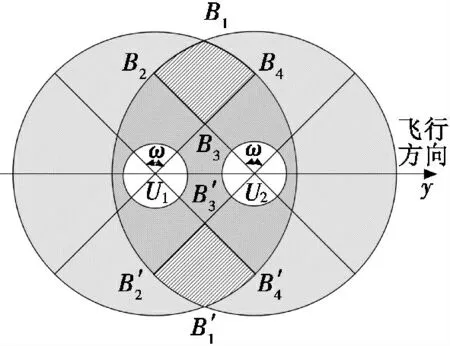
图2 双机精测向区示意图Fig.2 Sketch map of dual-UAV precise direction-finding zone
图中:B1B2B3B4和B1'B2'B3'B4'所围成的区域为双机精测向区;B3U1U2和B3'U1U2围成的三角形区域为精测向盲区;精测向边缘线B3B4(或B2B3)与y 轴的夹角α =
2.3 双机可定位区
根据文献[1]可知,舰载无人机挂载电子侦察载荷对辐射源目标进行双机无源定位时,为满足实际作战要求,在进行兵力部署时交会角一般应控制在30° ~150°范围内。如图3 所示,分别以U1,U2为圆心,以半径为基线D 画弧分别交于O,O'点,再分别以O,O'点为圆心,以基线D 为半径画圆,显然△OU1U2为等边三角形。

图3 双机可定位区分析示意图Fig.3 Sketch map of dual-UAV feasible locating area
在圆O、圆O'中,弧U1U2所对的圆心角为60°,根据圆周角定理,图3中实线圆弧上的点所对的圆周角为30°,虚线圆弧上的点所对的圆周角为150°,显然,图中阴影部分上的点与无人机连线的夹角为30° ~150°,则圆O、圆O'称为可定位圆,圆O、圆O'中阴影部分即为双机可定位区,位于可定位区内的目标定位线交角为30° ~150°。虚线圆弧是双机两侧形成的可定位圆的短弧线部分,在两条短弧线所围成的弓形区域内不能实施准确定位,称为无效定位区。
显然,两架无人机的有效可定位区是可定位区与侦察交叠区的交集,两架无人机的有效精定位区是有效可定位区与精测向区的交集。
2.4 双机有效精定位区
为了便于研究问题,假设两架舰载无人机的最大水平探测距离r1=r2=r,水平侦察盲区半径r01=r02=r0。由于舰载无人机飞行高度有限,通常r0较小,精测向范围ω 一定,所以,在既定条件下,有效精定位区可由图4 给出。
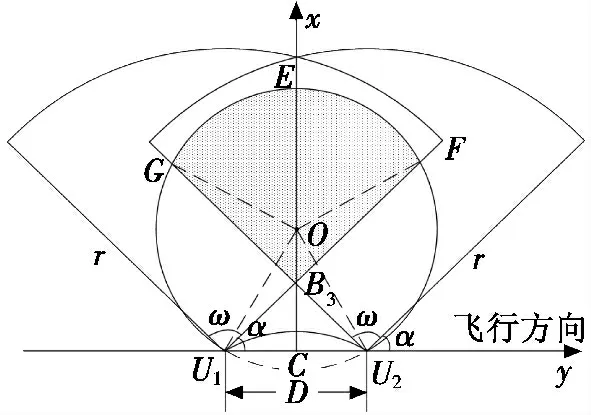
图4 双机左侧有效精定位区分析示意图Fig.4 Sketch map of left side of dual-UAV effective precise locating area
由2.3 节的分析可知,△OU1U2为等边三角形,则∠OU1U2= 60°,

在△OU1F 中,

则△OB3F 的面积为

又∠EOF =180° - ∠FOB3=150° -2α,则扇形OGEF 的面积为
所以,当D≤r/2 时,有效精定位区,即图5 中阴影部分的面积为

有效精定位区域距离基线的最近距离为

有效精定位区域距离基线的最远距离为

有效精定位区域的最大宽度为

有效精定位区域的最大纵深为
假设某舰载无人机的最大水平探测距离为200 km,精探测区为机身两侧各90°范围内,当两架舰载无人机采用单纵队间距100 km 协同进行侦察飞行时,应用上述公式计算得:有效精定位区的最大宽度约为182 km、最大纵深约为136 km、最大面积约为12 050 km2、距离基线的最近距离为50 km、距离基线的最远距离为186 km。
由以上分析可以看出:
1)当D≤r/2 时,随着基线D 的增加,有效精定位区面积逐渐增大,当D =r/2 时,可定位区域圆与最大水平侦察距离r 对应的弧线相切,此时有效精定位区面积达到最大值;
2)当D >r/2 时,随着基线D 的增加,有效精定位区面积逐渐减小,当时,有效精定位区面积为零。
3 双机有效精定位区最大内接矩形
为了研究舰载无人机搜索力的有效配置问题,需要进一步研究有效精定位区的最大内接矩形。设精定位区的任意内接矩形的横向宽度为AD,纵深为BD,该内接矩形与基线的最小垂直距离为dD。需要确定当AD,BD及dD为多大时,能使内接矩形的面积达到最大的问题。根据基线长度D 与无人机最大探测半径r 之间的大小关系,下面分两种情况进行分析[9-10]。
1)当D≤r/2 时。
如图5 所示,abcd 为精定位区的一个内接矩形,其中,ad∥U1U2,ad =AD,ab=BD,ad 边到基线的垂直距离为dD,基线U1U2的中垂线为ef。

图5 当D≤r/2 时,双机有效精定位区最大内接矩形Fig.5 Max inscribed rectangle in dual-UAV effective precise locating area when D≤r/2
在Rt△U2dg 中,有

则
将式(12)代入式(10),可得
解该二次方程,并保留正数解,得到BD的长度为
为保证内接矩形的面积大于0,应满足min(AD,BD)>0,根据式(12)、式(14)可得,D/2·tan α <dD<3D/2·tan α。内接矩形的面积SADBD可表示为

2)当D >r/2 时。
如图6 所示,在Rt△U2cg 中,

则有

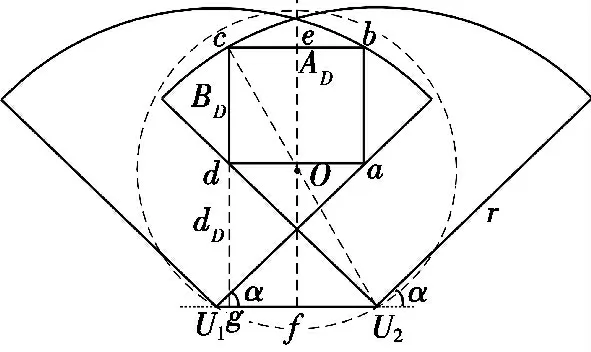
图6 当D >r/2 时,双机有效精定位区最大内接矩形Fig.6 Max inscribed rectangle in dual-UAV effective precise location area when D >r/2
在Rt△U2dg 中tan α,有

将式(17)代入式(16),整理得

解该二次方程,并保留正数解,得

为保证内接矩形的面积大于0,应该满足min(AD,BD)>0,根据式(17)、式(19)可得rsin α。
精定位区内接矩形的面积为


由式(15)、式(20)可以看出,精定位区内接矩形面积SADBD的大小受r,α,D 及dD的影响。对于特定的装备,舰载无人机在侦察定位过程中r,α 及D 通常均为定值,因此SADBD为dD的函数。当α=45°时,有

显然,式(21)是一个求极值问题,理论上可通过求导方法得到最大值。但由于函数SADBD(dD)的表达式过于复杂,无法求出最大值的解析表达式,因此只能采用在取值范围内进行数值搜索的方法得到最大值的数值解。现设α =45°,r =200 km,采用数值搜索的方法分别计算不同基线长度D 时对应的最大内接矩形面积及相关参数,计算结果如表1、表2所示。
在实际作战中,总是希望能用最大内接矩形去覆盖目标分布区。确定双机有效精定位区最大内接矩形的关键参数是dD,而在r 及α 一定的情况下,dD的值又由基线长度D 的大小所决定,因此确定dD与D 的关系非常重要。然而实际上难以建立dD与D的显性表达式,一种解决方法通过数值建立dD与D 的关系表,如表1 及表2 所示,然后通过查表的方法确定不同基线长度下的dD值;另一种方法是根据数值计算结果,采用拟合方法,建立dD与D 的近似关系式。
通过对表1 和表2 数据的拟合可得到,双机有效精定位区最大内接矩形参数随基线D 的变化关系式为:当D≤r/2 时,
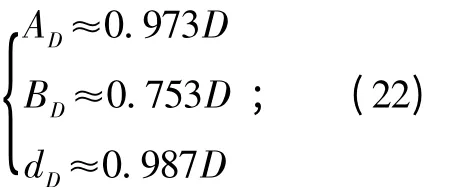

表1 D≤r/2 时,不同基线长度下对应的最大内接矩形面积及相关参数Table 1 Area and other relevant parameters of max inscribed rectangle with different base line lengths when D≤r/2

表2 D >r/2 时,不同基线长度下对应的最大内接矩形面积及相关参数Table 2 Area and other relevant parameters of max inscribed rectangle with different base line lengths when D >r/2
当D >r/2 时,
显然,dD是决定舰载无人机配置区域的关键参数。也就是说,当目标分布区域确定以后,根据最大内接矩形覆盖目标分布区的原则,应用dD即可确定舰载无人机的侦察机动区域。侦察机动区的具体确定方法将另文详细探讨。
4 双机有效精定位区与等圆概率误差曲线的关系
在有效精定位区内,定位精度是否能满足要求?在文献[1]仿真计算结果的基础上,将有效精定位区与等圆概率误差曲线进行叠加,这有利于问题的分析。
设舰载无人机最大水平侦察距离r=200 km,在测向精度σφ=1°和不同基线长度D 下,在CEPφ等值线图上叠加有效精定位区,其仿真结果如图7 所示。
从图7 可以看出,当舰载无人机双机对目标辐射源进行协同侦察定位时,其最佳配置是当双机基线距离为载机水平探测距离一半的时候,此时双机有效精定位区面积最大,而且定位精度较高。需要说明的是,图中位于有效精定位区域外的各点(如C 点)虽然也满足给定CEP 的要求,但在该状态下,对双机交叉定位来说已没有实际意义。
如图7b 中C 点和A 点有相同的CEP 值,但C 点位于有效精定位区域外,尽管C 点位于无人机U1的精测向区域内,但其位于无人机U2的精测向区外,因此无人机U1,U2只能分别对C 点辐射源进行技术参数的侦察和协同进行概略定位,而不能协同对其进行精确定位。要达成协同进行精确定位,无人机U2必须进行有效机动,在该状态下,无人机U2应向目标方向转向,使得目标C 进入无人机U2的精测向区内。而B 点辐射源虽然位于无人机U1,U2的精测向区域内,但却在可定位区域圆的外侧,定位线交会角小于30°,因此也不能对其精确定位。在这种状态下,无人机U1,U2应向与目标距离减小的方向机动。

图7 双机有效精定位区与定位精度的匹配Fig.7 Match between dual-UAV effective precise locating area and locating precision
上述分析可以看出:舰载无人机双机协同侦察定位时需要进行有效机动,机动的基本要求是:1)尽可能保持较大的有效精定位区;2)在定位过程中始终保持有效精定位区覆盖目标。
以上分析的是两架侦察设备完全相同的舰载无人机,采用单纵队形式,等速、等高飞行,对辐射源进行测向定位。下面分析当两架舰载无人机采用方位队飞行时的情况。
当两架舰载无人机采用方位队时,双机基线与速度矢量不在同一铅垂面内。仍以基线D 为y 轴,设舰载无人机U1,U2的航向线与y轴(基线)的夹角为φ0,显然有效精定位区的大小与φ0有关。如图8 所示为两架舰载无人机采用方位队飞行,此时,有效精定位区偏离基线的中垂线,定位性能下降,所以,双机协同无源侦察定位时,不宜采用方位队配置。

图8 双机方位队左侧有效精定位区域分析示意图Fig.8 Sketch map of left side of bearing formation's effective precise locating area
5 基本结论
舰载无人机双机无源定位,是保障驱护舰编队超视距隐蔽对海导弹攻击的重要手段。通过本文的分析,可以得出如下基本结论:对于两架侦察设备完全相同的舰载无人机,对辐射源进行侦察定位时应:
1)两架舰载无人机应采用单纵队形式,等速、等高飞行;
2)为满足有效精定位区面积最大,两机基线D 应取最大水平侦察距离r 的一半;
3)实际作战中,两机基线D通常应不大于最大水平侦察距离r的一半;
4)当两机基线D 一定时,应使用有效精定位区最大内接矩形区覆盖目标分布区的方法对无人机进行配置;
5)将目标置于基线的中垂线上,可保证在相同的定位精度下获得距离优势;
6)任何情况下以最大精定位区面积覆盖目标分布区对辐射源目标进行侦察定位都是有意义的。
[1] 朱青松,谭安胜,王新为,等.舰载无人机双机无源定位原理与精度分析[J].电光与控制,2015,22(8):23-28.(ZHU Q S,TAN A S,WANG X W,et al. The principle and precision analysis of passive location of double-shipborne UAV[J].Electronics Optics & Control,2015,22(8):23-28.)
[2] WILEY R G.电子情报(ELINT)——雷达信号截获与分析[M].吕跃广,译. 北京:电子工业出版社,2008.(WILEY R G.ELINT:the interception and analysis of radar signals[M].Translated by LYU Y G.Beijing:Publishing House of Electronics Industry,2008.)
[3] 王红星,曹建平.通信侦察与干扰技术[M]. 北京:国防工业出版社,2005.(WANG H X,CAO J P.Communication reconnaissance and jamming technology [M]. Beijing:National Defense Industry Press,2005.)
[4] 孙仲康,周一宇,何黎星,等.单/多基地有源无源定位技术[M].北京:国防工业出版社,1996.(SUN Z K,ZHOU Y Y,HE L X,et al.Single/multiple base active and passive location technology [M].Beijing:National Defense Industry Press,1996.)
[5] 魏瑞轩,李学仁.无人机系统及作战使用[M].北京:国防工业出版社,2009.(WEI R X,LI X R.UAV system and operational use[M].Beijing:National Defense Industry Press,2009.)
[6] 季晓光,高晓光.一种机载无源定位方法——干涉仪定位[J]. 火力与指挥控制,2008,33(11):158-161. (JI X G,GAO X G. An airborne passive location algorithminterferometer locating [J]. Fire Control & Command Control,2008,33(11):158-161.)
[7] 王喜鹏,王飞.机载无源定位精度分析[J].舰船电子工程,2012,35(3):23-26. (WANG X P,WANG F.Analysis of airborne passive location precision[J]. Ship Electronic Technology,2012,35(3):23-26.)
[8] 毛虎,杨建波,邱宏坤.机载二维干涉仪测向误差分析[J].火力与指挥控制,2011,36(12):67-71.(MAO H,YANG J B,QIU H K.Error analysis of direction finding for airborne two-dimension phase interferometer[J].Fire Control & Command Control,2011,36(12):67-71.)
[9] 周亦军,李旻,李锐.纯方位定位中观测站布局优化研究[J]. 舰船电子技术,2010,30(11):69-71.(ZHOU Y J,LI M,LI R. Research on constellation optimization of multi-observer inbearing only localization[J].Ship Electronic Engineering,2010,30(11):69-71.)
[10] 修建娟,王国宏,何友,等.纯方位系统中的定位模糊区分析[J].系统工程与电子技术,2005,27(8):1391-1393.(XIU J J,WANG G H,HE Y,et al.Study on ambiguous location area in the bearing only location system[J]. Systems Engineering and Electronics,2005,27(8):1391-1393.)
