柔性直流输电系统控制策略及动模试验
2015-04-03赵倩张群严兵郝俊芳陈朋
赵倩,张群,严兵,郝俊芳,陈朋
(许继电气股份有限公司,河南省许昌市461000)
0 引言
柔性直流输电技术自20世纪90年代后得到了迅猛发展,世界范围内已投运和在建的柔性直流输电工程超过20个[1]。目前,柔性直流输电工程实现方式有2种:基于功率器件串联的两三电平技术[2]和基于功率模块串联的模块化多电平[3](modular multilevel converter,MMC)技术。
实际工程证明,柔性直流输电技术能够实现有功功率和无功功率解耦控制,向无源负荷供电,易于构成多端直流输电系统及向电网提供无功功率紧急支援,提高电网的稳定性[4-5]。而模块化多电平技术相较于两三电平技术大幅降低了功率器件的开关频率,提高了换流站效率[6];输出电压波形品质好,降低了对滤波器的要求[7],更符合市场需求。
柔性直流输电控制系统与传统直流输电控制系统相比,在功能和性能上都有了更高的要求。传统直流输电控制系统性能能够达到ms级,而柔性直流输电控制系统性能要求达到μs级[8]。虽然柔性直流输电控制策略理论方面的研究已经取得了不少成果[9],但针对工程控制策略及实现的相关文献较少。
本文在分析柔性直流输电系统数学模型的基础上,进一步提出了工程控制策略实现方案,并在我公司动模试验系统上进行了暂稳态功能及性能验证,结果表明控制系统的功能及性能满足工程需求。
1 数学模型及控制策略
1.1 MMC数学模型
由于MMC的工作原理已经有诸多文章进行研究[10-11],在此不再赘述。根据三相MMC的拓扑结构(图1)对单个相单元中的上、下桥臂分别应用基尔霍夫电压定律,可得:

图1 三相MMC的拓扑结构图Fig.1 Topology of three-phase MMC

式中:ua、ub、uc为阀侧三相交流电压;Udc为直流母线电压;upa、upb、upc为三相上桥臂子模块电压和;una、unb、unc为三相下桥臂子模块电压和;ipa、ipb、ipc为流过三相上桥臂的电流;ina、inb、inc为流过三相下桥臂的电流;2L为桥臂电感;2R为桥臂等效电阻。
由公式(1)、(2)消去 Udc,并进行 dq变换可得MMC在dq坐标系下的数学模型:

式中:L为桥臂电感值的1/2;R为桥臂等效电阻值的1/2;id、iq为阀侧电流的 dq轴分量;ud、uq为阀侧电压的dq轴分量;ω为角频率;vd、vq为换流器输出交流电压的dq轴分量。
由公式(3)进行拉普拉斯变换,可得MMC频域下的数学模型:

公式(4)中相关量的含义与公式(3)中的相同,以上为正序MMC数学模型的推导过程,同理也可推出负序MMC数学模型,此处不再赘述。
1.2控制策略
控制系统具有有功类控制目标(有功功率、直流电压、交流系统频率等)和无功类控制目标(无功功率、交流系统电压等)任意组合方式的控制能力[12]。各种控制方式在功率正送和反送条件下均可以实现,且可以在运行中进行切换。
根据完成的功能和控制目标,可分为4层控制策略:换流站级控制、换流器级控制、阀级控制和子模块级控制,受限于篇幅,本文只针对换流站级控制和换流器级控制。
换流站级控制主要从调度要求和直流系统稳定运行角度确定系统的整体控制策略与换流站的控制目标,完成运行方式的控制、控制指令的整定、站内开关顺控和联锁、分接头控制(基于调制比限制控制策略)、系统启动/停运顺序控制等。换流器级控制实现有功功率、无功功率、交流电压、直流电压、频率等控制目标。
由MMC的正负序数学模型,可通过前馈解耦方法推导出MMC的换流器级控制策略,MMC换流器级控制策略分为内环控制和外环控制,内环控制器实现对阀侧电流的控制,外环控制器实现对有功类以及无功类控制量的控制。为了抑制负序分量对于控制系统的影响,换流器级内环控制策略采用基于正序和负序的独立双闭环电流解耦控制策略[13],具体控制框图见图2、图3,正负序电压、电流分别作为各控制器的前馈和反馈量参与控制,削弱负序对系统运行的影响,保证换流器的稳定控制。
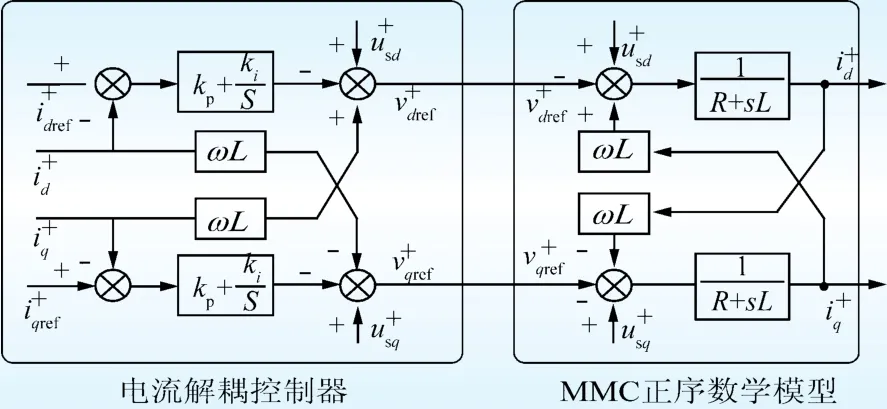
图2 正序内环电流控制器Fig.2 Positive sequence inner current controller

图3 负序内环电流控制器Fig.3 Negative sequence inner current controller
由于负序控制器的目的就是抑制负序分量,故其换流器级内环控制参考值都设为0,不需要外环控制。对于正序控制器,根据瞬时功率理论,MMC与交流系统之间传递的有功与无功可以用公式(5)表示:

式中:ua、ub、uc是阀侧三相交流电压;ia、ib、ic是阀侧三相交流电流。在dq坐标系下,有功和无功功率可以用公式(6)表示:
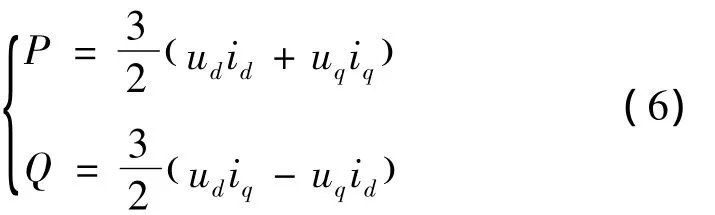
式中:id、iq为阀侧电流的 dq轴分量;ud、uq为阀侧电压的dq轴分量。根据公式(6)可得有功功率及无功功率控制器如图4所示。
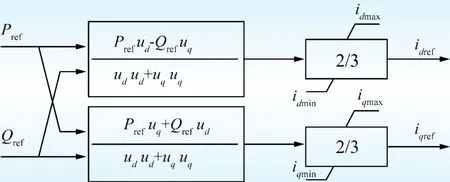
图4 功率外环控制器Fig.4 Power outer loop controller
当采用定直流电压控制时,可根据直流电压参考值得到正序d轴电流参考值,直流电压控制框如图5所示。

图5 直流电压外环控制器Fig.5 DC voltage outer loop controller
至此,针对柔性直流输电系统的换流站级及换流器级控制策略及功能已经介绍完毕,下一部分将介绍利用我公司已有的平台HCM3000/F实现柔性直流控制系统。
2 HCM3000/F控制系统
2.1 硬件配置
柔性直流输电工程化控制系统主要由运行人员工作站、系统控制屏、阀基电子控制屏组成,本文仅针对系统控制屏的实现展开研究。柔性直流输电控制系统的核心是HCM3000/F控制装置,针对柔性直流的应用其典型配置如图6所示,同时也可根据不同的工程要求选配不同的插件。
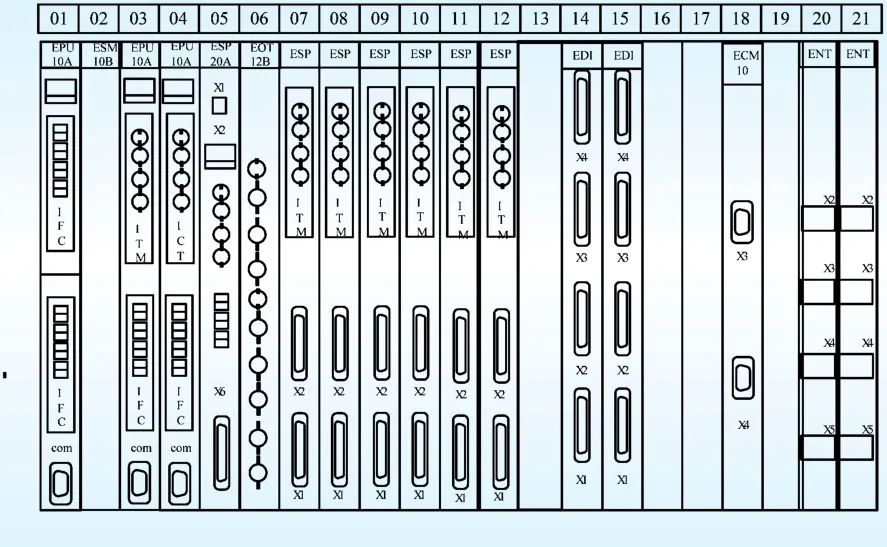
图6 HCM3000/F典型配置Fig.6 Typical configuration of HCM3000/F
HCM3000/F装置具备高速、高性能、高可靠的数据传输与交换通道,能够满足柔性直流输电控制系统功能及性能要求,典型配置中主要板卡功能如下:
(1)EPU10A插件是HCM3000/F装置中的主处理器插件,不仅具有运算和控制功能,还具有管理和配置机箱中其他各种插件,实现插件间数据交换的功能;
(2)ESP20A插件是HCM3000/F装置中的内环控制器插件,具有电流内环和功率外环控制功能,还具有模拟量输入接口、IEC60044-8光纤接口及快速总线通信接口,实现与阀控系统、HCM3000/F其他插件的数据交换功能;
(3)ESP插件是HCM3000/F装置中的数字信号处理插件,一般用于测量系统,完成一次系统模拟量的采集,并将数据进行初步处理;
(4)EDI插件完成开关量的输入输出,具体配置由EPU10A插件实现,实现开关控制及开关状态检测功能;
(5)ENT插件是一种以太网总线通信插件,实现速率为10/100 Mbps的以太网通信,完成站间通信及后台通信的功能。
2.2 软件配置
根据硬件配置的不同,控制程序可分为EPU主控制程序和板卡控制程序。EPU主控制程序完成顺控联锁、外环参考值的生成及系统监测功能,程序执行步长可达ms级,其程序组成如图7所示。
板卡程序包含ESP20A及ESP板卡,主要完成外环控制、内环控制及数字信号的快速处理,程序执行步长可达μs级,其程序组成如图8所示。

图7 EPU主控制程序Fig.7 Main control program of EPU
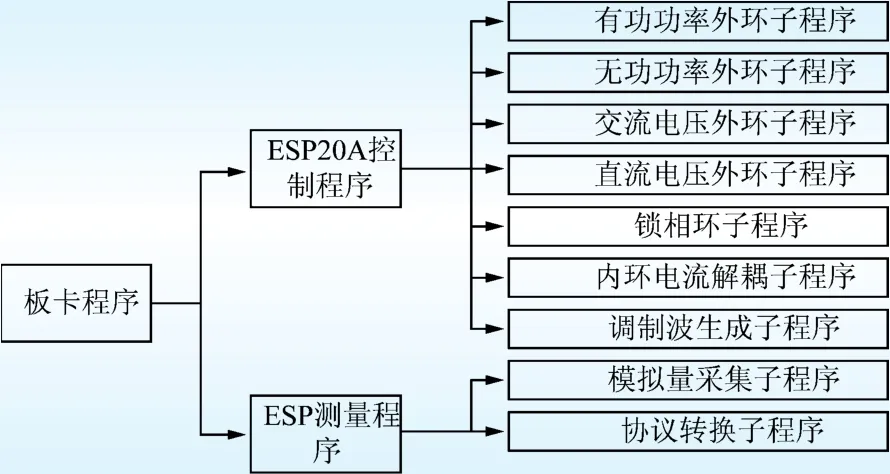
图8 板卡控制程序Fig.8 Board control program of EPU
3 动模系统
柔性直流输电控制系统开发完成后与我公司已有的阀控系统、换流阀及一次设备组成动模系统进行控制系统功能及性能的验证。基于此动模试验系统开展控制策略的试验研究,在验证公司柔性直流控制设备产品功能的正确性和可靠性方面更有说服力。
我公司搭建的柔性直流输电动模试验系统如图9所示。总体上由2个对等的换流器端组成,每端分别由一次回路部分、阀控设备部分、系统控制部分和运行人员工作站组成,运行人员工作站进行试验系统的总体控制和监视。

图9 动模系统Fig.9 Dynamic simulation system
动模系统与数字仿真系统区别之一在于通信的稳定可靠对控制系统功能及性能具有直接的影响。HCM3000/F控制系统作为二次系统的核心设备需要与多个部分进行稳定可靠的通信,通过分析公司特高压直流输电工程现有的接口方案,提出了能够直接应用于未来柔直工程的接口方案,具体方案如下。
(1)阀控系统与控制系统接口:本接口主要由两发两收4路光纤通道构成。一路是控制系统通过IEC60044-8协议向阀控系统下发调制波、触发晶闸管、解锁及闭锁等命令,一路是控制系统通过IEC60044-8协议接收阀控系统桥臂子模块电压和、阀控设备自检正常及请求系统切换等信号。另外还有2路独立光纤通道实现控制系统下发主被动信号和阀控系统上传请求跳闸信号,1 MHz表示主动信号或跳闸有效,10 kHz表示被动信号或跳闸无效。
(2)监控系统与控制系统接口:监控系统通过104规约与控制系统进行数据交互。这种数据交互方式已经应用于多个特高压直流输电工程,具备实现简单、通信可靠的优点。
(3)一次系统与控制系统接口:由于动模系统不具备光CT和光PT,故采用硬接线方式通过ESP插件进行模拟量的采集。实际工程中若有光CT和光PT,可采用 IEC60044-8协议利用光纤通道进行传输。
(4)GPS对时与控制系统接口:本接口传输时间同步信号,通信协议为IRIG-B编码[14],是时钟通用协议。
4 控制系统功能及性能验证
为了验证控制系统功能及性能,分别做以下试验:(1)顺控解锁试验;(2)功率阶跃试验;(3)交流母线电压跌落试验。此次动模试验主电路参数(两站参数完全一致)见表1,整个过程中端1为定直流电压控制和定无功功率控制,端2站为定有功功率控制和定无功功率控制,所有试验波形均由HCM3000/F内置录波功能完成。各个试验具体步骤见下文。

表1 主电路参数Table 1 Main circuit parameters
(1)顺控解锁试验:由于两端均为有源连接方式,故先闭合端1、端2交流侧断路器,使系统处于不控充电阶段,即通过并联二极管给子模块电容进行充电,待不控充电阶段完成后,再闭合端1、端2与旁路电阻并联的隔刀,由于端1为控直流电压站,先解锁换流器,待直流电压稳定后再解锁端2换流器,从而实现系统解锁运行,此试验能够验证控制系统的基本控制功能。端1顺控解锁试验波形详见图10。从图中可以看出顺控解锁功能正常且能够满足工程要求。
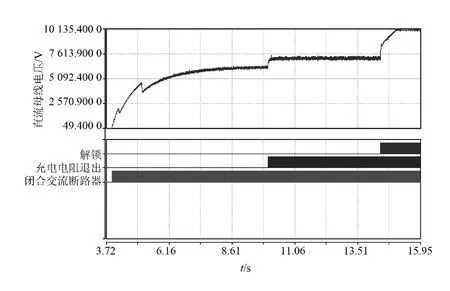
图10 顺控解锁试验Fig.10 Sequence control unlocking test
(2)功率阶跃试验:目前,柔性直流输电系统要求能够在设计功率的范围内任意功率水平下运行,有功功率、无功功率等的阶跃响应应快速且不对交流系统造成冲击,端2有功功率控制器的阶跃响应特性如图11所示。此试验能够验证控制系统功能及性能,从图11中可以看出控制系统功能及性能能够满足工程要求,响应速度及时,对交流系统基本没有冲击。

图11 功率阶跃试验Fig.11 Power step test
(3)交流母线电压跌落试验[15]:电网故障(包含交流母线电压跌落)穿越控制已经成为柔性直流输电工程的基本功能。目前,工程招标中要求整流侧交流系统三相对地短路故障,即使电压降至正常电压的
,换流器也可长期运行,并向系统提供无功支撑;逆变侧交流系统故障,即使电压降至正常电压的30%,换流器也可持续运行至少0.2 s,在此期间若故障消除,系统能够恢复正常。端1(电压站)试验波形详见图12,从图中可以看出电网故障穿越功能正常且能够满足工程要求。

图12 交流母线电压跌落试验Fig.12 AC bus voltage drop test
5 结论
本文通过建立柔性直流输电系统数学模型,推导出工程用控制策略,在通用控制平台HCM3000/F上进行了实现,并结合我公司已有的阀控系统、一次系统组成完整的柔性直流输电动模系统,进行控制系统功能和性能验证。动模试验结果表明,该控制系统能够完成柔性直流输电系统的各种控制功能,在暂稳态过程中具备优良的调节性能。
[1]汤广福,贺之渊,庞辉.柔性直流输电工程技术研究、应用及发展[J].电力系统自动化,2013,37(15):3-14.Tang Guangfu,He Zhiyuan,Pang Hui.Research,application and development of VSC-HVDC engineering technology [J].Automation of Electric Power Systems,2013,37(15):3-14.
[2] Bopparaju,Gopichand.VSC based FACTS and HVDC:ABB's experience[C]//International Conference on Sustainable Energy and Intelligent Systems(SEISCON 2011).Chennai:IET,2011.
[3] Debnath S,Jiangchao Qin,Bahrani B.Operation,control and applications of the modular multilevel converter:a review[J].IEEE Transactions on Power Electronics,2015,30(1):37-53.
[4]刘钟淇,宋强,刘文华.基于模块化多电平变流器的轻型直流输电系统[J].电力系统自动化,2010,34(2):53-58.Liu Zhongqi,Song Qiang,Liu Wenhua.VSC-HVDC system based on modular multilevel converters[J].Automation of Electric Power Systems,2010,34(2):53-58.
[5]李文津,汤广福,贺之渊.DFIG风电场经模块化多电平柔性直流并网控制策略[J].电力系统自动化,2013,37(15):20-26.Li Wenjin,Tang Guangfu,He Zhiyuan.Control strategies of DFIG-
61 based wind farm grid integration using modular multilevel VSCHVDC technology[J].Automation of Electric Power Systems,2013,37(15):20-26.
[6]董云龙,杨勇,田杰,等.基于模块化多电平换流器的柔性直流输电动态模拟系统[J].电力系统自动化,2014,38(11):74-78.Dong Yunlong,Yang Yong,Tian Jie,et al.Dynamic simulation system for modular multilevel converter based VSC-HVDC[J].Automation of Electric Power Systems,2014,38(11):74-78.
[7]董云龙,包海龙,田杰,等.柔性直流输电控制及保护系统[J].电力系统自动化,2011,35(19):89-92.Dong Yunlong,Bao Hailong,Tian Jie,et al.Control and protection system for VSC-HVDC[J].Automation of Electric Power Systems,2011,35(19):89-92.
[8]宁大龙,同向前,尹军.柔性直流输电系统的设计及运行特性实验[J].中国电机工程学报,2014,(34):6042-6049.Ning Dalong,Tong Xiangqian,Yin Jun.Design and laboratory test of HVDC system based on voltage source converter[J].Proceedings of the CSEE,2014,34(34):6042-6049.
[9]刘欣和,吴金龙,韩坤,等.基于电压向量合成的模块化多电平换流器控制策略[J].电力建设,2014,35(3):36-42.Liu Xinhe,Wu Jinlong,Han Kun,et al.Research of modular multi-level convertercontrolstrategy based on voltage vector composition[J].Electric Power Construction,2014,35(3):36-42.
[10]邓旭,沈扬,王东举,等.基于模块化多电平换流器的多端柔性直流系统接地方式[J].电力建设,2014,35(3):24-30.Deng Xu,Shen Yang,Wang Dongju,et al.Grounding methods of multi-terminal VSC-HVDC system based on modular multi-level converter[J].Electric Power Construction,2014,35(3):24-30.
[11]侯婷,饶宏,许树楷,等.基于MMC的柔性直流输电换流阀型式试验方案[J].电力建设,2014,35(12):61-66.Hou Ting,Rao Hong,Xu Shukai,et al.Valve type test scheme for flexible DC transmission system based on MMC[J].Electric Power Contruction,2014,35(12):61-66.
[12]孔明,汤广福,贺之渊,等.不对称交流电网下MMC-HVD输电系统的控制策略[J].中国电机工程学报,2013,33(28):41-49.Kong Ming,Tang Guangfu,He Zhiyuan,et al.A control strategy for modular multilevel converter based HVDC of unbalanced AC systems[J].Proceeding of the CSEE,2013,33(28):41-49.
[13]吕敬,高宁,蔡旭,等.基于复合控制的并联有源滤波器的仿真研究[J].高压电器,2012,48(3):81-85.Lü Jing,Gao Ning,Cai Xu,et al.Simulation study of shunt active power filter based on compound control[J]. High Voltage Apparatus,2012,48(3):81-85.
[14]卜强生,宋亮亮,张道农,等.基于GPS对时的分散采样差动保护同步测试方法研究[J].电力系统保护与控制,2013,41(22):149-153.Bu Qiangsheng,Song Liangliang,Zhang Daonong,et al.Research on the test method of distributed sampling differential protection synchronization based on GPS time[J].Power System Protection and Control,2013,41(22):149-153.
[15]陈国栋,朱淼,蔡旭,等.一种软件锁相环和电压跌落检测新算法[J].中国电机工程学报,2014,34(25):4385-4394.Chen Guodong,Zhu Miao,Cai Xu,et al.A new algorithm for software phase locked-loop and voltage sag detection[J].Proceeding of the CSEE,2014,34(25):4385-4394.