基于实测数据的双馈风电机电暂态仿真模型参数识别方法
2015-04-03侯俊贤王小海陶向宇齐军张石张红光
侯俊贤,王小海,陶向宇,齐军,张石,张红光
(1.中国电力科学研究院,北京市100192;2.内蒙古电力调度通信中心,呼和浩特市010020)
0 引言
风电在我国快速发展,在西北、华北、东北等地区都已经形成较大规模的风电场群,对电网安全稳定运行具有重要影响。风电机组的仿真模型和参数是进行大规模电网风电仿真分析的重要基础。首先需要建立适合电力系统机电暂态仿真的仿真模型,然后根据实际风电机组情况确定对应的模型参数,才能达到真正实用的目的。
多年来,国内外对风电模型进行较多的研究工作[1-7],对风电机组的基本原理和模型结构有了比较深入的认识。随着我国实际电网风电的快速发展和风电、变频器相关技术的进步,实际系统中的风电机组控制特性不断提升。与我国实际机组进行密切结合,充分了解实际机组的控制特性,并建立对应的仿真模型和参数成为面向实际电网应用需要解决的问题[8]。目前已经建立了比较详细的适用于工程应用的双馈类型风电模型,需要基于模型和实际风电机组参数,建立实际风电对应的模型参数。
对于双馈风电机组而言,模型参数除了物理系统固有的一些参数之外,主要包括控制系统的参数。对于控制系统的参数辨识,传统发电机控制系统的参数辨识已经研究多年并形成了比较成熟的方法[9-11],对于风电模型控制系统中具体参数的确定具有一定的参考意义。对于风电模型的参数辨识问题,近年来也开展了较多的研究工作[12-14],文献[12]和[13]主要是针对正常控制参数进行辨识,文献[14]主要是针对双馈发电机参数进行辨识。由于风电控制系统比较复杂,除了正常的控制之外,还包括在低电压穿越情况下的特殊控制部分,不同部分对风电特性的影响相差较大,需要采用不同的方法区别对待。
本论文主要从双馈风电特点和模型结构出发,结合实际电网仿真计算关注的主要问题,针对风电机组在电网电气故障后的有功、无功特性,开展了模型中不同部分和参数对双馈风电机组外特性的影响分析,并根据影响程度和实际数据基础条件提出了分类参数获取方法,对其中影响比较大的低电压穿越相关控制方式和参数采用实际数据进行辨识。
1 双馈风电模型结构
双馈风电机组基本结构示意图如图1所示。

图1 双馈类型风电机组结构示意图Fig.1 Unit structure of double-fed wind power
发电机部分采用一般的鼠笼异步电机,发电机的定子绕组直接与系统相连,转子绕组通过背靠背的换流器与系统相连。转子侧相连的变频器控制可以控制转子电压的幅值和角度,进而控制有功、无功功率。
在机电暂态仿真中双馈风电机组模型结构主要包括两方面,一方面是一次系统的仿真模型,包括空气动力学部分、轴系部分、发电机等;另一方面是控制保护系统模型,控制保护主要集中在变频器,包括正常状态的控制以及电网故障条件下的控制和保护。双馈类型风电的机电暂态模型基本结构如图2所示。
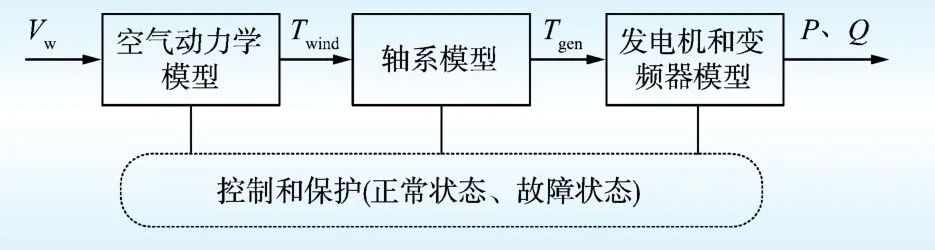
图2 双馈风电机组模型结构示意图Fig.2 Model structure of double-fed wind power
双馈类型风电机组结构复杂,对应的模型结构和控制方式也比较复杂,主要包括:
(1)物理系统模型。
1)空气动力学模型,用于模拟叶片将风能转换为机械能部分;
2)轴系模型,包括慢速轴和快速轴;
3)发电机和换流器模型,包括双馈发电机组、换流器直流侧电容等。
(2)控制系统模型。
1)桨矩角控制系统,主要模拟电网故障和动态过程中的动态行为;
2)机侧变频器控制模型,包括正常状态以及低电压穿越状态的控制;
3)网侧变频器控制模型。
(3)保护模型,主要包括Crowbar、Chopper等。
变频器控制部分,特别是机侧变频器控制部分是其中主要的控制部分。机侧变频器控制部分包括机侧变频器本身的控制以及与之相关的主控部分,是风电机组控制的最核心部分。实际机组中,正常状态下变频器控制响应主控命令进行控制,在电网故障发生后,变频器控制主导整个控制部分,二者之间相互配合。将二者作为一个整体考虑,主要的控制功能如图3所示。

图3 机侧变频器控制示意图Fig.3 Generator-side inverter control
该模型中主要包括如下几个部分:
1)正常状态下的有功功率控制;
2)正常状态下的无功功率控制;
3)转子电压控制;
4)低电压穿越状态的判断;
5)低电压穿越期间和结束后的有功控制;
6)低电压穿越期间和结束后的无功控制。
2 不同模型参数的影响分析
双馈风电机组模型虽然非常复杂,但不同部分对其外特性的影响程度也相差较大。对于电力系统机电暂态分析,主要关注的是电网发生扰动后风电机组的有功、无功功率变化情况,对其影响比较大的主要是变频器的控制部分,特别是低电压穿越期间的控制部分。图4是一个典型的双馈风电机组低电压穿越期间和结束后的有功、无功曲线。

图4 低电压状态下双馈风电有功无功曲线实例Fig.4 Actual active and reactive power curves of double-fed wind power in low voltage condition
由图4可以看出,低电压状态发生后,风电机组的有功、无功功率变化非常明显。相对于正常状态下的有功无功特性,低电压状态下风电机组特性变化大得多。而对于其他模型参数,对外特性的影响大小不尽相同,需要根据不同情况区别对待。
(1)发电机物理设备参数。
发电机物理参数主要是风功率转换模型参数、轴系参数、发电机参数等,体现了风电机组本身固有的物理特性。
空气动力学模型参数涉及到叶片半径、桨距角、叶片转速、风速4个参数,反映了风能产生的机械转矩。其中叶片半径是输入参数;桨距角、叶片转速、风速都是根据发电机状态自动确定初值,并根据系统动态过程中的控制系统进行调整。对于实际的风电机组,叶片半径都有比较确定的数值,对于特定容量,随着型号的变化叶片半径变化并不大,对应得到的其他变量会有一个较小的差异,但对整体机械转矩影响很小,并且相对于风电机组功率在暂态过程中的变化速度和幅度,引起的影响也非常小。
轴系部分主要反映了叶片对应的慢速轴和发电机对应的高速轴之间的振荡过程,参数包括高速轴惯量、低速轴惯量、阻尼系数和刚性系数、齿轮箱变比。对于特定容量的风电机组,不同型号、厂家的参数在同一量级水平。例如,2个不同厂家的1.5 MW机组对应的轴系参数如表1所示。

表1 2个不同厂家的轴系模型参数Table 1 Shaft model parameters of two manufacturers
其他参数都保持不变,分别采用表1中的2组轴系参数,三相短路故障的对比曲线如图5所示。

图5 不同轴系参数的对比曲线Fig.5 Comparison of different shaft parameters
从图5可以看出,不同轴系参数对发电机转速的动态过程有比较明显的影响,但对于发电机输出的有功功率影响相对较小,主要影响功率小幅波动的部分。
发电机参数主要包括定子阻抗、转子阻抗、激磁电抗等,这些参数会直接影响发电机的电气行为。表2是2台不同厂家1.5 MW风电机组的参数。
其他参数不变,分别采用表2中的2组发电机参数,对应的发电机有功、无功曲线如图6所示。
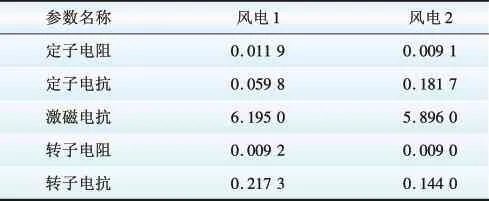
表2 个不同厂家的风电机组参数Table 2 Wind turbine parameters of two manufacturers pu

图6 不同发电机参数的对比曲线Fig.6 Comparison of different generator parameters
由图6可以看出,发电机采用不同参数对有功、无功的输出影响很小。风电机组输出特性主要决定于控制系统,风电机组本身容量小、响应速度快,相同容量的风电机组即使参数有一定的差异,但响应速度相差并不明显,因此对整体的输出特性影响较小。
从上面对风电本身物理参数的影响分析可以看出,不同参数对风电机组功率输出外特性的局部波动有一定的影响,对整体的曲线形态影响较小。
(2)桨距角控制系统。
桨距角控制系统主要功能是根据转速的变化控制桨距角大小,达到调节机械转矩的目的。机电暂态仿真中主要面临的问题是系统发生较大扰动后,发电机转速会发生明显的振荡。此时,如果转速低于额定转速时,桨距角通常不变化,在转速达到额定转速时,桨距角一般会存在一定的动态过程。桨距角的变化会影响到输入机械转矩,进而影响到发电机转速,对风电机组功率输出特性有其独特的影响方式。
桨距角控制系统中可调的主要参数是PI控制系统的比例和积分系数,比例和积分系数分别采用150.0、25.0和15.0、2.5,对比曲线如图7所示。

图7 不同桨距角控制参数的对比曲线Fig.7 Comparison of different pitch angle control parameters
从图7可以看出,采用不同PI参数,桨距角的动态过程有明显差异,发电机转速也有较大差异,但桨距角的差异性对发电机组的功率输出影响较小。发电机输出的功率包括定子侧功率和转子侧通过变频器交换的功率2部分,二者之间的分配比例与发电机转速直接相关,由于发电机转速存在差异,因此会导致定子侧、转子侧功率都存在差异,但二者之和,即发电机输出的总有功功率差异很小。
(3)正常状态下的有功、无功控制。
正常状态的有功控制通常有恒转矩控制、转速控制2种控制模式。恒转矩控制目标是保持转矩不变,在发电机转速变化不大的情况下基本上保持恒定功率控制,没有可调整的控制参数。而转速控制模式采用发电机转速作为输入信号控制有功功率,其中主要的控制参数是PI环节的比例和积分环节系数,分别选择3.0、0.6和1.0、0.2时的对比曲线如图8所示。
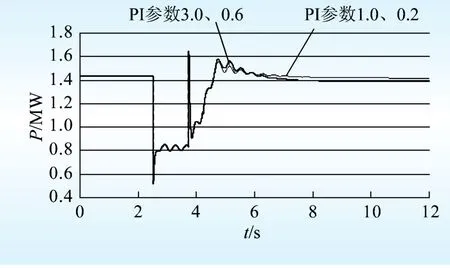
图8 不同有功控制参数的有功对比曲线Fig.8 Active power comparison curve of different active power control parameters
从图8中可以看出,在转速控制模式下,不同PI参数对输出功率有一定的影响,主要体现在低电压穿越结束后的比较平稳的部分。对于恒转矩、转速控制2种模式,对应的对比曲线如图9所示。方式决定了恢复的开始时间,影响比较明显。有功功率恢复阶段通常采用斜率形式或者抛物线的形式恢复,其恢复方式和速率的设置对有功功率有较大影响。

图9 不同有功控制模式的有功对比曲线Fig.9 Active power comparison curve of different active power control modes
从图9可以看出,采用不同控制模式进行对比时,有功功率、发电机转速的曲线相差较大,与图8采用不同控制参数的情况相比相差更加明显。
正常状态下的无功功率控制通常包括恒无功控制、恒定功率因数控制、电压控制等几种控制模式。和有功控制类似,控制方式的选择对无功输出的影响比较明显。
网侧变频器的有功控制目标是维持直流侧电压恒定,其控制参数的选择对有功输出的影响也很小。
(4)低电压穿越状态下的有功、无功控制。
低电压穿越状态下,有功功率的变化一般经历低电压状态、保持状态和恢复状态3个阶段,如图10所示。
在低电压穿越期间有功的控制通常采用设定功率、设定电流、按照初始功率控制等多种方式,控制方式及其具体限值的设置对有功功率的变化会产生较大影响。功率保持阶段可能存在也可能不存在,2种
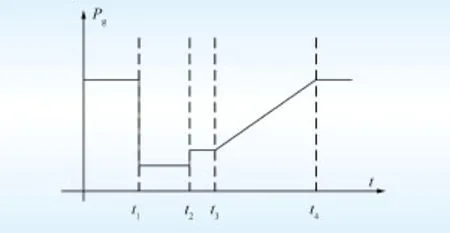
图10 典型低电压穿越有功功率曲线图Fig.10 Typical active power curves in low voltage ride through
图11 显示了有功功率2种不同控制方式的有功、无功功率曲线。其中,控制方式1在低穿期间按照初始功率控制,没有功率保持阶段,按照指定斜率上升;控制方式2在低穿期间控制电流为200 A,没有功率保持阶段,按照抛物线方式恢复。
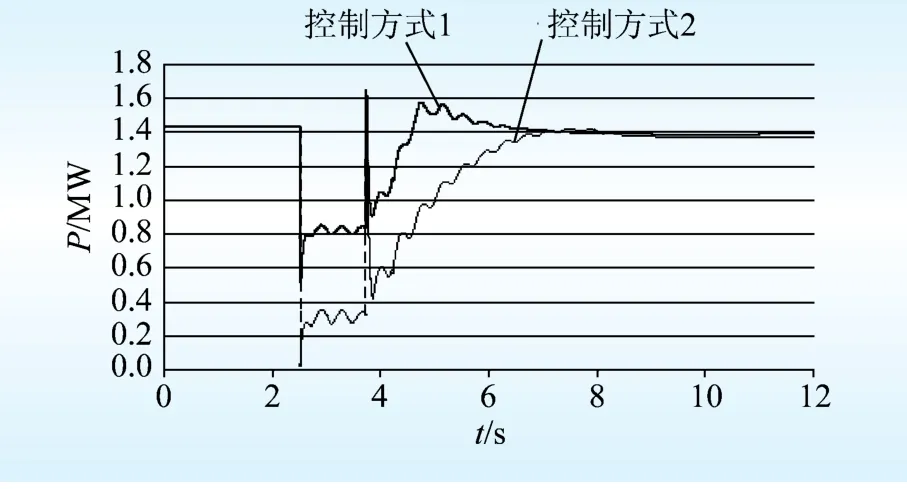
图11 不同有功低电压控制策略的有功对比曲线Fig.11 Active power comparison curve of different active low voltage control strategies
从图11可以看出,采用不同的控制策略和定值,会引起有功功率动态过程发生较大变化。
低电压穿越状态下,通常发出一定容量的无功功率,低电压穿越结束后,有功恢复到初始状态、保持一段时间或逐渐降低。和有功控制类似,无功控制方式和定值的选择对功率输出特性会产生较大影响。
低电压穿越状态期间,由于最大电流的限制,有功和无功都受到最大电流的限制,同时相互影响。因此,有功电流最大限制、无功电流最大限制、优先级设置都会对有功、无功的动态过程产生较大影响。
(5)保护装置。
双馈类型风电机组最主要的保护是Crowbar和Chopper,接线示意图如图12所示。

图12 双馈风机Crowbar和Chopper保护示意图Fig.12 Crowbar and Chopper protection of double-fed wind power
Crowbar电路与机侧变频器并联,动作后相当于将转子回路采用一个电阻端接;Chopper电路与直流侧电容器并联,投入后相当于在直流电容器两侧并联电阻。实际双馈类型风电机组设备中可能安装二者之一或者都安装。
Crowbar通常采用转子电流作为控制信号,动作后,改变了异步发电机的结构,使变频器的控制失去作用,需要从系统吸收一定容量的无功功率,因此会对发电机的无功输出产生较大影响。Chopper保护通常以直流电压作为控制信号,动作后吸收多余的能量,抑制直流侧电压升高,此时变频器的控制仍然正常起作用,Chopper动作对发电机输出的有功、无功影响不大。
(6)模型参数的总体影响分析。
从上述双馈风电模型不同部分的影响分析结果可以看出:
1)空气动力学模型、发电机、轴系等物理系统相关的参数对双馈风机的有功、无功输出影响较小;
2)桨距角控制系统参数对桨距角、发电机转速都有影响,同时影响有功功率在定子侧和转子侧的分配,但对整体的输出有功影响较小;
3)正常状态的有功、无功控制模型参数变化对有功、无功的输出影响不大,但其控制模式的选择影响比较明显;
4)低电压穿越期间和结束后的有功、无功控制方式和参数对整体的有功、无功输出影响较大;
5)Crowbar保护动作对风电机组无功输出特性有较大影响,而Chopper保护动作则影响较小。
双馈类型风电虽然采用异步电机作为发电机,并与电网有直接的电气联系,但由于变频器控制的快速性,变频器的控制对整体外特性具有关键性的影响,使物理设备本身的特性对整体的影响并不明显。在正常控制过程中,控制的快速性使动态过程比较平稳,波动较小。而在低电压穿越发生后,由于控制方式改变较大,对整体外特性影响较大,成为影响机电暂态过程中有功、无功变化的关键因素。
3 双馈风电模型参数识别基本原则
在双馈风电模型的基础之上,需要确定合理的模型参数,以满足实际应用的需要。双馈风电模型结构比较复杂,包含的参数比较多,对所有参数进行辨识工作量较大,也不一定有必要。根据第2节,双馈风电模型中不同部分的参数对双馈风电特性具有不同程度的影响。对于电力系统仿真应用,比较关心的是电网发生故障后风电机组的电气行为,可以对影响风电机组电气特性的主要参数进行辨识,主要是影响有功、无功特性的参数。从第2节可以看出,影响风电机组有功、无功特性的模型参数主要包括:
(1)正常状态下有功、无功的控制模式;
(2)低电压穿越期间的有功、无功控制策略。
进行风电模型参数辨识的数据需要根据试验获取,目前比较可行的主要是低电压穿越测试数据(或者是类似的试验数据),类似于常规发电机控制系统的详细的测试目前还存在一定的困难。因此,双馈风电机组参数的辨识可以在现有双馈风电机组低电压穿越试验数据的基础上开展,这些数据包含对称跌落和不对称跌落、不同电压跌落程度等多种运行工况,比较全面地反应了双馈风电机组的电气特性。
根据上述分析,基于双馈风电机组低电压穿越测试数据的模型参数辨识基本原则如下:
(1)风电机组本身固有的参数,例如发电机电阻、电抗、惯量等,这些参数对风电机组电气特性有较小的影响,厂家都能够提供这些参数,因此可以直接从厂家获取。
(2)正常控制系统中的参数,包括桨距角控制、正常有功和无功控制,主要是其中的控制模式和PI参数。这些参数决定了较小扰动状态下的动态过程,由于风电机组低穿引起的状态变化远远大于这些控制参数引起的波动,并且由于变频器控制的快速性使得正常的波动过程通常很快进入平稳状态,因此这部分参数可以选择一组典型的参数。正常状态下有功、无功控制模式的影响比较大,需要结合实际曲线进行判断。
(3)低穿期间和结束后有功、无功采用的控制方式和参数,这部分参数是影响风电机组特性最重要的部分,需要结合实际测试的数据进行综合分析确定。
(4)发电机保护参数,包括Crowbar和Chopper保护,其控制策略和对应的物理参数比较难以从测试曲线中辨识,暂时只能从厂家获取。
4 双馈风电模型参数辨识过程
双馈风电机组模型参数的辨识基本过程如下:
(1)与厂家针对具体控制策略进行沟通,获取基本参数,主要是物理设备的相关参数;
(2)根据多种工况下的测试数据,确定正常控制方式采用的控制模式,初步确定低电压穿越期间和结束后的控制策略;
(3)通过仿真和对比分析,确定具体的控制方式和参数。
确定最终参数后,基本上可以达到采用一套参数模拟所有工况的目的。以实际某厂家1.5 MW机组为例,说明具体的过程。
测试数据包括的工况:
(1)大功率、对称跌落20%、35%、50%、75%;
(2)大功率、不对称跌落35%、50%;
(3)小功率、不对称跌落35%、50%。
基本过程如下:
(1)从厂家获取基本参数。
获取模型中需要的风电机组参数,如表3所示。

表3 从厂家获取的风电模型参数Table 3 Wind power model parameters from manufacturer
(2)确定主要控制方式。
不同情况下的有功、无功功率曲线如图13、图14所示。
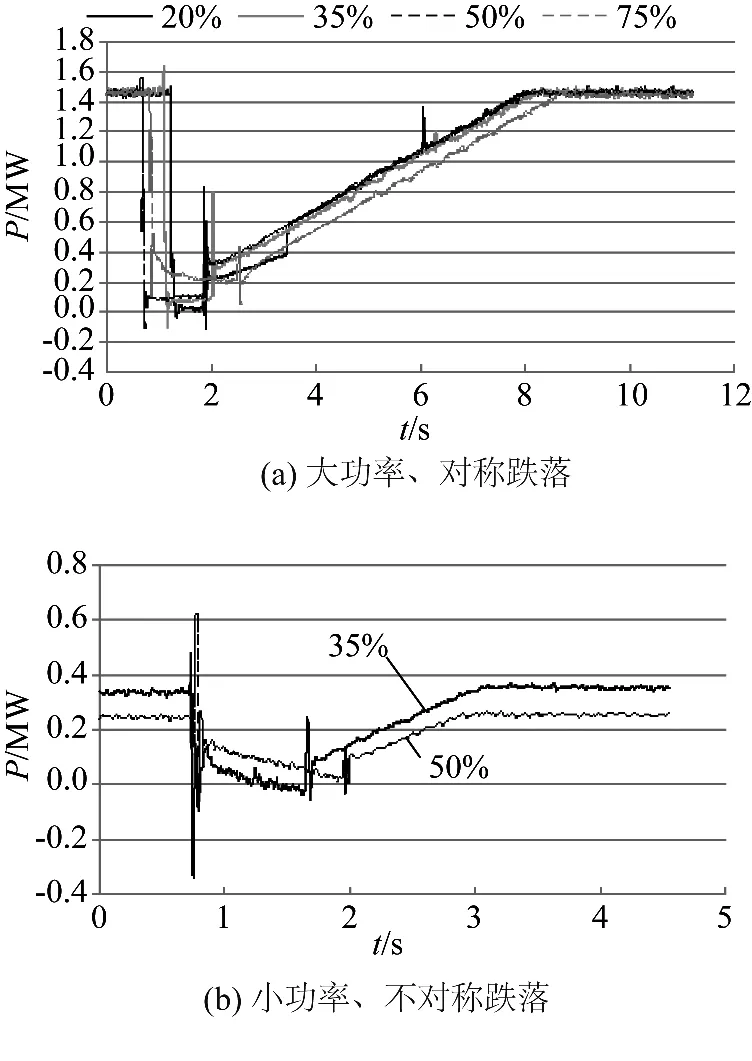
图13 不同工况下的有功功率测试曲线Fig.13 Active power measured curves under different conditions
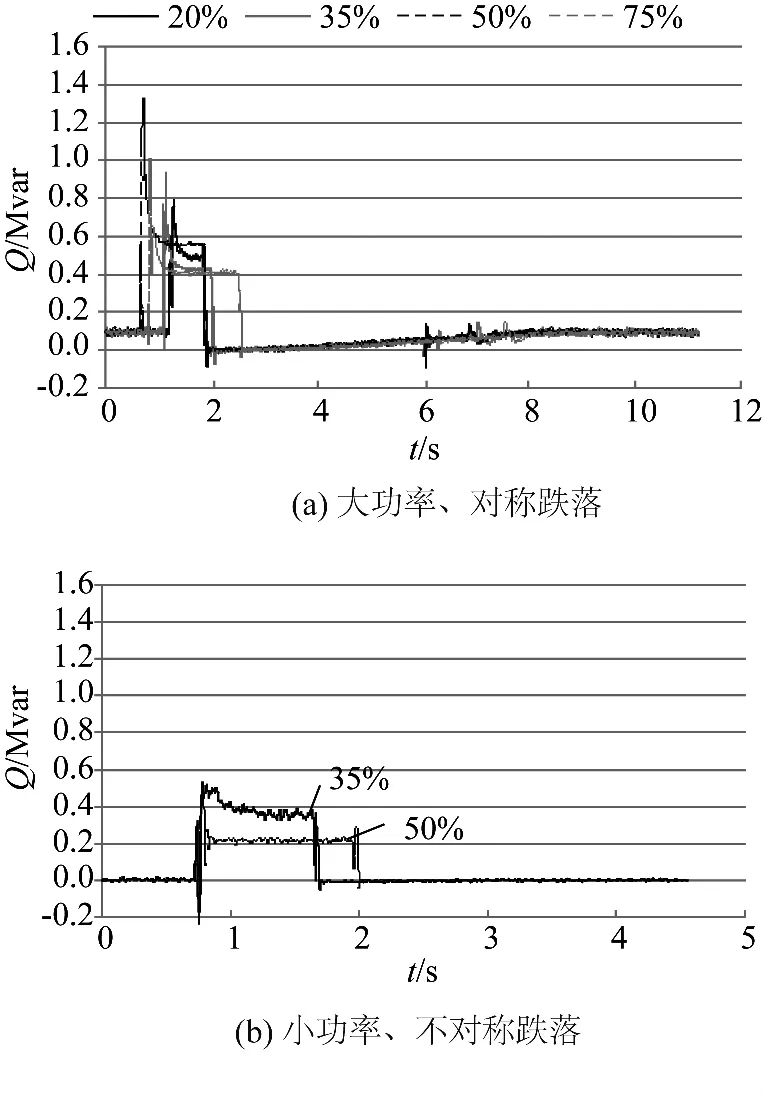
图14 不同工况下的无功功率测试曲线Fig.14 Reactive power measured curves under different conditions
从图13可以看出,低电压穿越过程中有功功率都维持较低水平,功率大小不同,基本确定是指定电流的控制模式;低电压穿越结束后没有保持阶段;恢复起始功率基本相同,说明指定了恢复的起始功率值;恢复过程以斜率的方式恢复,速度基本相同;功率恢复到初值后维持平稳状态,基本确定正常状态有功采用恒转矩的控制方式。
从图14可以看出,进入低电压穿越状态后,都发出一定容量的无功功率,无功大小不同,一般采用电压控制方式;低电压穿越结束后,无功立即回到较低的数值,说明进行正常的无功控制状态;低电压结束后的无功变化有一定的斜率,说明正常无功采用了恒定功率因数控制方式。
(3)确定具体的控制方式和参数。
在基本确定控制方式后,需要进行仿真对比确定具体的控制方式和参数,在此过程中,需要对所有的曲线进行对比和调整。经过对比调整后,确定主要的控制方式和参数如下:
(1)正常方式下有功功率控制为恒转矩控制模式、无功功率控制为恒功率因数控制。
(2)低电压穿越期间的有功功率采用固定电流的控制方式,低电压穿越结束后按照指定的电流值开始恢复,2个电流大小相同,基本上是初始电流的20%左右,大功率条件下选择250 A,小功率条件下选择60 A。
(3)低电压穿越期间的无功功率控制为根据电压的控制方式,放大倍数为2.0。
(4)低电压穿越期间采用无功优先的控制方式,有功电流、无功电流的最大限制值为1.2 pu。
采用上述参数后的部分对比曲线如图15所示,限于篇幅限制,仅给出几组对比结果。
从图15可以看出,进行不同工况下多曲线的对比和分析,可以确定基本的控制方式和参数,并能够达到不同情况下,采用同一套参数都能够准确仿真的目的。
针对实际对比和拟合过程中的一些问题,特别说明如下:
(1)模型参数拟合基于的实测数据必须包含多种不同的工况,例如大功率和小功率、不同电压跌落水平、对称和不对称等,这样才能更加有效地确定对应的控制模式和参数;
(2)基本上可以达到一套参数模拟所有工况的目的,即根据不同情况确定一套参数,实现与所有测试工况的有效对比;
(3)与实测曲线的对比不可能达到很理想的程度,在对比中会存在不合理数据或个别曲线无法有效对应的情况,但能够达到绝大多数曲线有效对应;

图15 不同工况下的有功、无功功率对比曲线Fig.15 Comparison between active and reactive power under different conditions
(4)本文主要针对双馈风电模型中影响比较大的参数拟合进行了说明,具体控制系统中的参数拟合部分可以采用传统的方法进行处理,但依赖于测试的精细化程度。
5 结论
(1)双馈类型风电模型具有比较复杂的结构,不但包括风能转换、轴系、发电机等物理设备模型,还包括桨距角控制、变频器控制以及保护模型,包含的参数也比较多。
(2)对于机电暂态仿真,主要关注电网故障后风电输出的有功、无功特性,模型的不同部分对输出特性影响程度不同,正常方式下的有功、无功控制方式及低电压穿越时的有功、无功控制方式和参数具有较大影响,需要重点考虑。
(3)双馈风电模型参数根据其影响程度可以采用不同的处理方法,物理设备本身的固有参数从厂家直接获取,正常状态控制系统参数采用典型参数,而影响比较大的正常状态控制方式及低电压穿越状态控制方式和参数采用实测数据拟合的方法。
(4)实践证明,采用多种工况下的低电压穿越实测数据,可以有效确定双馈风电的主要参数,实现风电机组有功、无功输出特性在多种工况下的有效模拟。
[1]刘光德,姚兴佳,赵杨.变速风电机组仿真用数学模型研究[J].可再生能源,2006(2):52-54.Liu Guangde,Yao Xingjia,Zhao Yang,etal. Research of mathematical model in simulation of variable speed wind turbine[J].Renewable Energy,2006,(2):52-54.
[2]孙国霞,李啸骢,蔡叉明.大型变速恒频风电系统的建模与仿真[J].电力自动化设备,2007,27(10):69-72.Sun Guoxia,Li Xiaocong,Cai Chaoming.Modeling and simulation of variable-speed wind generator system with large capacity[J].Electric Power Automation Equipment,2007,27(10):69-72.
[3]许寅,陈颖,梅生伟.风力发电机组暂态仿真模型[J].电力系统自动化,2011,35(9):100-107.Xu Yin,Chen Ying,Mei Shengwei.Review on wind turbine models for power system transient simulations[J].Automation of Electric Power System,2011,35(9):100-107.
[4]刘涛,叶小晖,吴国旸,等.适用于电力系统中长期动态仿真的风电机组有功控制模型[J].电网技术,2014,38(5):1210-1215.Liu Tao,Ye Xiaohui,Wu Guoyang,et al.An active power control model of wind power generating unit suitable for medium-and longterm dynamicsimulation ofpowergrid[J].PowerSystem Technology,2014,38(5):1210-1215.
[5]魏林君,迟永宁,赵建国,等.双馈变速风电机组低电压穿越控制[J].电网与清洁能源,2009,25(2):41-45.Wei Linjun,Chi Yongning,Zhao Jianguo,et al.Control of low voltage ride-through in doubly fed induction generators[J].Power System and Clean Energy,2009,25(2):41-45.
[6] Clark K,Miller N W,Sanchez-Gasca J J.Modeling of GE wind turbine-generators for grid studies[R].2009.
[7] Proposed Changes to the WECC WT3 Generic Model for Type 3 Wind Turbine Generators[R].2012.
[8]内蒙古电网典型风电机电暂态仿真模型研究及PSD-BPA程序开发[R].北京:中国电力科学研究院,2015.
[9]DL/T 1167—2012.同步发电机励磁系统建模导则[S].2012.
[10]王官宏,濮钧,陶向宇,等.电力系统稳定计算用国产700 MW水轮机调节系统建模及参数测试[J].电网技术,2010,34(3):101-105.Wang Guanhong,Pu Jun,Tao Xiangyu,et al.Modeling and parameter testing of governing system for domestic-manufactured 700 MW hydraulic turbine suitable to power system stability calculation[J]. Power System Technology,2010,34(3):101-105.
[11]赵红光,刘增煌,朱方,等.华中—川渝联网稳定计算用发电机励磁和调速系统的数学模型及参数[J].电网技术,2007,31(5):50-57.Zhao Hongguang,Liu Zenghuang,Zhu Fang,et al.Research on mathematical models and parameters of generator excitation system and governor system for stability analysis of interconnection of central china power grid with Sichuan-Chongqing power grid[J].Power System Technology,2007,31(5):50-57.
[12]吴涛,于啸,郭嘉阳,等.暂态稳定计算中双馈型风电机组模型与参数的实证分析[J].电网技术,2011,35(1):100-105.Wu Tao,Yu Xiao,Guo Jiayang,et al.Empirical analysis on model and parameters of grid-connected doubly fed induction generators in transient stability computation[J].Power System Technology,2011,35(1):100-105.
[13]付蓉,孙万鹏.基于轨迹特征分析的双馈风电机组参数识别[J].中国电力,2013,46(7):100-104.Fu Rong,Sun Wanpeng.Parameter identification of DFIG based on trajectory characteristic analysis[J].Electric Power,2013,46(7):100-104.
[14]潘学萍,温荣超,鞠平,等.双馈风电机组网侧控制器参数辨识的频域方法[J].电网技术,2015,39(3):634-638.Pan Xueping,Wen Rongchao,Ju Ping et al.A frequency-domain based method to identify parameters of grid side converter controller for doubly fed induction generators[J].Power System Technology,2015,39(3):634-638.