电传飞控系统地面维护检测方法研究与探讨
2015-04-03饶明波余云鹏杨杰红
饶明波,张 欢,曾 行,余云鹏,刘 欣,杨杰红
(中航工业洪都,江西 南昌330024)
0 引 言
当前,电传飞行控制技术已经应用于多种型号飞机,电传飞控系统采用了大量集成电子电路,使系统变得更加复杂[1]。因此,采用电传飞控系统的飞机,飞控系统BIT自检测以及日常地面维护检测显得尤为关键[2]。与机械操纵系统相比,电传飞控系统的故障检测手段和方法也发生了根本的改变。某型飞机采用飞控地面维护检测系统进行故障分析和定位,为飞控系统维护提供信息和依据。本文通过对该型飞机电传飞控系统组成原理和工作状态进行分析,研究和总结了该型飞机飞控系统地面维护检测方法,并提出了对电传飞控系统设计优化的建议。
1 电传飞控系统组成原理分析
某型飞机采用三轴、四余度、数字式、全权限电传飞行控制系统,并具有模拟备份系统。飞控系统的组成包括传感器子系统、飞控计算机子系统、伺服作动子系统、控显开关子系统。其中,飞控计算机是飞控系统的核心,通过运行在飞控计算机上的应用软件实现飞控系统输入输出信号的处理、余度管理、逻辑判断、控制律计算、伺服控制等实时工作任务,同时飞控计算机中运行的自检测软件能够实现飞控系统BIT自检测功能。飞控系统的模拟量、离散量、状态信息、故障信息都可以通过飞控计算机发送给飞控地面维护检测设备,飞控系统地面维护检测设备能够实时监控飞控系统当前的各种状态信息。飞控系统组成原理如图1所示。
某型飞机电传飞控系统工作模态包括实时任务工作状态和自检测工作状态。其中,飞控系统实时任务工作状态是指飞控系统进行信号处理、余度管理、逻辑判断、控制律计算、伺服控制等一系列实时运行应用程序的工作状态,在实时任务工作状态下,可以通过飞控系统实时任务检测软件(FTI软件)监控飞控系统的工作和故障状态信息。飞控系统自检测工作状态是对飞控系统自身状态完好性进行测试的过程,包括对飞控系统上电自检测(PUBIT)、飞行前自检测(PBIT)、飞行中自检测(IFBIT)和维护自检测(MBIT)四种模式,若飞控系统自检测后存在故障,则可通过飞控系统自检测地面维护软件 (MBIT软件)下载故障代码信息[3]。
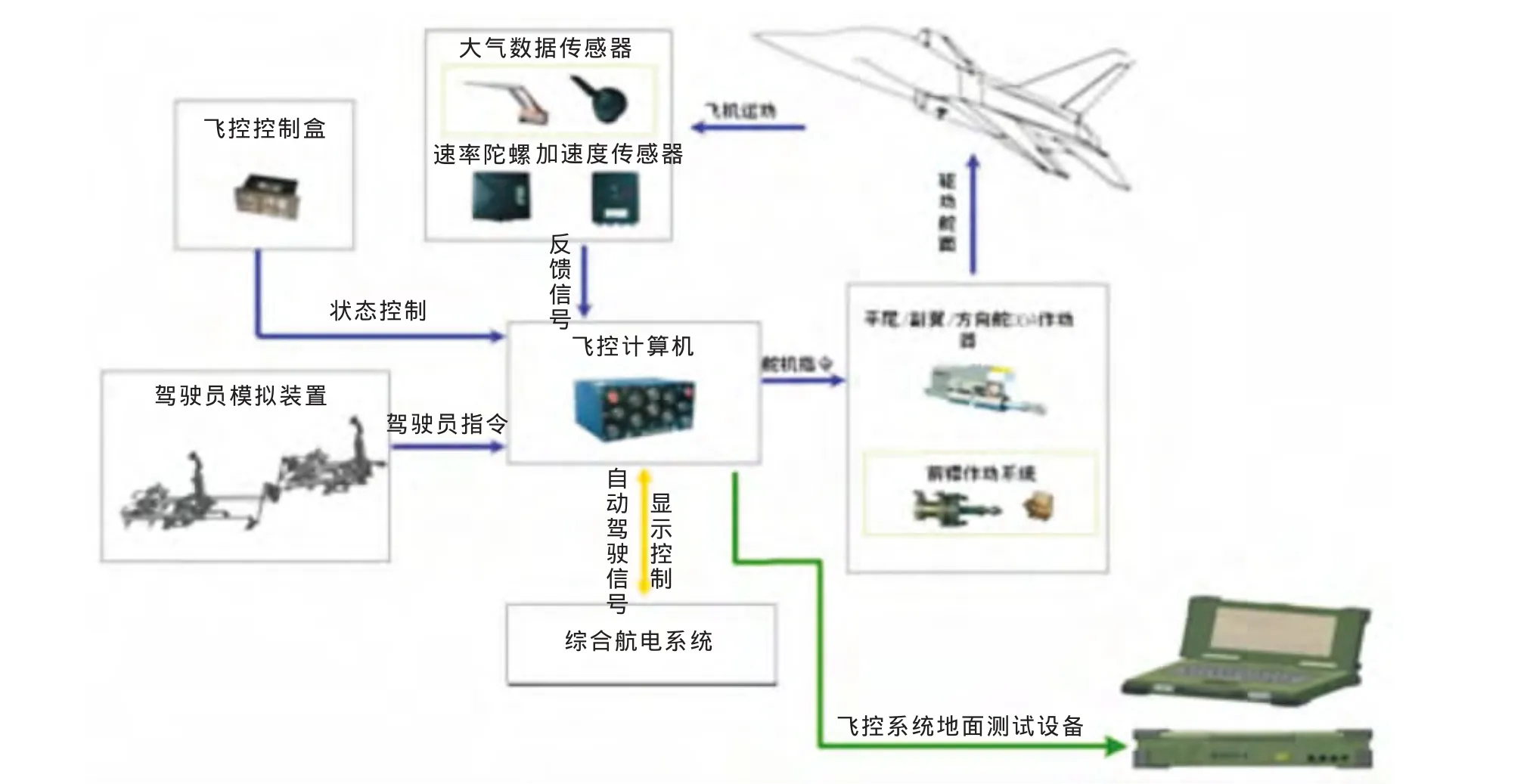
图1 电传飞控系统组成
2 电传飞控系统故障检测分析
某型飞机电传飞控系统具有故障综合处理能力,飞控计算机将采集的所有故障部件的信息转换成故障代码,通过总线信号分别发送给综合航电显示、机电记录和飞控系统地面维护系统检测,其中,综合航电显示系统主要用于飞行过程中为飞行员提供飞控系统主要状态和故障信息的显示。而飞控系统地面维护以及详细分析系统故障原因,则需要通过飞控系统地面维护检测设备的 “FTI/MBIT”软件,实现飞控系统详细工作状态和故障信息的检测,以及飞控系统BIT自检测后故障信息的下载[4]。
通过飞控系统地面维护检测设备可实现对该型飞机电传飞控系统的所有故障的实时检测,故障检测方式简单、便捷。但是,由于该型飞机电传飞控系统体系架构以及故障申报机制等固有的原因,在进行飞控系统故障检测定位时,仍然需要结合一定的人工分析过程。
某型飞机电传飞控系统组成部件故障示意如图2所示,图中红色的部分表示故障的部件。从对图2以及系统的故障申报原理分析可以得出,通过飞控系统地面维护检测设备申报某故障的原因可能是某部件本身的故障,也可能该部件是与飞控计算机之间连接线缆的故障,或者是飞控计算机 (对应接口板卡)导致申报故障。因此,对于飞控系统地面维护检测设备申报的故障,需要通过综合分析的过程,来确认故障的原因。
鉴于以上分析,本文研究了该型飞机飞控系统故障检测和定位的方法步骤。
3 电传飞控系统故障检测方法
3.1 故障检测工具
飞控系统地面维护检测所需的工具包括:飞控系统地面维护检测设备(1台)、检测线缆(若干)。检测设备及测试连接示意如图3所示。
飞控系统地面维护检测设备可作为该系列飞机一线保障设备,该设备集成了飞控系统实时任务检测(通过FTI软件实现)和飞控系统自检测地面维护(通过MBIT软件实现)两部分功能。FTI软件监控飞控系统实时工作状态下的各类参数,检测内容包括飞控系统模拟量信号、离散量信号、故障编码、工作状态字信号等,适用于飞控系统通电检查、故障检测、系统维护等。MBIT软件主要用在飞控系统BIT自检测后对飞控系统故障信息的下载,适用于飞行前检测、通电检查故障检测、系统维护。
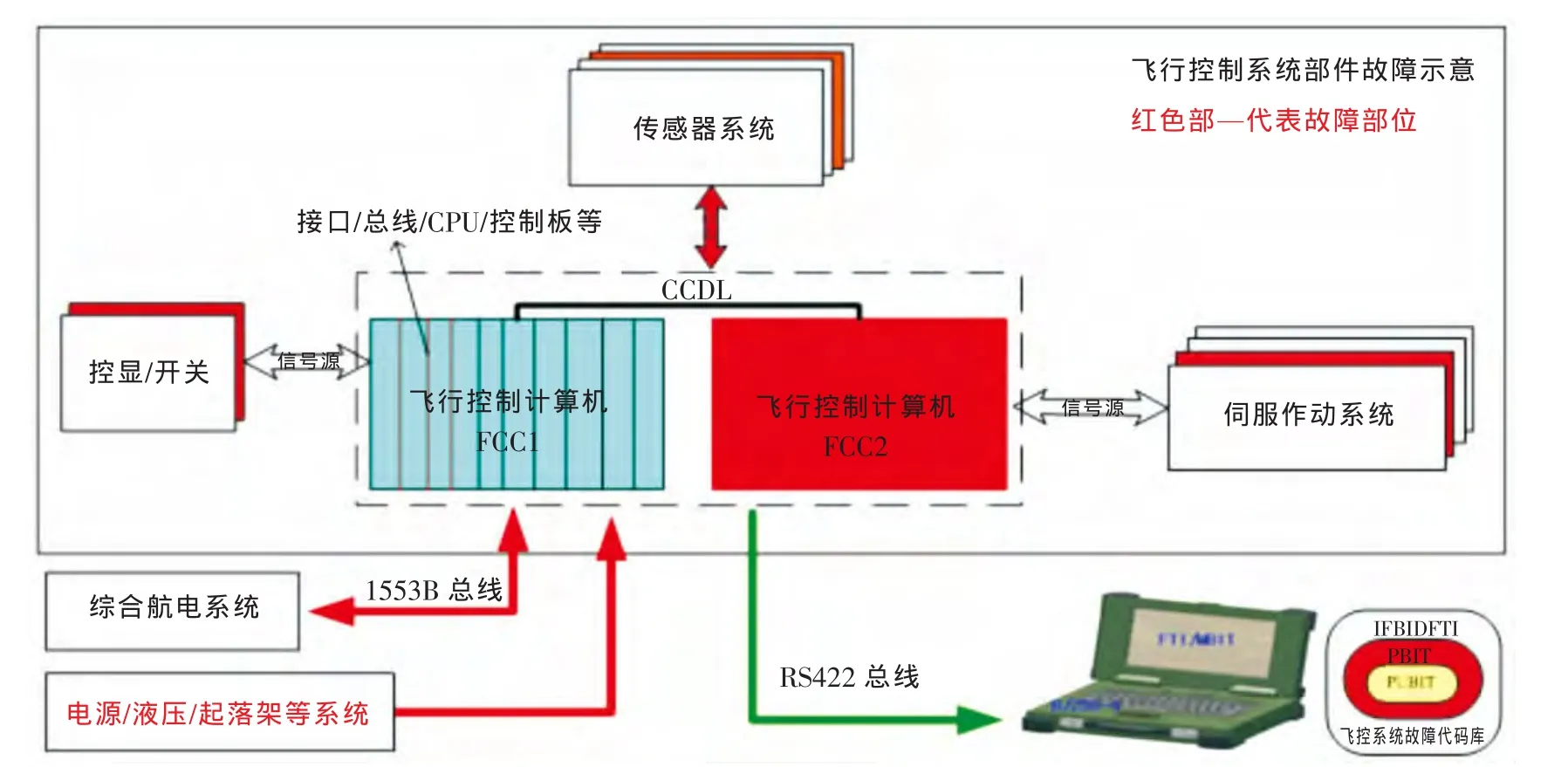
图2 飞控系统故障部件示意

图3 检测设备及测试线缆
3.2 故障检测方法
电传飞控系统高度综合,对电传飞控系统的维护和故障检测,首先需要熟悉系统的组成和工作原理,此外,丰富的故障排除经验也更有助于对故障的准确定位。该型飞机电传飞控系统的故障检测过程方法如下所示:
1)故障申报
若飞控系统存在故障,则系统上电、自检测以及实时任务工作时,都会通过综合航电显示装置、告警装置以及飞控地面维护检测设备申报故障信息。
2)故障确认
若发现飞控系统已经申报了故障,下一步工作则需要复现故障,排除虚警故障,对故障进行确认。主要方式是通过飞控系统地面维护检测设备的FTI和MBIT软件分析和确认故障,步骤如下:
(1)连接飞控地面维护检测设备;
(2)启动飞控系统/飞控检测设备;
(3)通过MBIT软件下载故障信息;
(4)通过FTI软件分析故障信息。
3)故障定位
排除虚警,确认故障后,并不代表已经找到了故障源。下一步的工作应当将故障定位到具体的LRU部件,以便于更换故障部件,恢复系统正常。具体过程如下:
(1)检查显示的故障部件单元与飞控计算机的连接线,确认是否是由于连接线缆接触不良或断了导致的故障;
(2)更换显示的故障部件单元,可以确认是否由于部件本身的原因导致的故障;
(3)对于是由于飞控计算机 (相应接口板卡)引起的故障,可以通过更换飞控计算机或左右互换飞控计算机进行故障确认。
在故障定位的过程中,对作动器、飞控计算机等子系统的部件进行拆卸、更换和恢复的工作极量大,而且这些部件的连接插头比较多,拆卸过程容易导致意外损坏。因此,通过对这些部件工作原理的分析,为了快速定位故障,研制了“辅助检测线缆”进行故障定位。在不拆卸故障部件的基础上,可通过辅助检测线缆交叉更换不同通道的信号指令,辅助故障判断。辅助检测线缆包括前襟、副翼、平尾和方向舵的辅助检测线缆,如图3所示。
4)故障排除
故障定位后,则应通过对故障部件进行更换或修复故障连接线缆等方式排除故障。系统故障排除并恢复后,进行飞控系统自检测,确认飞控系统恢复到正常状态。
某型飞机电传飞控系统故障检测主要步骤如图4所示。
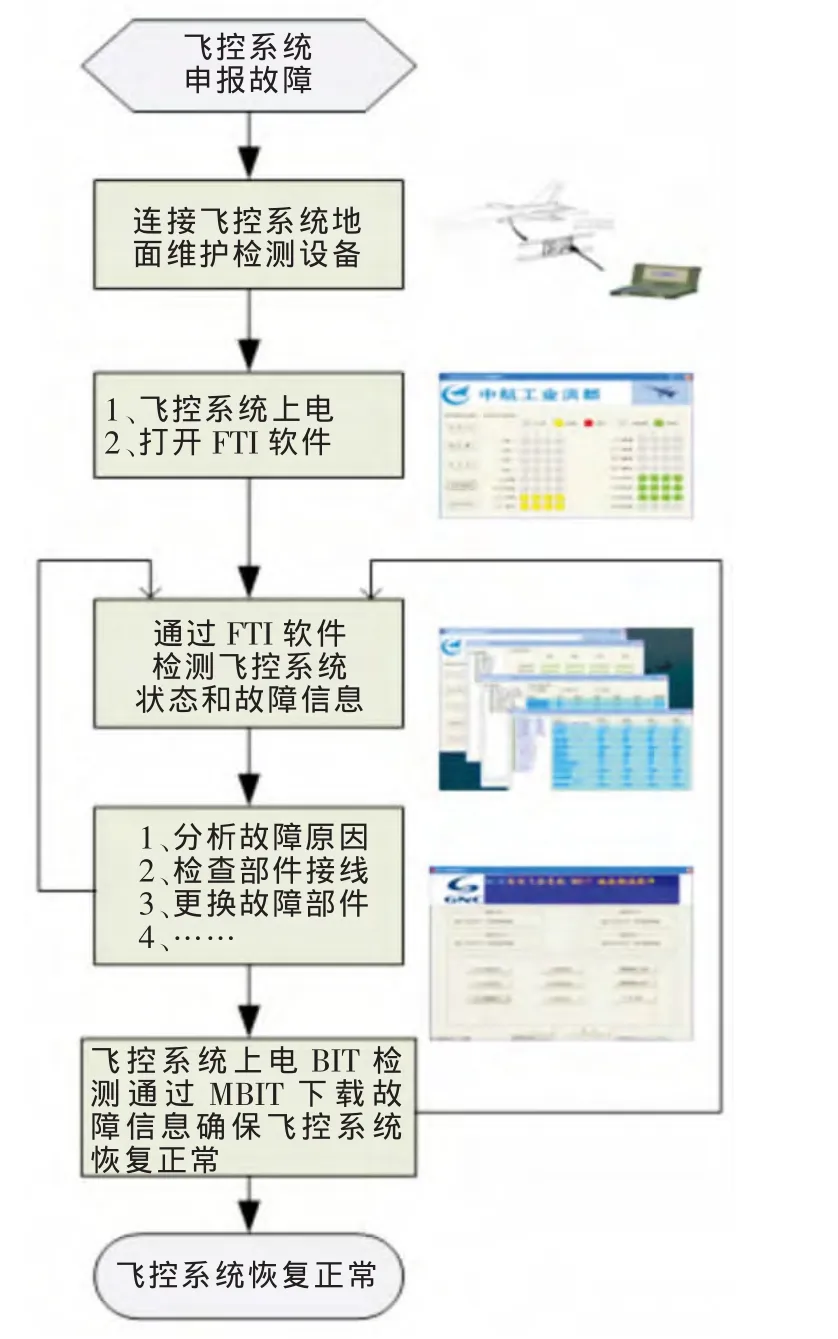
图4 飞控系统故障检测流程
3.3 故障检测示例
下面通过一个典型的故障案例,分析该型飞机电传飞控系统故障检测和定位的过程,以及“辅助检测线缆”的使用方法。
例如,通过飞控系统地面维护检测设备发现飞控系统申报“右平尾作动器电气AB通道故障”,其他通道无故障。
通过对系统的组成原理分析可知,右平尾作动器的供电、作动筒的位移传感器、DDV阀位移传感器等电气部件都可能引起 “右平尾作动器电气通道故障”,可能故障的LRU单元分别是飞控计算机和右平尾作动器。但是,现有的检测手段无法直接提示是飞控计算机相应的板卡故障,还是右平尾舵机故障,或者是两者之间的连线故障。
1)故障分析步骤
(1)通过FTI/MBIT软件再次确认故障,排除虚警。其软件故障界面如图5所示,若仍有故障,则进行下一步检查。

图5 FTI/MBIT软件故障界面
(2)检查飞控计算机至右平尾舵机端的连接线缆是否导通,对应针脚查看相应的《某型飞机电传飞控系统接线图》。若某根线缆不导通,则维修更换线缆后返回步骤1检查。若线缆都导通良好,则进行下一步检查。
(3)对于拆卸简单的部件,可通过更换LRU部件准确确定故障源。但是,对于平尾作动器和飞控计算机等拆卸工作量极大的部件,则可通过“辅助检测线缆”进行故障定位。
2)辅助检测线缆
本案例可通过平尾“辅助检测线缆”,辅助故障检测。辅助故障检测原理是将无故障通道与故障通道的指令信号通过“辅助检测线缆”交叉互换,其中,互换检测接线方式如图6所示。前襟、副翼、方向舵的“辅助检测线缆”使用方法类似。
(1)若“辅助检测线缆”交叉互换后,FTI软件仍然申报右平尾AB通道故障,则可确定为对应通道的飞控计算机故障,更换故障飞控计算机;
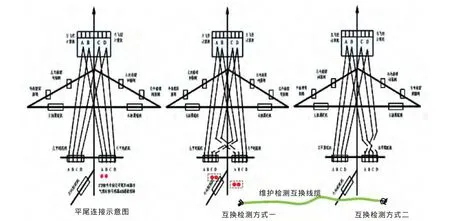
图6 平尾辅助检测线缆接线示意图
(2)若“辅助检测线缆”交叉互换后,FTI软件申报的故障转移到左平尾CD通道(方式一)或右平尾CD通道(方式二),则可确定为对应的平尾作动器故障,更换故障的平尾作动器。
(3)若“辅助检测线缆”交叉互换后,还存在其他现象,则需进一步分析故障原因或逐步更换可能的故障LRU部件后再检查。
4 结 语
通过某型飞机电传飞控系统外场维护发现,电传飞控系统的故障检测和维护主要依靠飞控系统自身的故障申报及地面维护检测软件。但是,通过飞控系统地面维护检测设备申报的某些故障,其故障源又可能是多方面原因引起的。主要原因是该型飞机采用的集中式飞控系统架构,飞控计算机承担了接口、计算、伺服控制、二次供电等功能,容易因飞控计算机接口板、伺服板和电源板等原因而申报对应关联系统的故障。因而,增加了系统故障定位和排除的困难以及系统维护的工作量。
因此,在后续电传飞控系统设计时,应综合考虑飞控系统体系架构对系统故障检测和维护影响。例如,LRU部件的功能应采用模块化、独立化设计,便于故障定位和维护,避免某些部件集中了过多的功能而增加部件复杂性和故障定位和维护的成本。此外,还应通过对系统和部件故障申报机制的研究,提高飞控系统故障申报的准确性,降低故障定位的难度。
[1]段江涛.机载飞控计算机机内自检测方法的研究.计算机测量与控制,2011,19(8).
[2]唐建生.基于设计模式无人机通用MBIT内核设计.计算机测量与控制,2012,20(3).
[3]王静.飞控系统故障诊断技术研究及软件开发.西北工业大学,2007,3.
[4]孙学初.无人机飞控系统故障诊断专家系统设计.装备制造技术,2012(2).
