基于传感器模式噪声特性的图像篡改检测方法*
2015-04-01杨本娟黎小平
杨本娟,黎小平
(1.贵州师范大学 数学与计算机科学学院,贵州 贵阳550002;2.江西财经职业学院 信息工程系,江西 九江332000)
0 引 言
相机成像过程中必然会产生噪声,所以,对图像噪声的分析和利用在图像篡改检测中具有十分重要的意义。图像噪声主要包括:媒介噪声、暗电流噪声、光电噪声、器件噪声、电子噪声等。其中,器件噪声主要是由于相机的CCD传感阵列的表面存在缺陷、光学器件中玻璃材料的折射率分布不一致、材料中有非透明的微小颗粒等多种原因产生。由于图像传感器是数码相机中最核心的器件,也是图像数据的直接来源,所以,通常假设相机内部的噪声主要来自CCD。
目前,基于图像噪声特性的篡改检测算法已经取得了一系列的研究成果。其中典型的思路是,通过计算指定相机的传感器模式噪声与待测图像残余噪声的相关性来判断图像是否篡改[1]。此类算法假设了图像噪声的最主要成分是相机的模式噪声,因此,可以通过对指定数码相机拍摄的多幅图像的学习,获得相机模式噪声的参考模板,然后利用待测图像的残余噪声与噪声参考模板之间的相关性来判断待测图像或图像块是否来源于指定相机。此类算法本质上是“半盲”的图像篡改检测算法,即当图像的获取设备信息无法获得时,这类检测算法将无法实施。这类算法的“半盲性”限制了图像噪声在图像篡改检测中的应用范围。
针对传统算法由于需要知道参考图像数据库因而应用局限性大的问题,本文提出了一种基于子空间投影的篡改检测框架,实现了基于主成分分析(principal component analysis,PCA)、二 维 主 成 分 分 析(two-dimensional PCA,2DPCA)和核主成分分析(kernel PCA,KPCA)的噪声特征提取和图像篡改检测,并通过实验验证了这些算法的可行性。
1 传统基于图像噪声特性的篡改检测方法
由于数码相机在成像过程中必然会产生噪声,相机在拍摄照片时会将这一噪声信息添加到数字图像中,因此,检测并分析图像的噪声能为图像篡改检测提供有力的凭据,具有十分重要的研究意义。目前,基于图像噪声特性的篡改检测算法获得了广泛的研究,并取得了一定的成果,其中,最常用算法流程如图1 所示[1]。

图1 基于图像噪声特性的篡改检测流程图Fig 1 Flow chart of forgery detection based on image noise characteristics
此类算法的具体检测步骤如下:
1)首先获取已知相机拍摄的多张原始可信图像,并建立参考图像集。然后提取该相机的噪声参考模板,模板提取方法通常采用最直接的方式,如式(1)

其中,q 为参考图像集中图像的数量,Ii(i=1,2,...,q)为图像集中的第i 个图像,FW为某种去噪算法,通常采用小波滤波器进行去噪处理,Wi为从第i 张参考图像Ii中提取的残余噪声,Y 为相机的噪声参考模板,是通过平均参考图像样本的残余噪声来抑制噪声的随机成分而获得的相机噪声的近似值。
2)采用相同的去噪算法对待测图像进行去噪处理,并用原始待测图像与去噪后的图像相减,从而获得待测图像的残余噪声。
3)首先对相机的噪声参考模板和待测图像的残余噪声进行相同的分块处理,然后,利用式(2)计算相机噪声参考模板与待测图像残余噪声中对应块的相似度,并给出判断
其中,矩阵Xj(j=1,2,...,n)为从待测图像中提取的残余噪声的第j 块图像噪声块,n 为图像噪声块的总数,Yj为对应相机噪声参考模板的第j 块相机噪声块和分别由Xj和Yj的均值构成,运算Y(a,b),噪声块大小为l×p,而由于相似度ρj越大,表示Xj与Yj越相似,从而表示待测图像的第j 个图像块是由此相机拍摄的可能性就越大。通常,当相似度大于某一阈值时,就认为对应的图像块是由该相机拍摄的;小于某一个阈值时,则认为对应的图像块不是由该相机拍摄的,从而就很可能是篡改区域。
检修盾构各系统以达到最佳状态,做好管片、砂浆、泡沫剂、油脂、易损配件、应急物资等材料物资储备,清空渣土池,保证盾构连续掘进施工。
上述算法框架简单可行,在图像篡改检测领域得到了广泛的关注,并取得了一定的应用成果。但由于相机成像的复杂性,提取的残余噪声通常显得很微弱,且容易受到图像内容的影响,这就使得基于模式噪声相关性的图像篡改检测算法的性能还有一定的提升空间。
由于该类检测算法对去噪方法存在一定的依赖,理论上如果能够采用合适且有效的滤波器,则可以获取更准确的噪声,从而提高图像篡改检测的性能。因此,部分学者从这个角度出发,研究了去噪滤波器在噪声检测算法中的影响,并取得了一定的效果[2,3]。但实际上由于噪声信号即弱又易受影响,再好的去噪滤波器也不可能得到实际需要的噪声,所以,部分学者又从另一个角度出发,采用噪声“提纯”的方法,提出了多种噪声增强检测算法[4,5]。但是,上述两个方面的研究都没有从根本上改变此类算法的半盲性。
2 基于子空间投影方法的图像篡改检测框架
针对上述算法存在的“半盲”问题,本文在假设一幅原始图像的残余噪声块属于某一噪声子空间的基础上,提出了一种基于子空间投影方法的篡改检测框架。本文认为,一幅图像的各个区域之间应具有某种由噪声引起和体现的“共性”,来源于其他图像的区域则不具有这种“共性”。因此,如果两幅不同的图像被拼接在一起(如图2 所示),则图像篡改区域和原始区域的噪声会有差异。

图2 篡改图像的示意图Fig 2 Diagram of forgery image
如图2 所示,通常一幅篡改图像是通过从原始图像B中裁剪得到需要的区域T,并将其复制后粘贴在背景图像A 中,从而得到一幅拼接图像C。
假设T 区域噪声不具有C 中其他区域噪声的“共性”,则令原始图像A 的残余噪声块属于某一噪声子空间,从而可以采用某种子空间方法构造出具有A 特性的噪声子空间F,即空间F 体现了A 中图像噪声块的“共性”。当获得篡改图像C 时,将C 的残余噪声块向空间F 进行投影,由于篡改区域T 的噪声不具备A 中图像噪声块的“共性”,因此,区域T 的残余噪声投影前后的差异较大,从而可以检测出T。实际上原始图像A 是未知的,只能得到篡改图像C,因此,只能从C 的残余噪声出发,构造出具有C 中大多数图像噪声块“共性”的噪声子空间V。同时,通常一幅篡改图像中,原始区域远远大于篡改区域,那么,通过待测图像噪声块建立的噪声子空间V 主要体现的是原始区域噪声的“共性”。当获得篡改图像C 时,将C 的残余噪声块向噪声子空间V 进行投影。由于篡改区域T 的噪声不具备C 中大多数图像噪声块的“共性”,因此,区域T 的残余噪声投影前后的差异最大,从而可以检测出T。
可见,本文算法直接从待测图像本身的残余噪声出发,并不需要知道参考图像数据库,采用某种有效的子空间方法,建立待测图像的噪声子空间,将图像噪声块向噪声子空间投影,通过比较图像噪声块投影前后数据的相似度实现篡改检测,其检测流程图如图3。
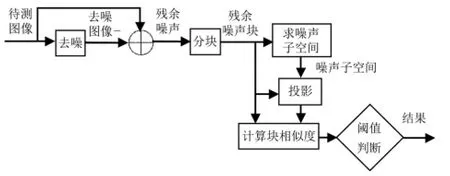
图3 基于子空间投影的篡改检测流程图Fig 3 Flow chart of forgery detection based on subspace projection
具体检测步骤如下:
2)对待测图像的残余噪声W 进行分块处理,从而获得n 个图像噪声块Xj(j=1,2,...,n)。
3)采用某种有效的子空间方法,利用图像噪声块Xj(j=1,2,...,n)获得噪声子空间。
4)将第j 个图像噪声块Xj向噪声子空间投影,获得对应的投影后图像噪声块Yj。
5)计算第j 个图像噪声块Xj与投影后图像噪声块Yj的相似度。相似度越大,此图像块为原始区域的可能性就越大。通常,当相似度大于某一阈值时,即认为对应图像块是未篡改区域;小于某个阈值时,则认为对应图像块可能是篡改区域。
综上所述,基于子空间投影的篡改检测算法真正实现了盲篡改检测,具有一定的实际应用意义。通过分析此算法的流程,发现最关键的问题是采用什么方法能更好地构造噪声子空间。针对这一问题,首先考虑了常用的子空间投影方法:PCA 算法和2DPCA 算法,其次,为了更好地挖掘隐藏在数据间的非线性结构,考虑KPCA 算法。
3 实验结果
为了对本文检测框架的有效性进行验证,实验采用哥伦比亚大学DVMM 实验室提供的彩色拼接图像数据库。实验中,利用Photoshop 对选取的原始图像(图4(a))进行篡改,篡改方式为:直接复制另一幅原始图像(图4(b))的部分区域粘贴到原始图像(图4(a))中,得到篡改图像(图4(c))。实验中,主成分个数设置为20,块大小设置为32×32,核函数选择指数核函数,且参数设置为0.87。分别采用PCA,2DPCA 和KPCA 实现图像篡改检测,得检测结果如图4(d)~(f)所示。实验结果显示了基于子空间投影的图像篡改检测方法是可行且有效的。
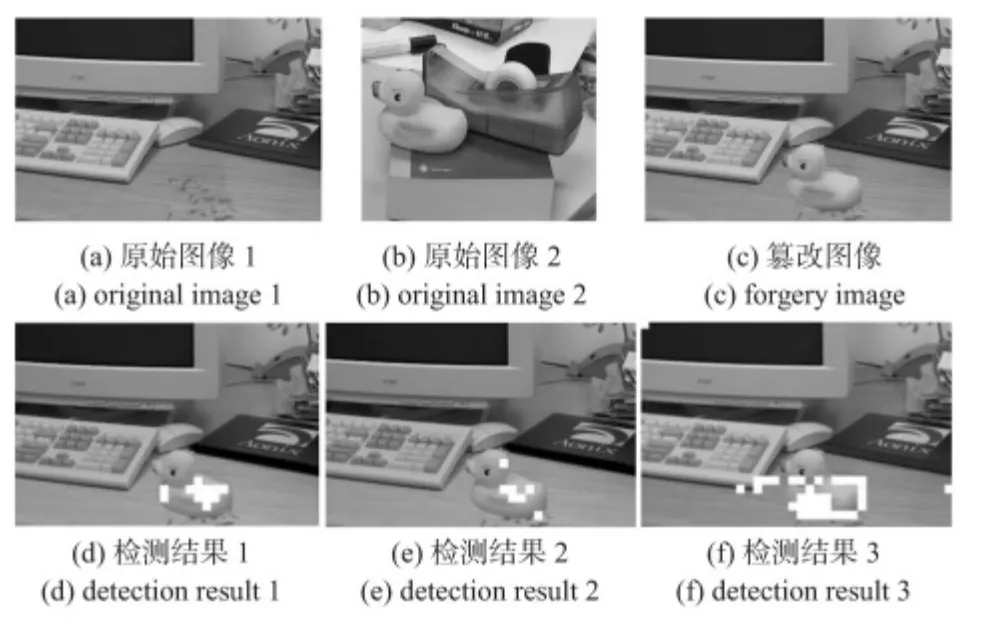
图4 图像篡改与检测结果Fig 4 Image forgery and detection results
4 结 论
相机拍摄照片的过程会将噪声信息添加到数字图像中,因此,检测图像的噪声能为图像篡改检测提供有力的凭据,具有重要的研究意义。本文首先通过研究现有基于图像噪声特性的篡改检测算法,分析了现有算法存在问题和发展方向。针对目前存在的“半盲”问题,提出了一种基于子空间投影的篡改检测框架,分别采用PCA,2DPCA 和KPCA 实现此框架,并通过实验验证了此算法的有效性。
[1] 崔夏荣,苏光大.基于噪音相关性的数字图像区域作伪检测[J].光子学报,2008,37(10):2108-2113.
[2] Argenti F,Torricelli G,Alparone L.MMSE filtering of generalised signal dependent noise in spatial and shift invariant wavelet domains[J].Signal Processing,2006,86(8):2056-2066.
[3] Dabov K,Foi A,Katkovnik V,et al.Image denoising by sparse 3D transform domain collaborative filtering[J].IEEE Transactions on Image Processing,2007,16(8):2080-2095.
[4] Li C T.Source camera identification using enhanced sensor pattern noise[J].IEEE Transactions on Information Forensics and Security,2010,5(2):280-287.
[5] Kang X G,Li Y X,Qu Z H,et al.Enhancing source camera identification performance with a camera reference phase sensor pattern noise[J].IEEE Transactions on Information Forensics and Security,2012,7(2):393-402.
