智能灌溉用电动蝶阀的多模式监控系统设计
2015-04-01李海波杨国华刘昌珍赵晓峰
李海波 杨国华 付 琛 刘昌珍 赵晓峰
(无锡商业职业技术学院物联网技术学院,江苏 无锡 214153)
0 引言
我国是产粮大国,但其生产方法的科技含量却很低,尤以灌溉模式最为突出[1]。目前,很多地区仍然依靠“经验模式”来决定灌溉的时间及需水量、依靠“人工模式”来手工启停泵、开关灌水阀。针对大面积农村集中示范地,若仍采用这种模式进行灌溉,一方面将导致田地的土壤湿度不能很好地与农作物的生长期要求相适应,另一方面还会造成由于忘记开关水阀而造成不必要的经济损失以及能量消耗。为此,设计一套智能化的电动蝶阀控制系统,不仅能按照农作物的生长需求智能化地控制阀门开度,还能解决远程监控蝶阀、方便操作等问题,同时还将更加有利于节水节电,具有较大的社会意义和实用推广价值。
1 电动蝶阀的多模式控制要求
(1)为了方便用户进行控制,有效地实现人机交互,该套控制系统需要支持蝶阀的手动与自动两种控制方式。
在手动方式下,蝶阀可以采用专用工具启闭,尤其在蝶阀出现故障时。在自动方式下,需要支持就地与远程控制两种模式。所谓就地控制,即农民在田头可以自由按下开启、关闭按钮对蝶阀进行自动控制;同时也能实时地观测到蝶阀当前所处的状态(开到位、关到位、开度等)。所谓远程控制,则能根据管理人员的权限对蝶阀进行控制(若是管理人员,则其具有最高权限,可以对蝶阀的使用权限进行设置,同时还能远程上网启闭蝶阀,观测蝶阀的状态;若是农民,则可以通过手机上网实现蝶阀的远程监测)。
(2)为了达到智能化的效果,在每块田地设置的就地控制装置需要能够实时反映当前农作物所处的生长环境(比如湿度、光照度、水位等),还能根据农作物的生长需求,对蝶阀开度进行智能化的控制,从而满足农作物对土壤湿度的需求。
2 蝶阀控制系统设计思路
为了满足上述蝶阀的控制要求,从人机交互方便、经济实用、安全可靠等角度考虑,这里采用如图1 所示的控制系统架构。

图1 蝶阀多模式控制系统结构框图Fig.1 Structure of the multi-mode control system for butterfly valve
从图1 可以看出,本系统主要采用基于无线宽带通信和以太网的分布式结构。在中心控制站和现场监控站之间形成3G 网络全覆盖,在现场监控站与就地控制柜之间采用RS-485 通信方式实现数据交换。其中,中心控制站主要实现远程蝶阀的状态监测、田间土壤参数、蝶阀远程控制、数据保存及相关信息管理工作;现场监控站主要是针对多组蝶阀进行自动控制以及状态指示等;现场控制柜主要针对现场单个电动蝶阀进行就地启停智能控制;手机3G 模块主要支持农民手机上网启停蝶阀以及对田间的状态监测。
3 蝶阀现场单片机模糊控制
3.1 蝶阀模糊控制的原理
由于电动蝶阀的调节特性为非线性,且阀门动作和土壤湿度检测具有一定的滞后性。因此其控制模型很难用精确的数学表达式来描述,采用标准的PID 也很难达到预期的农作物对土壤湿度的要求。由于模糊控制不依赖于系统模型,鲁棒性好,所以将这种控制方法引入智能节水灌溉用蝶阀控制系统中,不但能起到节水的效果,而且还能通过对作物进行合理的灌溉,更有利于作物的生长发育,达到增产的目的[2]。
所谓蝶阀的模糊控制,即对田间土壤湿度进行采集[3-4],经A/D 转化后,利用模糊控制器(这里采用单片机作为核心控制器)进行模糊化度量、识别,然后利用专家知识,结合农作物的生长需求,生成模糊规则推理,从而形成模糊决策,最后经过反模糊化输出精确的蝶阀开度,达到智能节水灌溉的目的。其模糊逻辑推理系统结构如图2 所示。

图2 蝶阀模糊控制系统框图Fig.2 Block diagram of fuzzy control system for butterfly valve
3.2 蝶阀模糊控制系统实现
3.2.1 参数模糊化
这里选用了系统检测的土壤实际湿度T 与土壤湿度给定值Td的误差以及误差变化率作为节水灌溉用蝶阀模糊控制系统的输入变量。根据农作物生长期的最佳土壤湿度需求,经过量化因子量化后,选择确定其ΔT、ΔET 模糊论域分别为[-1,1]、[-0.2,0.2],并将其都定义为5 个等级,分别为{负大,负小,零,正小,正大},分别对应于{NB,NS,ZO,PS,PB},其隶属度函数均选择高斯型。其中ΔET 的隶属度函数如图3 所示。

图3 模糊控制系统输入量模糊隶属度函数Fig.3 The fuzzy membership functions of ΔET
把阀门开度作为模糊控制器的输出变量,论域定义为[0,90](由于阀门全开需90 s);设定5 个模糊子集分别为{最小,小,适中,大,最大},隶属度函数取三角形。
3.2.2 模糊控制规则
蝶阀控制的原则为:当土壤湿度偏差大时,输出量要向尽量减小偏差的方向选取;当土壤湿度偏差较小时,输出量要向尽量保持土壤湿度稳定的方向选取,避免超调的情况出现。因此,最终在农学专家的指导下,结合当季农作物的实际情况,经过灌溉实验,合理地制定本系统的模糊控制规则如表1 所示。
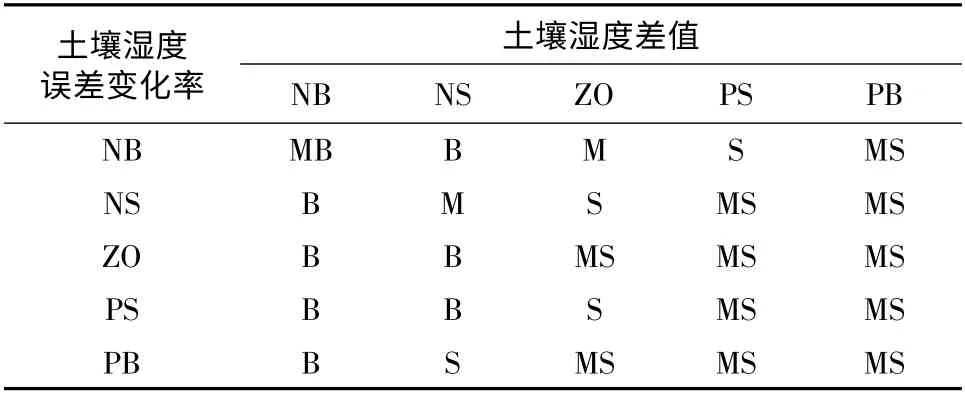
表1 蝶阀模糊控制规则Tab.1 Fuzzy control rules of butterfly valve
3.2.3 模糊控制软件实现流程
蝶阀的就地控制主要采用单片机为核心,通过利用外置的拨码开关进行参数设置(模式设定、设备地址、通信协议等)。每块农田选用5 只SWR-3 型土壤水分传感器作为土壤湿度采集器,借助于单片机内置的A/D 转换通道进行土壤湿度的采集与模数转换,从而通过判断当前控制柜的工作模式来进行参数设定,实现自动模糊控制或手工启停控制,并定时进行参数显示刷新。其软件实现的流程如图4 所示。
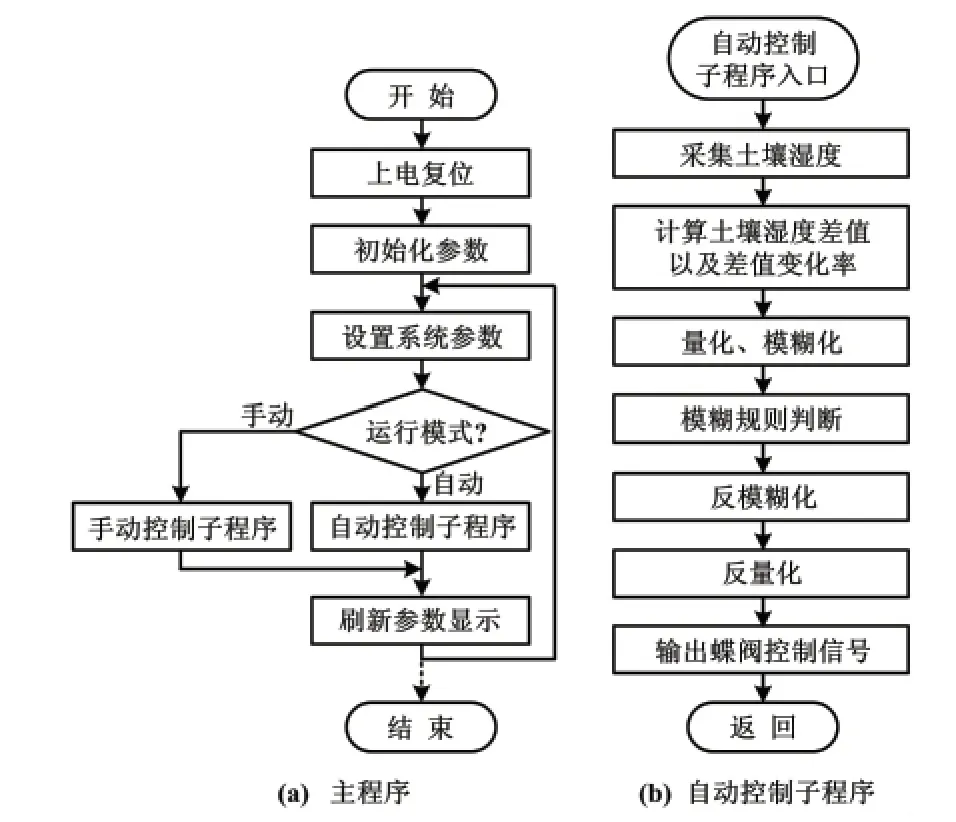
图4 蝶阀就地模糊控制软件实现流程Fig.4 The implementing flowchart of local fuzzy control software for butterfly valve
3.2.4 模糊控制效果
通过将该装置应用于苏州太仓某一农田示范基地现场,结果发现各块田地的蝶阀手工均能灵活启停控制,当置于自动控制模式时,其田间的土壤设定湿度与当前湿度变化趋势如图5 所示。

图5 田间的土壤设定湿度与当前湿度变化趋势Fig.5 The setting soil humidity and current humidity varying trend
4 蝶阀组触摸屏远程监控
4.1 蝶阀用单片机控制装置通信协议
蝶阀用单片机控制装置提供了RS-232 以及RS-485 两种通信接口模式。由于在现场监控站是针对某一片农田统一进行监控,因此在这个监控中心将涉及到多个单片机蝶阀控制装置数据上传与下发的问题。S7-200 系列的PLC 支持自由口通信模式,而所谓的自由口通信就是允许用户自己定义通信协议设置,如数据长度、奇偶校验等,其通信功能完全由用户程序控制[5]。因此,在此采用自由口通信的方式,实现PLC与多个单片机之间的数据通信,然后利用PLC 与触摸屏之间的以太网通信实现多个田地的蝶阀远程控制以及状态监测。这样,不仅降低了系统开发成本,而且应用方便。
开发的单片机蝶阀控制装置支持ASCII 码字符格式进行信号传输,其通信的协议为:<起始符(1 字节ASCII 码)、地址(2 字节ASCII 码)、数据长度(2 字节ASCII 码)、命令或状态(4 字节ASCII 码)、CRC 校验((4 字节ASCII 码)> 结束符(1 字节ASCII 码)),支持进行状态查询以及开关命令发送。
比如,PLC 若发送<0103020000B844 >,则代表PLC 需要查询1#蝶阀当前的状态;当单片机控制装置接收到此信息后,将返回一串信息,表明蝶阀是“正在开”、“正在关”、“开故障”、“关故障”、“开好”、“关好”等状态。PLC 若发送<0103020100B9D4 >,则代表PLC 远程关闭1#蝶阀,单片机控制装置接收到此信息后将立即动作。
4.2 蝶阀组远程群控系统设计
4.2.1 自由口通信实现
在S7-200 系列的PLC 中,进行自由口通信主要有两条指令:XMT 以及RCV,分别用于发送和接收数据[6]。在实现PLC 与蝶阀就地控制用单片机装置进行自由口通信时,主要采用下列流程实现:①首先进行接收参数的设置(起始字符、结束字符),启用发送、接收以及定时中断;②在定时中断产生时,由上位PLC 发送蝶阀状态查询或蝶阀启闭命令(即设置发送XMT 指令对应的缓冲区内容),并暂时分离定时中断;③当发送完成后,立即执行发送中断,即接收下位单片机控制装置发出的响应信息;④当信息接收完成后,启用接收中断,即对接收的信息进行分解,从而向触摸屏发送相关的蝶阀状态;同时启用定时中断。
在具体软件实现的过程中,主要需要解决好两大问题:①发送或接收信息时出现通信故障,应及时向触摸屏反馈信息,同时要立即禁用自由口通信,防止出现死机状态;②由于上位PLC 需要控制多个单片机蝶阀控制装置,所以在发送信息时需要进行通信协议的定义、信息字符串中校验码的计算。
4.2.2 蝶阀组远程触控系统设计
当PLC 与就地的蝶阀控制柜之间能够进行数据通信后,利用人机交互友好、动态效果较强、较为经济的昆仑通泰触摸屏TPC7062K 作为现场监控站的蝶阀监控HMI,通过CP243-1 以太网模块实现PLC 与HMI之间的数据通信,采用Modbus TCP/IP 协议实现HMI与手机3G 模块或上位计算机之间的信息交互,从而达到远程监控蝶阀的目的[7-8]。通过对画面的设计、数据变量的定义、设备的连接、策略的设置,设计出远程HMI 和手机上网监控工程。这套远程HMI 和手机上网监控软件不仅能够对蝶阀的使用状况进行设置,并能实时反映多组蝶阀的工作状态,同时还能检查蝶阀以及通信线路的故障并加以提示。
5 系统在太仓水利的应用
将设计好的蝶阀多模式监控系统应用于太仓农田灌溉时发现,该系统目前运行稳定可靠,蝶阀控制方式多样灵活,支持手机、监控站触摸屏监控以及就地的智能自动控制以及手工开关。同时,田间的土壤湿度与水稻生长期的最佳湿度要求相比,误差能够控制在±3.24%左右。与以往人工开关蝶阀方式进行灌溉的电能进行比较发现,泵阀不用长时间开启,其电能节约近0.008 kW· h/m2。
6 结束语
针对田间灌溉用蝶阀手动控制的缺陷进行分析研究,发现对蝶阀控制进行智能化的设计开发将有利于节约人力、物力以及财力,同时还有利于农作物的生长。为此,提出采用PLC、触摸屏以及手机模块等设备,利用多种工业通信模式实现了单个蝶阀的就地手自动控制、片区现场工作站的集中监控以及网上农田示范区的蝶阀工作状态监控等智能化的控制模式。同时,针对土壤湿度控制稳定性、精确度等问题,研究设计了一种基于模糊控制算法的土壤湿度智能控制。经过实际农田示范区的使用发现,该系统能够完全满足控制要求。
[1] 纪建伟,邓巍巍,赵毅勇.基于PLC 的稻田灌溉自动控制系统[J].沈阳农业大学学报,2013,44(3):257-261.
[2] 匡迎春,沈岳,段建南,等. 模糊控制在水稻节水自动灌溉中的应用[J].农业工程学报,2011,27(4):18 -21.
[3] 任玲,翟旭军,付东岳,等. 基于STC单片机的种苗催芽室温湿度监控系统设计[J]. 农机化研究,2015(3):157 -160.
[4]王丽,张华,张景林,等.基于Zigbee 和Labview 的土壤温湿度监测系统设计[J].农机化研究,2015(8):194 -196.
[5]李磊,齐向东,逄东,等.基于PLC 与PC 自由口通信的蝶阀气密性检测控制[J].机械管理开发,2009,24(1):188 -190.
[6] 李海波,徐瑾瑜.PLC 应用技术项目化教程(S7 -200)[M]. 北京:机械工业出版社,2012.
[7] 寇恒.西门子PLC 与HMI 的以太网通讯的应用[J]. 天津职业院校联合学报,2014,16(5):51 -52.
[8] 黄建军,陈西曲.基于Modbus TCP/IP 通信的研究与实现[J].信息技术,2014(5):162 -164.
