铍青铜倾角传感器及其线性度补偿*
2015-03-30王宏伟
王宏伟
(北京信息科技大学,北京100192)
0 引 言
倾角传感器在农业、地质、军事、水利、海洋、工程建筑、电子产品等领域有广阔的应用[1~3]。“三明治”式差动电容检测结构非常适合设计制作倾角传感器[4]。差动电容可以消除干扰,并受温度影响较小,灵敏度高,结构制作工艺简单[5]。
模拟倾角传感器在实际应用中往往存在较大的非线性误差,线性化程度不好。所以,需要进行线性化的补偿,硬件补偿法的精度有限,电路复杂,成本较高[7]。随着单片机和ASIC 技术的不断进步和完善,其制造成本也越来越低,使软件补偿法成为更好的选择[8]。
铍青铜材料弹性好,密度大,耐疲劳,适于做惯性振动元件。本文提出了用铍青铜材料作为弹性振动元件,制作得到“三明治”电容敏感式倾角传感器,并对其进行了软件线性度补偿,传感器线性度得到改善。
1 传感器结构
如图1 所示,中间是铍青铜振动元件,包括质量、弹性梁和外框,左右两边为覆铜有机板,铍铜质量和左右极板间有间隙,形成电容器C1 和C2。传感器发生倾斜时,两个电容发生一大一小的变化,通过交流电桥可以测出电容变化的大小,倾角的大小就可以测得[9]。

图1 倾角传感器敏感头结构Fig 1 Structure of sensing head of tilt sensor
倾角传感器信号处理电路主要是将差动电容的变化转换为电压,其原理如图2 所示。信号处理电路由高频发生器、电桥、放大电路组成。
根据铍青铜弹性振动元件实物尺寸,把它分成几个区域,如图3 所示,质量包括A,B,C 三个区域,D 区域为弹性梁。
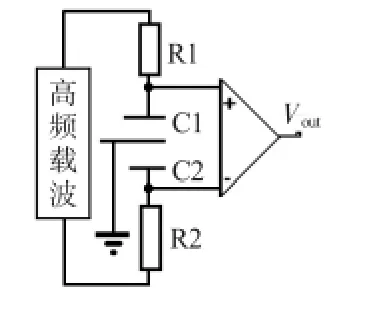
图2 信号处理电路Fig 2 Circuit for signal processing
a0=19.69 mm;a1=16.07 mm;a2=13.83 mm;a3=4.09 mm;a4=1.78 mm;b0=19.77 mm;b1=16.03 mm;b2=14.88 mm;b3=9.06 mm;b4=1.05 mm;铍青铜质量厚度h1=0.50 mm;弹性梁厚度h2=0.10 mm。铍青铜密度ρ=8.3×103kg/m3。
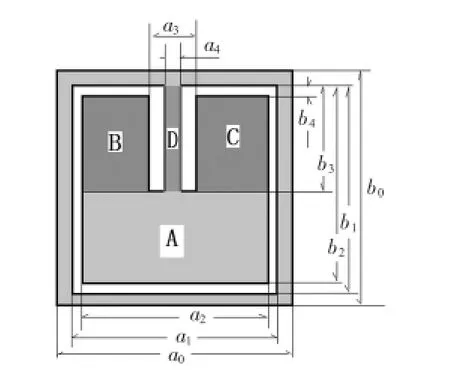
图3 铍铜弹性元件几何结构Fig 3 Geometric construction of beryllium copper elastic element
2 力学分析
如图4 所示,当传感器倾斜α 角时,铍青铜元件偏离β角度,铍青铜元件相对于重垂线的偏角为α-β。

图4 敏感头倾斜后铍青铜元件偏离情况Fig 4 Deviation of beryllium copper element after sensing head tilt
倾斜时铍青铜对于梁根部产生的重力力矩可分为两个部分A 部分、B 和C 部分,A 部分产生的力矩为

式中 lA为A 部分中心到弹性梁根部的距离,且

B,C 部分产生的力矩和为
弹性元件质量产生的力矩和为

对于方形条状结构,在受力矩作用下,产生弯曲,如图5所示。弯曲形成的曲率半径r 为

其中,E 为弹性模量,Iz为惯性矩,且
式中 b 为条形结构的宽度,h 为厚度。由于

将式(2)代入式(3)得

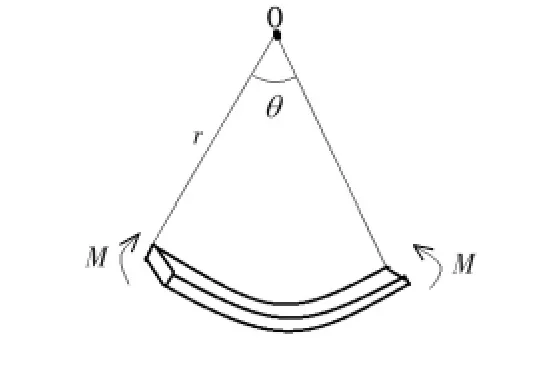
图5 方形条状结构在弯矩作用下受力Fig 5 Square shaped structure stress under bending moment
将式(1)代入式(3)中,并考虑到θ=β,l=b3,b=a3,得

由于β≪α,故

整理式(5)得
在小偏角的情况下

整理得

将结构尺寸代入式(5),得

上式结果适于小倾角情况。对于在较大倾斜角情况下,只能通过实验测试值对传感器进行标定。
3 敏感头制作与性能测试
敏感头制作的主要工艺过程:1)线切割振动元件;2)腐蚀铍青铜弹性梁;3)制作电极;4)粘接。
完成敏感头制作后,分别将做好的敏感头标号,如图6所示。
图6 敏感头Fig 6 Sensing head
将敏感头两边用塑料方块粘接,以便稳定放置在被测物上。制作了10 个易放置的敏感头,并进行了编号,如图7所示。
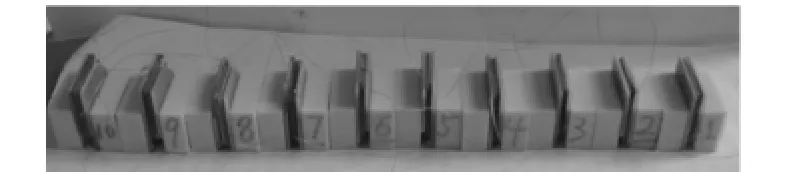
图7 倾角传感器敏感头Fig 7 Sensing head of tilt sensor
选择了5 只传感器,分别电路组合起来,在光学分度平台上进行测试,测试结果如表1。
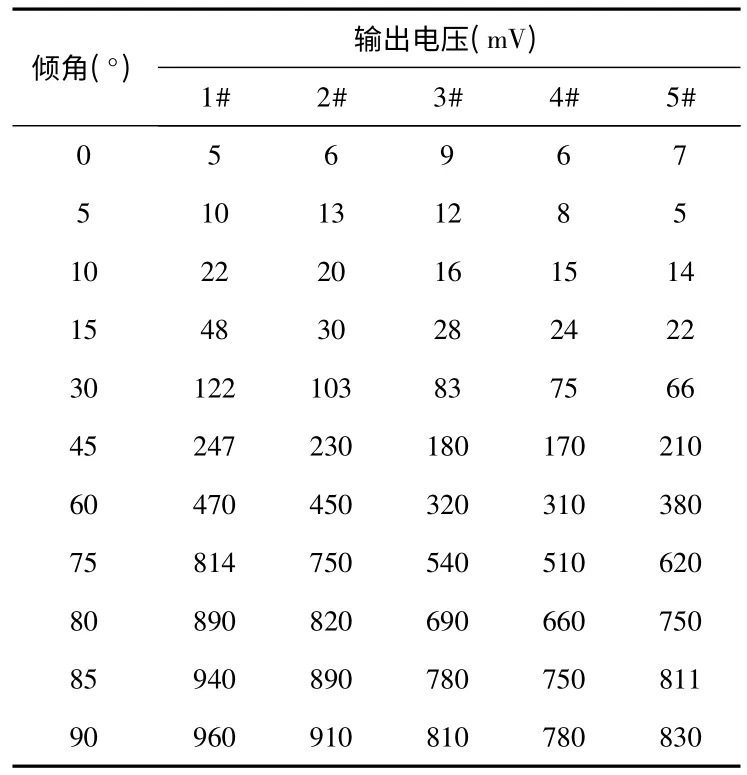
表1 不同倾斜角度下传感器的输出电压Tab 1 Output voltage of sensor in different tilt angle
从实验数据看出:倾角传感器的比例系数平均值大约为16.4 mV/(°)。
4 线性度补偿
倾角传感器在整个量程内,输入角度和输出电压之间的非线性较大,需对传感器的线性度进行软件补偿。用中颍单片机公司的SH796431,该单片机内置10 位A/D 转换器,分辨率高、转换速度快。
将倾角传感器输出的模拟信号通过单片机A/D 口采样,和单片机中已写入的数据表中的数字进行比较,可以输出正确的数字信号。
这里只选了2#传感器,对其进行软件的线性化。单片机线性化软件程序如图8 所示。
用单片机补偿处理过的倾角传感器置于倾角台上,进行测试并数字输出,如图9 所示,数字显示如图10 所示。
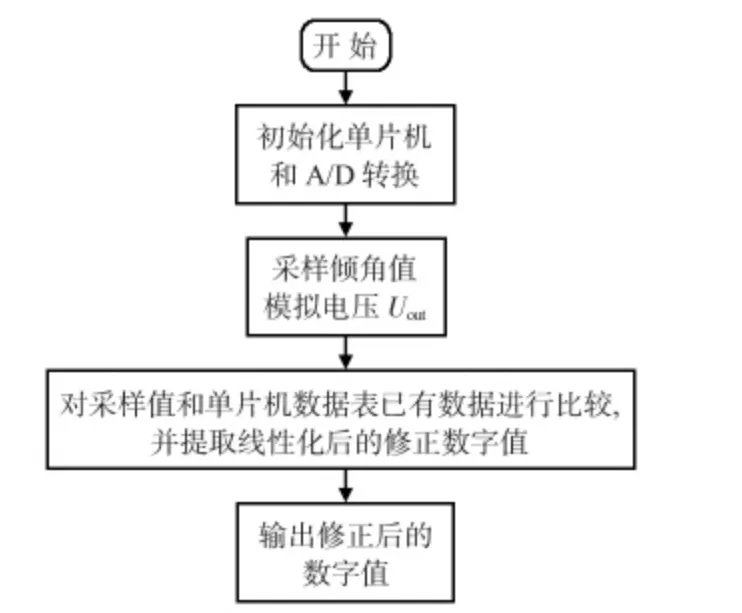
图8 单片机处理原理Fig 8 Processing principle of MCU
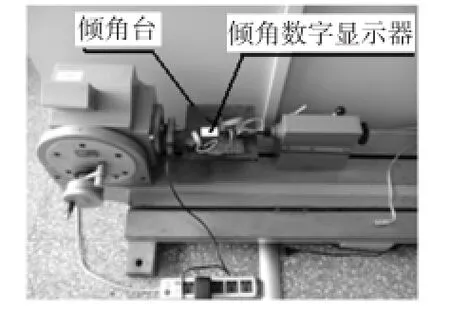
图9 线性补偿后倾角测试Fig 9 Tilt angle test after linear compensation

图10 倾角数字显示Fig 10 Tilt angle digital display
用端基直线法把2#传感器的特性曲线作线性化处理,如图11 所示。图中系列1 为特性曲线,系列2 为线性化后的拟合直线,系列3 为经过单片机软件补偿后的输出曲线。

图11 2#传感器的线性化Fig 11 Linearization of 2#sensor
对补偿后的2#传感器进行测量,以数字值直接输出倾角角度。经测量2#传感器的实际测试值和数字输出值如表2 所示。
经过补偿,线性度得到较大的提高,但如表2 所示,实际被测量和测试结果还有差距,最大差距达到6°。
传感器输出信号的线性度补偿的好坏依赖传感器敏感头的稳定性。

表2 2#倾角传感器测试结果Tab 2 Test results of 2#tilt sensor
5 结 论
本文利用铍青铜材料优良的弹性特点,加工制作成振动元件,和上下电极构成“三明治”结构,形成电容敏感式倾角传感器敏感头。将电路和敏感头组合起来进行系列测试,得到了输出曲线。对传感器进行软件补偿,使线性度得到很大的提高,从而也提高了传感器的输出性能。
[1] 伍伟斌,纪洪广,陈建康.数字开关式倾角传感器设计[J].传感器与微系统,2013,32(12):107-109.
[2] 隋洪江,周 滨.电容式倾角传感器在底盘悬挂系统中的应用[J].传感器与微系统,2012,31(6):150-152.
[3] Lin D W.Design of dual-axis inclinometer based on MEMS accelerometer[C]∥Proceedings of The 3rd International Conference on Measuring Technology and Mechatronics Automation,2011:959-961.
[4] 阮爱武,冯培德,郭秀中.硅微机械传感器的新进展及其方案分析[J].中国惯性技术学报,2010(2):1-9.
[5] 李敏毅,王 蕊.微机械电容式加速度传感器信号电路设计[J].传感器世界,2005(7):31-32.
[6] 陈烁辉,周 翔,王汉其,等.高精度倾角传感器检测系统的设计与实现[J].仪器仪表装置,2012(12):18-21.
[7] 吴秀芹,高国伟,李倩芸,等.倾角传感器自动标定系统的研究[J].传感器与微系统,2009,28(4):54-58.
[8] 陈 超,续志军.电容式倾角传感器的研究与应用[J].传感器与仪器仪表,2009,6(1):153-155.
[9] 王宏伟,江世宇,腾功清,齐臣杰.一种小型电容敏感式加速度计的研制[J].微纳电子技术学,2007(7/8):284-288.
