一种基于加样针结构的电容法液位检测系统*
2015-03-30郭阳宽祝连庆孟晓辰
杨 溢,郭阳宽,祝连庆,刘 超,孟晓辰
(北京信息科技大学 光电测试技术北京市重点实验室,北京100192)
0 引 言
液位检测是全自动临床分析仪器加样过程中的一项关键技术。基于加样针结构的液位传感器能够对样品杯或试剂瓶中的剩余液量进行检测,一方面可以避免缺液导致的空吸现象影响生物化学反应的检验结果;另一方面能够控制加样针探入液面的深度,最大限度减少加样针挂液现象引起的携带污染[1]。而液位检测的灵敏度和精度是决定其工作性能重要指标[2]。
电容法液位检测技术由于传感器结构简单、分辨率高,在生物医疗仪器中得到广泛应用。生化分析仪、酶免分析仪等临床分析仪器中常采用电容/电压(C/V)转换法进行液位传感器的电容测量[3]。该方法将待测电容量转换为模拟电压量,信号采集、处理过程易受各种噪声和电机运动干扰,从而影响其测量结果。
本文采用电容/周期(C/T)转换法将电容量转换为数字脉冲周期来进行测量,增强了信号的抗干扰能力,使检测结果更加稳定、可靠,从而实现了高灵敏度和高精度的液位检测。
1 探针式电容传感器结构与工作原理
使用电容法实现液位测量,首先要构建电容传感器。探针式电容传感器结构如图1 所示,主要由金属管加样针、试剂瓶、金属槽、步进电机、齿轮齿条、槽型光耦等部分构成。
步进电机固定于加样臂上,驱动加样针上下运动。加样针上的挡片至针尖距离为L。挡片和加样臂上的槽型光耦确定针尖初始位置。加样针尖自初始位置运动的距离记为s1,它与电机运行步数呈正比。初始位置至针尖下降最大深度之间距离为H,初始位置至液面之间距离为s2,液面至加样针尖下降最大深度之间距离定义为液位高度h,则h=H-s2。

图1 探针式电容传感器结构示意图Fig 1 Structure diagram of probe-type capacitive sensor
探针式电容传感器采用单端接地接法:加样针等效于一个金属电极,它与试剂瓶下的接地金属槽构成了电容传感器。此传感器基于金属电极的近场效应工作,加样针接触液面之前,它与金属槽构成的电容器中间介质为空气、液体和试剂瓶;当加样针进入液体时,介质发生改变,因此,加样针与金属槽之间的电容值发生变化。对于这种单端接地的加样针式电容传感器,无论是液面接触之前还是之后,加样针与介质接触面的变化对电容的影响微乎其微,而液面接触瞬间导电介质变化对电容的影响起到主要作用,且变化显著,可作为加样针接触液面的判断依据[4]。
液面接触瞬间,读取电机运行步数即可换算出液位高度h。对于液面高度的检测,采用步进电机运动系统进行测定,相比使用电容传感器进行液位连续测量具有更高的精度和线性度[5]。
2 C/T 转换法电容检测原理
加样针运动过程中传感器的电容变化使用C/T 转换法进行检测。本文采用施密特触发器构成的多谐振荡器实现C/T 转换,转换原理如图2 所示。
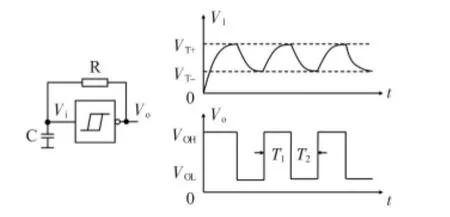
图2 施密特触发器构成的多谐振荡器Fig 2 Multivibrator constitute of Schmitt trigger
施密特触发器的输入信号电压增加和减小过程中引起输出信号跳变的阈值电压不同,(如图2 所示VT+和VT-),因此,亦称滞回比较器。由于RC 电路充放电效应和施密特触发器的滞回效应,图2 所示多谐振荡器电路中施密特触发器输入信号在两个阈值电压之间以指数规律振荡变化,输出信号为固定周期的方波脉冲。通常,CMOS 型施密特触发器的输出高低电平分别为VOH≈VDD,VOL≈0,则由图2所示波形可得电路的振荡周期为

由式(1)可知,输出信号的周期T 与电阻R 和待测电容C 呈正比,选取合适的电阻R 可调节输出信号周期,使其在系统测量范围内。
该方法把电容传感器作为振荡器的一部分实现自激振荡,因而无需额外的激励信号,电路结构简单;输出为幅值恒定而周期变化的数字脉冲信号,无需采取信号放大、滤波等措施,且增强了信号传输过程中抗干扰能力;另外,由于信号频率很高,可以在很短的周期内完成一次测量,因而具有较高的响应速度。
3 实验系统的设计与组建
实验系统硬件结构如图3 所示,它由多谐振荡器和电平转换单元组成的信号采集模块、槽型光耦和步进电机及其驱动控制芯片组成的运动控制模块、主控模块和上位机显示模块组成。
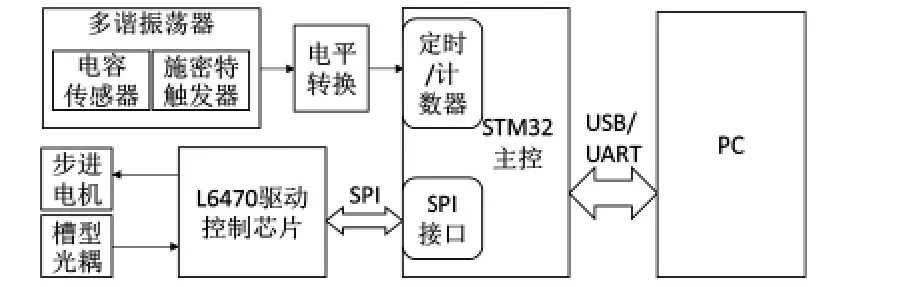
图3 硬件结构框图Fig 3 Hardware structure block diagram
加样针结构的电容传感器和CMOS 型施密特触发器CD40106 组成多谐振荡器,电阻分压实现多谐振荡器输出信号至主控芯片输入信号之间的电平转换。主控单元采用STM32 系列微控制器,利用其定时器的PWM 输入模式进行脉冲周期测量。每个测量周期内对脉冲上升沿进行计数,就可以测定其脉冲周期。L6470 步进电机驱动控制芯片通过SPI 接口与主控芯片通信,接收调速、定位等指令进行运动控制,并能实时返回电机位置、运行状态等信息[6]。STM32 主控与上位机采用USB 转串口通信,上位机使用LabVIEW 软件进行程序设计,实时显示实验结果。
为检测本文液位检测方法的灵敏度和精度,组建了全自动凝血分析仪加样针结构的实验系统,如图4 所示。
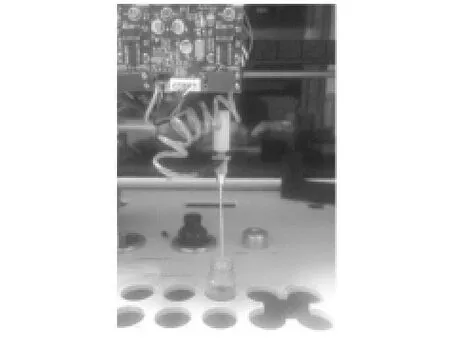
图4 实验系统实物图Fig 4 Physical map of experimental system
实验系统中步进电机驱动采用128 细分,测量其运行38 400微步加样针所经过的距离为42.583 mm,由此计算理论定位分辨率为1.1 μm/微步。
4 实验结果与数据分析
加样针运动过程中,STM32 主控芯片利用定时器检测各微步位置测得的信号脉冲数,发送至上位机进行显示和存储。对同一液面高度进行重复测量,为便于观察,任意选取10 次测量结果绘于图5,其中一次测量过程液面附近10 个微步位置的脉冲数测量值列于表1,各次实验检测到液面处对应的加样针移动距离s2和液位高度h 测量值列于表2。
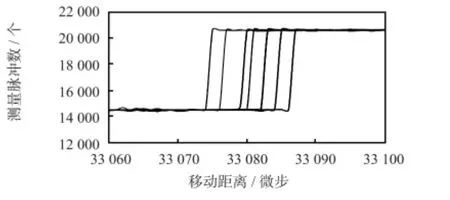
图5 重复测量实验结果Fig 5 Repeat measurement experimental results

表1 单次测量数据Tab 1 Single measurement data
表1 数据可以看出,33 084 微步处测量脉冲数发生跃变,2 微步之间脉冲周期的相对变化率为42.8%。如此显著的变化率表明:本文液面探测方法具有很高的灵敏度,环境因素变化不会对检测结果造成严重影响。据此设定脉冲周期的检测阈值能够得到液面的位置,本文此测量33 084微步处对应的探针下降距离s2为36 688 μm,液位高度h 为18 755 μm。
表2 求得液位高度h 均值为18 757.4 μm,标准差为4.1 μm。可见使用这种测量方法进行液位测量准确度很高,具有很小的检测误差,能够满足加样过程液位检测的精度要求。

表2 重复测量数据Tab 2 Repeated measurement data
5 结束语
将C/T 转换法用于加样针结构液位传感器的电容检测,能够对液面接触瞬间的电容变化进行准确测定,再结合步进电机运动控制实现了高灵敏度和高精度的液位检测。实验证明:这种检测方法具有组成结构简单、灵敏度高、重复性好、响应速度快等优点,可广泛适用于全自动临床分析仪器中对各种具有导电性能的液体进行液位检测。
[1] 朱险峰,张 阔,曾思思,等.全自动临床检验仪器中液面探测技术的进展[J].生物医学工程学杂志,2010(4):949-952.
[2] Suominen I,Koivisto S.Increasing precision when pipetting protein samples:Assessing reliability of the reverse pipetting technique[J].American Laboratory,2011,43:50-52.
[3] 祝连庆,张文昌,董明利,等.一种提高全自动酶免分析仪微量移液精度的方法[J].仪器仪表学报,2013(5):1008-1014.
[4] 曾柏杞,欧阳红林,苏深广,等.基于自适应算法的液面检测系统[J].传感器与微系统,2012,31(8):94-96.
[5] 刘松龄,何 翔.用matlab 语言建立液位电容传感器特性的数学模型[J].仪表技术与传感器,2001(6):7-8,22.
[6] 石星星,吴洪涛.基于专用控制芯片的步进电机运动控制系统设计[J].电子设计工程,2012(9):130-133.
