Li DAR技术在钱塘江海塘工程安全监测上的应用研究
2015-03-29陈梦雪刘洪庆许世城
陈梦雪,刘洪庆,许世城
(1.浙江省水利河口研究院,浙江 杭州310020;2.浙江省水利防灾重点实验室,浙江 杭州310020)
Li DAR(Light Detection And Ranging)技术将全球定位技术、惯性导航技术和激光测距技术有效集成[1],是21世纪的一项测绘技术新突破。它采用非接触式激光测量方式,可以快速获取地物的三维信息,生成地物的三维点云数据,充分体现地物的特征信息,相比传统的测量方式,具有效率高,数据量丰富、主动性、全天候等优势[2]。
海塘是人工修建的挡潮堤坝,是中国东南沿海地带的重要屏障,截至目前,浙江省已建成千里标准海塘,钱塘江标准海塘位于钱塘江河口南北两岸,发挥着防潮挡潮、抵御强台风的作用,保护着周边地区亿万人民的生命和财产安全。采用传统的测量方法对千里海塘进行安全监测耗时耗力,因此,如何快速获取海塘工程现状信息,了解海塘安全状况具有重大的意义。随着水利行业信息化技术的发展,对新技术的需求越来越大,Li DAR技术作为一种快速测量手段,随之数据精度的提高和使用成本的降低,逐渐受到广泛关注。本文将探索Li DAR技术在钱塘江海塘工程安全监测上的应用方法。
1 Li DAR技术概述
Li DAR技术是以距离测量为主,强度测量为辅,它通过位置、距离、角度等观测数据,快速获取地面三维点坐标(X,Y,Z,…),具有控制测量依赖性少、受天气影响小、自动化程度高、成图周期短等特点[3],可直接生成点云图像和强度图像,实现地表信息提取和三维场景重建 其独特的工作方式和数据处理方法已成为获取空间数据的一种重要技术手段。根据载体平台的不同,主要分为机载、车载、地面激光扫描技术3种[4],不同的Li DAR系统平台也适用于不同的应用范围。
机载Li DAR由于测量时距离较远,相比于车载和地面Li DAR,获取到的点云密度较为稀疏,但一次采集的数据覆盖范围较大;而车载和地面Li-DAR,由于近距离测量,获取到的点云数据密度更大,但由于激光雷达射程局限及地面遮挡物原因,一次采集获取的数据覆盖范围较小。
本文将通过机载和车载两种Li DAR系统平台,分别获取钱塘江海塘的三维点云数据,探索点云数据处理方法,并将处理后的数据应用于钱塘江海塘工程安全监测上。
2 三维点云数据采集
2.1 Li DAR数据采集与处理流程
三维点云数据基本采集与处理流程包括:数据采集平台的确定,点云数据的获取,数据预处理,数据处理,数据分析与应用,如图1所示。

图1 点云数据处理流程
2.2 机载Li DAR样区数据
在研究中获取到的机载实验区的数据是钱塘江北岸海塘,靠近嘉兴海宁市的一段长2 k m、宽2 k m的标准海塘范围数据,共获取到该段点云1 029 945个点,如图2所示。

图2 机载三维点云数据
2.3 车载Li DAR样区数据
车载实验区数据是钱塘江南岸海塘,位于杭州萧山区一段长约2 k m,宽约0.25 k m左右的海塘范围数据,共获取到该段点云3 531 033个点,如图3所示。
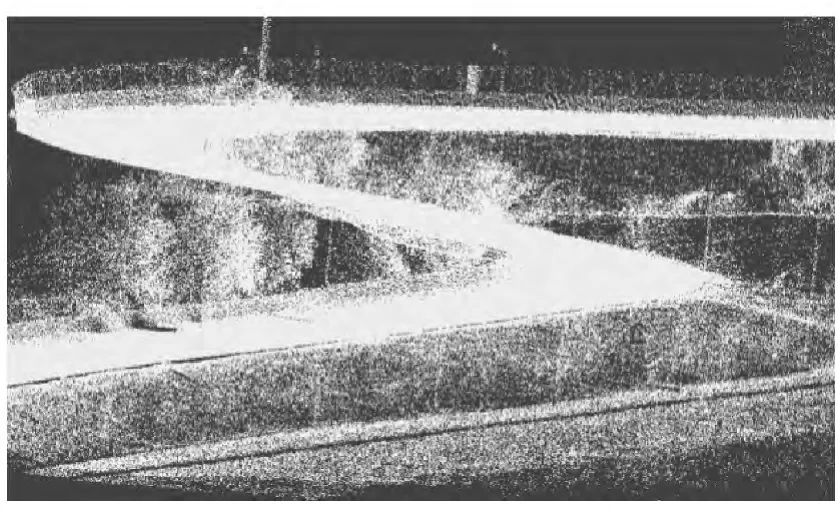
图3 车载三维点云数据
2.4 数据预处理
Li DAR系统采集到的数据主要包括原始激光点云数据、影像数据、地面GPS数据等。原始数据首先要进行数据预处理,包括:激光数据定位定向、数据检校、坐标转换、不同航带的数据拼接等过程[5]。
数据的预处理过程可以通过测量系统自带的软件来完成。针对机载点云数据,采用Terrasolid软件的Terra Match模块,进行不同航带的自动匹配、数据纠正与检校等预处理工作;车载点云数据则采用车载测量系统匹配的软件平台完成预处理工作。
3 基于钱塘江海塘的点云处理与分析
3.1 数据处理
1)噪声去除。在实际扫描作业过程中由于受环境、人为等因素的影响,获取的点云数据不可避免的包含噪声 为了降低或消除噪声对建模质量的影响,必须对数据进行去噪处理[6]。
2)数据抽稀。由于获取到的点云数据量过大,在数据处理时,数据处理速度较慢,为提高工作效率,可在不影响地物特征的情况下,根据一定的模型抽稀数据,以提高数据处理速度。
Real Wor ks软件提供了不同的抽稀模型,包括随机取样、空间取样、基于地形的取样等方法,在实验时多种方法结合使用,以保留研究地物的特征信息。
3)数据分类。机载Li DAR航飞获取的原始激光数据在经过数据预处理之后生成海量的激光点云数据,这些数据包括有地面点、植被点、建筑物点、水域点、其他地物点等[7]。采用Terrsolid软件的TerraScan模块,在设置好参数后,可以进行不同地物类型的自动分类 如地面点放在ground层 植被点放在vegetation层,建筑物点放在building层。在自动分类获得地面点之后,可能还存在不符合实际情况的地面点,因此还需要进行一定的手动分类,使生成的DEM更趋于平滑[8]。
而对于车载数据,本次处理过程中,主要利用Real Wor ks软件来完成。通过软件的OfficeSur vey模块分割、取样等功能,提取海塘工程点云数据,完成三维点的分类过程。
3.2 三维模型的建立
3.2.1 机载点云三维模型
利用Terrasolid软件的Terramodel模块,可以直接根据分类后的地面点实时生成该地块的DSM和DEM,如图4所示,可以明显看出海塘工程相较其它地物高程要高,符合实际情况。
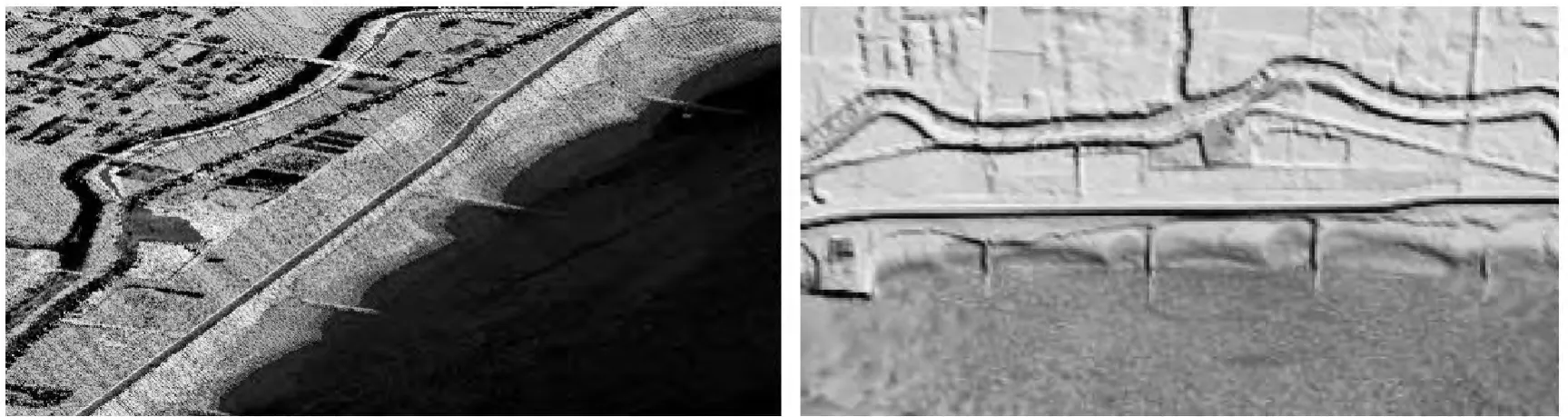
图4 机载点云三维模型(DSM、DEM)
3.2.2 车载点云三维模型
Real Works软件可以通过建模构建三角格网模型。图5的三角格网模型可以明显看出海塘工程的防洪墙与堤顶之间存在高程差,测量防洪墙与堤顶之间的距离约为1.5 m,与实际情况相符。该软件不能直接通过点云直接生成DEM,为此,在数据处理时,先将分类处理后的海塘点云抽稀处理,然后转为矢量点数据,在Arc GIS中完成DEM的生成。
在Arc GIS中生成的DEM如图5所示。
3.3 数据应用分析
3.3.1 剖面分析
根据生成的DEM数据,利用GIS平台完成海塘工程的剖面分析,能够充分了解海塘工程的剖面信息,包括防洪墙的高程信息,周边地物高程信息等。在图6所示的剖面图中,防洪墙高程为7.8 m,堤顶高程为6 m。

图5 车载点云三维模型(三角格网模型、DEM)

图6 海塘工程剖面图
3.3.2 沉降分析
对比两期车载Li DAR平台获取到的海塘工程点云数据,分别生成同一地区的两期DEM,在ARCGIS中可叠加分析不同时期的DEM(见图7),可对海塘工程的沉降情况进行监测。
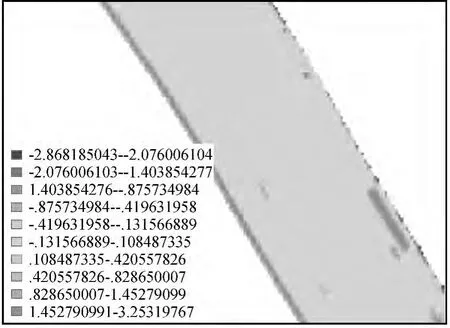
图7 DEM沉降监测
由两次DEM对比分析可知,海塘工程堤顶两次叠加,高程相差大部分在3 c m以内,在车载系统的误差范围内,可判断海塘工程沉降不明显。
4 结束语
海塘工程是大型的水利工程设施,它的安全与否直接影响着周边人民群众的生产生活,随着浙东千里标准海塘工程的建立完成,对海塘工程的实时安全监测任务亟待解决。本文通过探索Li DAR在海塘工程安全监测上的应用研究,提出通过激光雷达获取研究区海塘工程的三维点云数据,运用不同软件对三维点云数据处理与分析,对研究区海塘工程的沉降变化、剖面情况等作出分析,在一定程度上探索出了一种评价工程安全与否的新方法。
下一步可在本次研究的基础上,运用三维建模软件,建立海塘工程的实景三维模型,完成海塘工程三维场景重建。
[1] 王金鑫.机载Li DAR系统及其在水利中的应用[J].测绘与空间地理信息,2012,35(2):4-7.
[2] 韦春桃.3维激光扫描技术在墓葬保护中的应用[J].测绘与空间地理信息,2012,35(10):4-6.
[3] 王方建.大型建筑物数字化及三维建模关键技术分析[J].遥感技术与应用,2014,29(1):144-150.
[4] 谭敏,洪金益.基于Terrasolid软件的车载激光点云数据处理初探[J].测绘与空间地理信息,2011,34(5):195-198.
[5] 黄颖.大规模Li DAR数据的建模方法与应用研究[D].成都:西南交通大学,2010.
[6] 赵小平,刘文龙,高绍伟.基于三维激光扫描技术的校园可视化[J].测绘通报,2011(8):45-47,50.
[7] 梁东业.Li DAR技术及其在水利中的应用研究[D].武汉:长江科学院,2010.
[8] 辛麒.基于机载激光雷达数据构建DEM的精度分析[D].西安:长安大学,2009.
