多波束测深数据残余误差精细处理
2015-03-29冯湘子
刘 宾,冯湘子
(1.中国海洋石油公司,广州 深圳518000;2.中海油田服务股份有限公司,天津 塘沽300451)
多波束测深系统在现场作业时,如果参数有误,或者安装不够精密,会造成较大误差,而且大多误差无法通过后期处理完全修正。
现有的商业软件能对大部分的误差分析和校正,包括时延、横摇、纵摇、艏摇等。对于运动传感器(MRU)安装偏差造成的与横摇纵摇呈线性相关的偏差,阳凡林等曾提出过解决方法,但是搭载便携式多波束的探杆抖动造成的无规律随机误差尚未有解决方案。为此,本文提出解决此类问题的方案,并编写了多波束数据提取和分析软件。
1 多波束误差的产生
1.1 安装偏移
指在多波束测深系统安装过程中产生的偏差,包括在平面上与船艏向的偏移Yaw、纵向上沿前后方向的偏移Pitch和沿左右方向的偏移Roll。
使用常规勘察船进行多波束测深作业时,一般将多波束换能器固定于船体底部。外业船侧搭载便携式多波束系统时,由于每次作业前后都要进行收放,且探杆稳定性差,出现的问题较多,可能每次放下设备后的姿态都有差异。按规范要求应每次收放都进行一次校正,如果校正不够精确,则会造成安装偏移误差。
1.2 运动传感器(MRU)偏移
常规勘察船的运动传感器和多波束探头都是固定的,很少存在此类问题。而在外业船作业过程中,运动传感器一般在出港前进行安装,如果安装有误或者参数设置错误(空间坐标偏差、安装角度偏差、与船艏向偏差等)则会造成偏移误差。
1.3 抖动误差
常规勘察船的多波束换能器安装在船底,作业时姿态比较稳定。外业船搭载便携式多波束测深系统时,一般用钢制探杆将多波束放入水中,探杆长数米,在航行过程中在水流的阻力作用影响下,由于连接处不够紧密或者探杆的弹性形变,产生不规律的抖动。
2 实例分析
作业区域为我国南海,水深约90~100 m,作业方式为外业船搭载的便携式EM302多波束测深系统,在沉船南北侧同向做了两条由西向东的测线。初步处理后的资料较差,如图1所示,且测量误差较大。
1图1中的纵切剖面显示存在安装偏移 由横摇误差造成;
2)两次测量测得的沉船位置相差十几米,表明艏摇有误差;
3)沿航迹方向上大的起伏与横摇线性相关,说明运动传感器与船艏向存在夹角;
4)大的起伏上还存在细小的错动,说明探杆存在抖动。
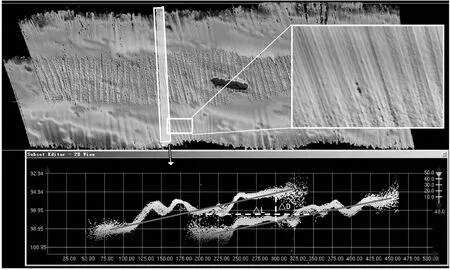
图1 多波束原始测深
2.1 安装偏移修正
1)横摇修正。以图1的纵向剖面图计算需要修正的横摇角度:

式中:ΔD为同一坐标的深度差,ΔL为两条测线间距。
2)艏摇校正。将两次测量中发现的同一特殊地貌位置进行标定,计算艏摇:

式中:ΔL为两条测线间距,d为同一地貌特征的平面距离。
2.2 运动传感器(MRU)位置偏差校正
水深数据与运动传感器数据(横摇Roll、纵摇Pitch、起伏Heave)存在线性关系,说明运动传感器存在偏差。设理论MRU与船艏向夹角α,根据α重新计算水深值并观察三维图或左右两侧水深剖面,调节α使水深与横摇和纵摇的线性关系消失即可。
2.3 抖动误差校正
本例中所使用的便携式多波束测深仪使用钢制探杆放入水中,前后由钢缆固定,因此前后的抖动几乎可忽略不计,仅在左右方向上的抖动较为明显。观察测线两侧70~110 m处地形较为平坦见图2,以10 m为间隔取8组水深平均值。计算8组数据相对于理论海底的深度偏差,计算理论抖动角:

式中:θi为第i个脉冲的理论抖动角;Dij为第i个脉冲的第j个数据点的深度与理论海底的深度差;Lij为第i个脉冲的第j个数据点的横坐标。
若一个脉冲内各抖动角基本相符(通过计算均方差判断),则说明所测海底与平均海底之间存在此抖动角。以此抖动角将此次脉冲的各个水深点的水深D和横坐标L进行修正,见图3。
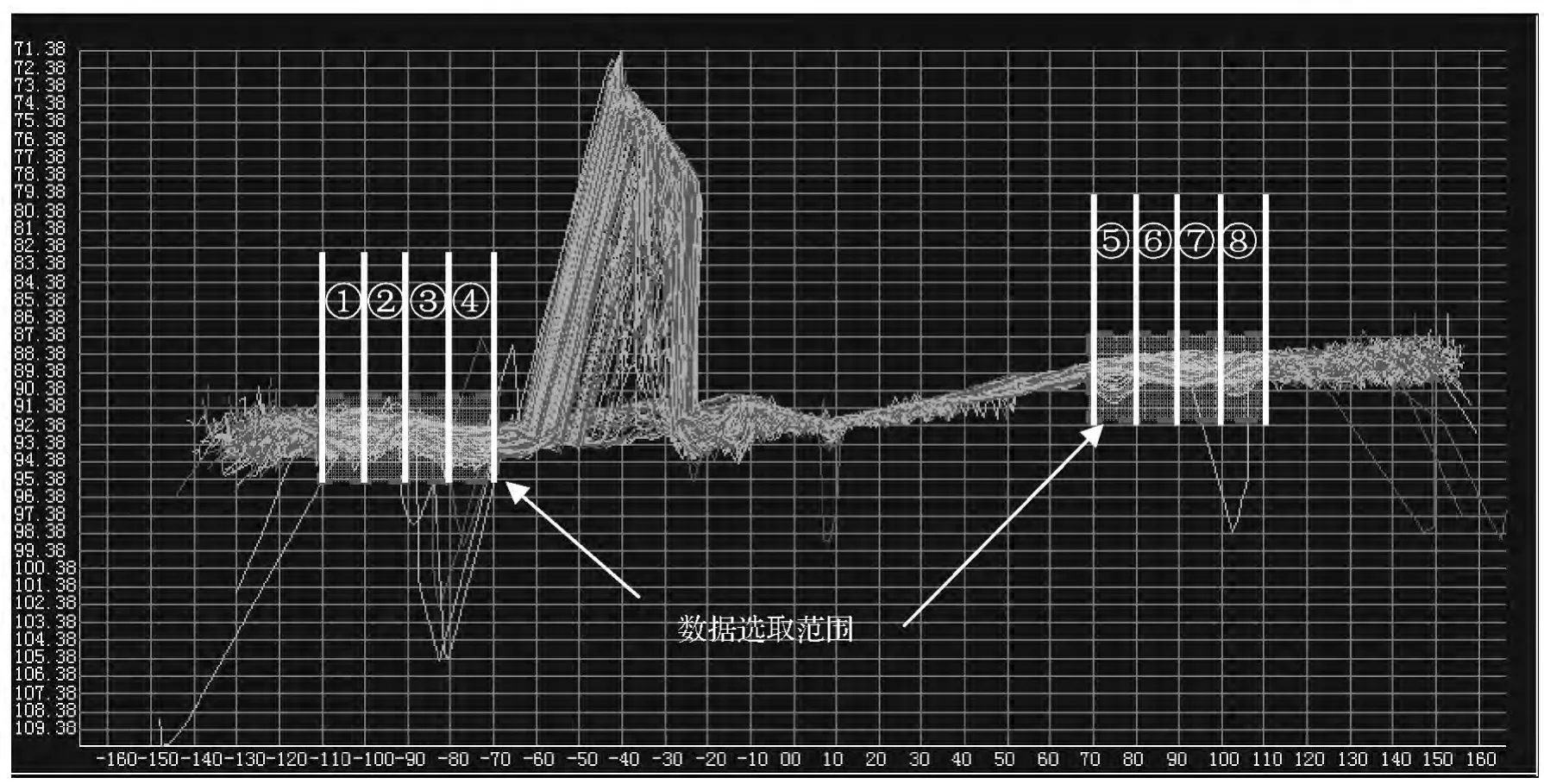
图2 数据选取(后视图)
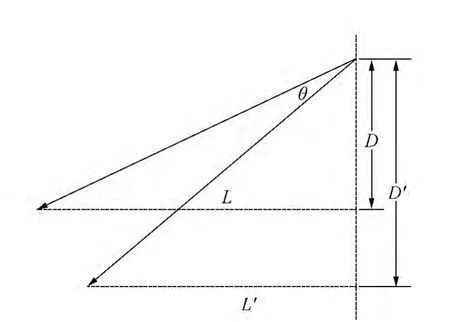
图3 抖动误差修正示意图


式中:D,L为原深度和垂直于航迹方向上的距离;D′,L′为修正后的深度和垂直于航迹方向上的距离;θ为理论抖动角。
整体校正后多波束数据质量有了很大地提高见图4,其中整个测线均做了安装偏移校正,可以发现校正后的两条测线的差异已改正。此外,对黑色虚线内数据做了MRU校正和抖动误差校正,可见其起伏和抖动已得到较大改善,而虚线外仍然存在明显的起伏。

图4 修正前(左)后(右)三维图对比
3 结 论
1)在使用多波束测深系统进行作业时,现场质控非常重要。若在后期处理发现所测数据存在非常规误差,只能在一定程度上减小误差,无法精确修正。
2)使用目前的商业软件进行多波束处理虽然操作简单,但是无法接触数据储存结构,出现新问题时无从下手。本文开发的多波束数据提取、分析和修改辅助软件,将原有的水深误差减小至合理范围内。
3)在所有的误差中,安装偏移影响最大、最常见、最容易修正。在要求不高的情况下进行安装偏移的校正,即可满足基本要求。
[1] KONGSBERG E M.Series multibeam echo sounder EM datagram for mats[S].2012,36-105.
[2] 王煜,赵英俊,阳凡林,等.EM300X系列多波束ALL数据格 式 解 析[J].山 东 科 技 大 学 学 报,2009(5):16-22.
[3] 宋玲玲.多波束测量数据预处理研究[D].南京:航空航天大学,2007.
[4] 沈彤茜.多波束系统交互式数据处理软件设计与实现[D].哈尔滨:哈尔滨工程大学,2010.
[5] 阳凡林,李家彪,吴自银,等.浅水多波束勘测数据精细处理方法[J].测绘学报,2008,37(4):444-450.
[6] 阳凡林,卢秀山,李家彪,等.多波束勘测运动传感器偏移的 改 正 方 法[J].武 汉 大 学 学 报,2010,35(7):819-820.
[7] 吴自银,金翔龙,郑玉龙,等.多波束测深边缘波束误差的综合校正[J].海洋学报,2005,27(4):88-94.
[8] 黄承义,肖春桥,田丰,等.基于EM系列多波束水深测量的声速剖面校正方法及技巧[J].测绘通报,2012(增刊):698-699.
[9] 李海森,陈丹,魏玉阔,等.多波束海底地形等深线快速生成新算法[J].哈尔滨工程大学学报,2012,33(5):1-6.
[10]王建忠,王玉龙.多波束与RTK三维水深测量技术的联合应用[J].测绘工程,2014,23(4):65-68.
