大推程航天电连接器电磁分离机构的研究
2015-03-28申允德
李 勇 张 策 申允德
(1.温州大学机电工程学院 温州 325035 2.浙江大学流体动力与机电系统国家重点实验室 杭州 310027 3.宁波华液机器制造有限公司 宁波 315131)
大推程航天电连接器电磁分离机构的研究
李 勇1,2张 策3申允德1
(1.温州大学机电工程学院 温州 325035 2.浙江大学流体动力与机电系统国家重点实验室 杭州 310027 3.宁波华液机器制造有限公司 宁波 315131)
提出一种基于整体式导磁套、梯形衔铁等结构的大推程电磁分离机构,其原理通过上述特征形成径向、环形侧向与轴向并存的磁通分布实现大行程范围内的水平推力特性。通过建立数学模型,仿真对比分析该电磁分离机构在不同行程下的磁通分布,探讨行程-力特性及其产生机理,并获得导磁套盆形凹槽角度、薄壁厚度和衔铁端面形状等结构参数对其特性的作用规律。实验结果与仿真结果基本吻合,表明该电磁分离机构原型样机0.8A电流激励时15mm推程内的额定推力均在63N以上,满足大推程航天电连接器直接驱动的要求。
电连接器 电磁分离机构 整体式导磁套 梯形衔铁 推程
0 引言
在航天工程的各类电子系统中,电连接器在器件与器件、组件与组件、系统与系统之间进行电气连接和信号传递,直接关系到整个系统的安全可靠运行[1]。电连接器由插头和插座组成,在航天工程中的某些重要应用场合采用锁套-钢球-推杆式连接机构,并可作瞬间电磁分离(正常)和机械分离(非正常)。以卫星分离应用场合为例,采用机械分离时用一根钢丝绳将电分离连接器的推杆与卫星连接在一起,借用卫星的分离惯性力强制执行脱拔机构,实现电连接器插头和插座的瞬间强制机械分离。该分离方式无需额外力,结构紧凑,输出力大,但机械分离所产生的机械力将会干扰卫星的分离姿态,影响卫星的分离安全。而采用电磁分离时,分离解锁装置解锁前就预先通过电磁分离机构的推程力使插头和插座实现分离,这种情况将不会对卫星分离产生干扰。因此,集成电磁分离机构的电连接器技术研究对于航天工程的安全运行具有重要意义。
目前国内研究机构在小规格的电连接器上已实现了紧凑式直流电磁分离机构的集成[2],与纯机械分离方式相比较,提高了分离动作的安全性,在部分战略战术武器系统、航天运载系统的级间电气线路分离方式上得到应用,如贵州航天电器股份有限公司的小型圆形电连接器[3]、杭州航天电子技术有限公司八二五厂的水下分离电连接器[4]、中国运载火箭技术研究院的双端分离电连接器[5]等产品。然而随着电子系统的控制复杂程度和可靠性等要求日益提高,电连接器插针的芯数和直径都有所增大,对于电磁分离所需的推程力性能要求明显提高,因而电磁分离方式在某些需要分离脱落的特殊应用领域仍受到限制,如一些大规格的专用电连接器仅采用传统的机械分离方式,其主要原因在于高性能电磁分离机构的研究缺乏基础理论技术和自主知识产权的支撑,并长期受到国外欧美等国家的严密封锁。
如何提高电磁机构的推程力性能是航天电连接器研究亟待解决的一个技术难点,也是国内外电磁机构技术发展的一个热点[6-9]。R.C.Okonkwo等[10]和C.M.M.van Lierop等[11]均提出一种磁悬浮直线电机来替代传统的伺服或步进旋转电机,行程可达200 mm,有效满足了长行程直线驱动的要求,但结构复杂且推程力仅为10 N。寇宝泉等[12]提出一种新型Halbach次级结构永磁同步直线电机,满足超精密二维定位装置直接驱动的要求。刘成颖等[13]对永磁直流同步电机电磁推力特性进行了研究,获得样机负载变化与推力波动之间的关系,满足精密和超精密加工领域的应用。庄劲武等[14]提出一种基于电磁斥力原理的高速机械触头机构,满足断路器机构快速动作、高速运动特性的要求。丁 凡等[15]提出一种4 mm行程的耐高压高速开关电磁铁,满足耐高压电磁开关阀的驱动要求。A.di Gaeta等[16]提出一种发动机用电磁可变气门阀驱动器,利用双电磁铁和平衡弹簧的控制实现7 mm的位置调节,可灵活改变气门正时,提高燃油经济性和动力性。S.Gibson等[17]提出一种8 mm行程的线性驱动器,其行程-力特性研究表明该驱动器具有60 N的推程力特性,满足燃料喷射和电磁阀驱动控制等场合的应用。
鉴于航天工程中电连接器的直接驱动和结构紧凑性要求,基于磁路基本原理,采用整体式导磁套、梯形衔铁等结构设计,形成径向、环形侧向与轴向并存的磁通分布,提出一种用于航天电连接器的大推程电磁分离机构,并基于有限元方法建立数学模型,通过仿真分析关键磁路结构参数的作用规律,实现大推程电磁分离机构的参数优化设计,结合实验研究对其行程-力特性进行分析。
1 结构和原理
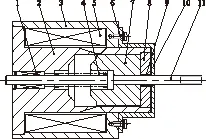
1.直线轴承 2.导磁套 3.壳体 4.弹簧 5.线圈绕组 6.螺钉7.衔铁 8.衬套支撑座 9.衬套 10.端盖 11.推杆图1 大推程电磁分离机构简图Fig.1 Schematic of large extending stroke electromagnetic separable mechanism
一种大推程电磁分离机构如图1所示。线圈绕组为螺线管式,装在壳体和导磁套之间形成的环形空间内。位于壳体内的导磁套为整体式结构,与常用分段结构中采用焊铜实现连接和隔磁的方式[15]不同:导磁套表层设有环状的盆形凹槽,利用凹槽底部薄壁的局部材料磁饱和实现左右两侧磁路的隔断,结构工艺性好。导磁套内腔设有与导磁套滑动相连的梯形衔铁,衔铁内腔通过弹簧与推杆紧密相连,推杆两端分别通过装在导磁套内的直线轴承和衬套及其支撑座支撑并实现滑动相连。端盖通过螺钉固定在壳体一侧,限定衬套及其支撑座的位置。其中导磁套、壳体、衔铁由软磁材料制成,推杆由非磁性材料制成。当线圈绕组通电流时,衔铁与导磁套之间形成特定的磁通分布,衔铁上所产生的电磁力由推杆输出,克服弹簧力并对外负载做功,电连接器自由端插头和固定端插座在推程力作用下实现分离;当线圈绕组无电流时,推杆和衔铁在弹簧回程力作用下实现复位。
2 仿真研究
2.1 数学模型
描述静态磁场特性,引入矢量磁位以方便求解,方程为

式中,μ为磁导率;A为矢量磁位;J为矢量电流密度。

(1)
涉及铁磁材料磁饱和效应,磁导率μ为磁感应强度B的函数,即

(2)
边界条件是求解电磁场问题的关键。边界条件可分为狄利克雷条件和齐次诺伊曼条件,可分别表述为
Aφ=0, ∂Aφ/∂n=0
(3)
式(1)~式(3)描述了电磁分离机构的静态非线性磁场特性,是有限元仿真模型建立的基础。
2.2 气隙磁通分布
基于上述数学模型,电磁分离机构简化为轴对称结构,取其一半的结构,在有限元软件中建立了仿真模型。电工纯铁饱和磁性材料的直流磁化曲线如图2所示。为提高分析的准确度,对整体式导磁套及梯形衔铁局部进行了网格加密,如图3a所示。
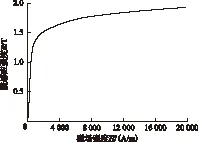
图2 电工纯铁饱和磁性材料的直流磁化曲线Fig.2 DC magnetization curve of pure iron material
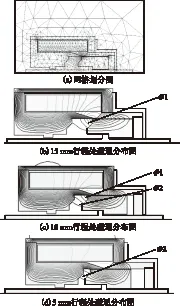
图3 有限元模型和磁通分布Fig.3 Finite element model and magnetic flux pattern
通过有限元仿真分析,可获得衔铁处于不同行程处的磁通分布情况,以行程15、10、5mm为例,图3b~图3d给出了这3个特定值时的磁通分布。可见,线圈绕组通电流时,产生的磁通在导磁套、衔铁和壳体等导磁材料中形成闭合回路,其中导磁套盆形凹槽的设计使得该磁通在其底部薄壁处于饱和隔断,引导磁通经过附近工作气隙后再由衔铁返回导磁套另一侧,从而在衔铁表面产生较大的电磁力,并由推杆输出。衔铁与导磁套之间大致可分为径向、环形侧向和轴向3部分磁通,根据电磁力产生的机理可知轴向电磁力的产生主要取决于环形侧向和轴向磁通。对比图3b、图3c、图3d的磁通分布,可知行程对衔铁轴向电磁力的产生途径影响明显:行程较大处(图3b)主要由衔铁端面与导磁套盆形凹槽左段内侧面之间的环形侧向磁通所产生;行程较小处(图3d)主要由衔铁端面与正对的导磁套内端面之间的轴向磁通所产生;而行程中段处(图3c)由侧向磁通和轴向磁通两部分共同作用产生。
2.3 行程-力特性
通过对电磁场量的积分运算,仿真计算可得电磁分离机构的行程-力特性,图4为不同激励电流(0.2、0.4、0.6及0.8A)时的行程-力曲线。在2~14mm行程范围内,行程-力曲线可近似为水平段,这是由于轴向磁通与环形侧向磁通相互作用的结果,大行程时环形侧向磁通占主导,小行程时轴向磁通占主导,从而在大行程范围内获得较为平坦的电磁推力。结果表明,提出的整体式导磁套、梯形衔铁等结构设计能够实现大行程范围内的水平推力特性,解决传统机构大推程起动力不足的缺点,更好地满足大推程航天电连接器的驱动要求。
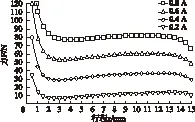
图4 不同激励电流时的行程-力曲线Fig.4 Simulated results of force-stroke curves under various currents
2.4 参数优化分析
由磁通分布图可知,衔铁和导磁套附近的结构参数(图5)对行程-力特性的形成具有重要作用,为此有必要分析导磁套盆形凹槽角度α、薄壁厚度t和衔铁端面形状等结构参数对行程-力特性的作用规律。利用建立的数学模型,对上述结构参数进行仿真分析。结果表明:
1)导磁套盆形凹槽角度α是影响工作气隙径向、环形侧向和轴向磁通分布规律中的重要参数。图6给出了不同α时的行程-力曲线。当α增大时,大行程(8~15 mm)处电磁力增大而小行程(1~6 mm)处电磁力减小。原因在于α较大时,大行程处形成的环形侧向磁通较多,所产生的电磁力较大,而小行程处形成的轴向和环形侧向磁通较少,所产生的电磁力较小。以本规格样机0.8 A额定电流为例,当α取16.5°时,曲线较为平坦,在15 mm行程范围均具有较大的电磁力(均大于65 N)。

图5 衔铁和导磁套附近结构参数图Fig.5 Structural parameters near armature and flux sleeve

图6 不同凹槽角度时的行程-力曲线Fig.6 Stroke-force curves under various groove angle
2)导磁套薄壁厚度t是电磁分离机构的关键。一方面利用薄壁材料的饱和特性实现磁路隔断,另一方面利用薄壁实现导磁套左、右两部分的刚性连接,保证导磁套与其内衔铁的同轴度。图7给出了不同t时的行程-力曲线。当厚度较小时,行程范围内所产生的电磁力较大。原因在于t较小时的隔磁效果较好,引导大部分磁通从衔铁内部穿过,产生作用于衔铁上的电磁力。但当厚度较小时需要通过其他方式(如焊铜的方法)实现导磁套的刚性连接,工艺复杂度和成本均较高。为此,可采用一定厚度薄壁的整体式导磁套来平衡结构工艺和隔磁性能的要求(如本规格样机中t为0.5 mm)。
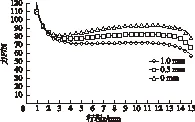
图7 不同薄壁厚度时的行程-力曲线Fig.7 Stroke-force curves under various thin-wall thickness
3)衔铁端面形状是电磁分离机构的设计要点。图8给出了锥面、梯形台面和平面3种不同衔铁端面形状时的行程-力曲线。与锥面衔铁相比,梯形台面和平面衔铁的设计更有利于提高电磁力,原因在于梯形台面和平面衔铁所形成的环形侧向磁通均较多,所产生的电磁力较大。而梯形台面衔铁与平面衔铁相比力特性基本相近,但在小行程处电磁力略大。因此采用梯形台面衔铁的结构设计更有利于形成大行程范围(本规格中为15 mm)内的水平推力特性。
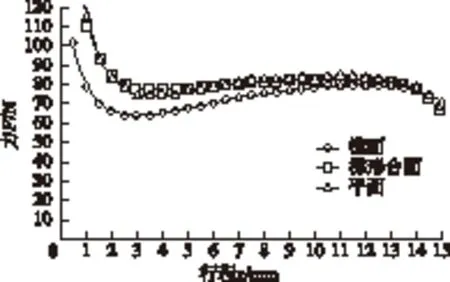
图8 不同端面形状时的行程-力曲线Fig.8 Stroke-force curves under various terminal shape
此外,基于数学模型,在一定的结构尺寸范围内,针对大行程范围内的水平推力特性要求,对衔铁直径、线圈等参数进行了仿真分析,获得优化参数,研制大推程电磁分离机构的原型样机(图9),关键设计参数见表1。

1.壳体 2.线圈绕组 3.端盖 4.导磁套5.衬套支撑座 6.衔铁 7.推杆图9 大推程电磁分离机构原型样机Fig.9 Prototype of large extending stroke electromagnetic separable mechanism
3 实验研究
基于搭建的测试系统[18],对该原型样机进行测试(图10),获得静态行程-力特性。电磁分离机构的行程-力特性如图11所示,①和③分别为0.8 A和0.4 A电流时沿与电磁吸力相反方向(以下称回程)进行测试的行程-力曲线,②和④分别为0.8 A和0.4 A电流时沿与电磁吸力相同方向(以下称推程)进行测试的行程-力曲线。

表1 大推程电磁分离机构的关键设计参数Tab.1 Key design parameters of large extending stroke electromagnetic separable mechanism

1.LabVIEW系统 2.测试平台 3.原型样机 4.直流电源图10 大推程电磁分离机构测试系统Fig.10 Test system of large extending stroke electromagnetic separable mechanism
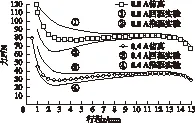
图11 实验曲线与仿真曲线对比Fig.11 Experimental vs.simulation curves
实验结果表明:该电磁分离机构行程-力特性存在滞环,滞环量随行程的减小而显著增大(如12 mm处行程的滞环量为5%,而8 mm处行程的滞环量增大至10%),原因在于衔铁移动过程存在不可避免的摩擦力及铁磁材料磁滞效应,尤其是行程减小时径向磁通作用下的不平衡径向电磁力增大,引起的衔铁摩擦力导致滞环量显著增大;曲线②与实际工作情况相符,表明该电磁分离机构0.8 A电流激励时15 mm推程内的额定推力均在63 N以上,且除推程末端(2 mm内)外,推力趋于水平,大行程处的初始力略大于小行程处的末端力,有利于提高大推程电磁分离机构的起动力和降低末端冲击力。
实验曲线与仿真曲线相比较,回程时电磁吸力与摩擦力相叠加输出推力,其值大于仿真值;推程时电磁吸力克服摩擦力之后输出推力,其值小于仿真值,可见仿真曲线介于推程和回程实验曲线之间,且仿真曲线与实验结果的名义曲线基本相近,因此仿真结果与实验结果基本吻合,证明仿真模型是可靠的。
为了获得推程位移响应特性,在28 V直流阶跃电压驱动下,通过激光位移传感器(Micro-Epsilon公司optoNCDT1700-50LL,采样率2.5 kHz,比例增益5 mm/V)测量该电磁分离机构的推杆位移,实验结果如图12所示。结果表明:该电磁分离机构空载时,15 mm内推程位移响应时间总共为70 ms,其中推程触动时间为46 ms,推程运动时间为24 ms。

图12 推程位移响应特性曲线Fig.12 Displacement response curve in extending stroke
4 结论
1)提出了基于整体式导磁套和梯形衔铁结构的大推程电磁分离机构,研究结果表明该原型样机0.8 A电流激励时15 mm推程内的额定推力均在63 N以上,可用于大推程航天电连接器的直接驱动,具有工程实用价值。
2)建立了该电磁分离机构的数学模型,通过有限元仿真对比分析了不同行程处的磁通分布,探讨了行程-力特性及其产生机理,仿真结果和实验结果基本吻合,证明仿真模型是正确的,通过仿真能够实现关键结构参数的有限元优化分析,为高性能航天电连接器电磁分离机构的性能优化提供技术手段和理论支撑。
3)该电磁分离机构行程-力特性存在较大滞环,滞环量随行程的减小而显著增大,理论设计时滞环误差对推程力特性的影响应加以考虑。
[1] 周怡琳,王鹏,葛世超,等.长期贮存航天电连接器尘土污染的研究[J].电工技术学报,2014,29(7):269-276. Zhou Yilin,Wang Peng,Ge Shichao,et al.Investigation on dust contamination of aerospace electrical connector after long-term storage[J].Transactions of China Electrotechnical Society,2014,29(7):269-276.
[2] 杨奋为.军用电连接器创新发展研讨[J].机电元件,2012,32(4):52-61. Yang Fenwei.Innovation development of electric connector for military use[J].Electromechanical Components,2012,32(4):52-61.
[3] 卢贵斌.小型圆形电磁分离电连接器:中国,200810068995.X[P].2008-11-14.
[4] 陈振宇,张利彬,王志廷,等.一种水下电磁分离电连接器:中国,CN201310721578.1[P].2013-12-24.
[5] 潘明健,李彬,崔军朋.一种单端控制双端分离的分离电连接器:中国,201110335888.0[P].2011-10-31.
[6] Afshar S,Khamesee M B,Khajepour A.Optimal configuration for electromagnets and coils in magnetic actuators[J].IEEE Transactions on Magnetics,2013,49(4):1372-1381.
[7] Wang J B,Atallah K,Wang W Y.Analysis of a magnetic screw for high force density linear electromagnetic actuators[J].IEEE Transactions on Magnetics,2012,47(10):4477-4480.
[8] Lee J,Dede E M,Banerjee D,et al.Magnetic force enhancement in a linear actuator by air-gap magnetic field distribution optimization and design[J].Finite Elements in Analysis and Design,2012,58:44-52.
[9] Li Yong,Shen Yunde,Cheng Taihong.High-thrust linear actuator based on double corner-pole airgaps for proportional relief valve[J].IEEE Magnetics Letters,2014,5:0800104.
[10]Okonkwo R C,Hanitsch R.Development and control of a prototype permanent-magnet DC linear motor[J].IET Electric Power Applications,2007,1(2):223-228.
[11]van Lierop C M M,Jansen J W,Damen A A H,et al.Model-based commutation of a long-stroke magnetically levitated linear actuator[J].IEEE Transactions on Industry Application,2009,45(6):1982-1989.
[12]张鲁,寇宝泉,赵斌超,等.新型Halbach次级结构永磁同步直线电机[J].电工技术学报,2013,28(7):39-45. Zhang Lu,Kou Baoquan,Zhao Binchao,et al.A novel synchronous permanent magnet linear motor with Halbach secondary structure[J].Transactions of China Electrotechnical Society,2013,28(7):39-45.
[13]刘成颖,王昊,张之敬,等.基于非线性电感分析的永磁直线同步电机电磁推力特性研究[J].中国电机工程学报,2011,31(30):69-76. Liu Chengying,Wang Hao,Zhang Zhijing,et al.Research on thrust characteristics in permanent magnet linear synchronous motor based on analysis of nonlinear inductance[J].Proceedings of the CSEE,2011,31(30):69-76.
[14]江壮贤,庄劲武,王晨,等.基于电磁斥力原理的高速触头机构仿真分析与设计[J].电工技术学报,2011,26(8):172-177. Jiang Zhuangxian,Zhuang Jinwu,Wang Chen,et al.Simulation analysis and design of a high speed contact mechanism based on electro-magnetic repulsion mechanism[J].Transactions of China Electrotechnical Society,2011,26(8):172-177.
[15]满军,丁凡,李勇,等.耐高压大行程高速开关电磁铁的动态特性[J].煤炭学报,2010,35(5):871-875. Man Jun,Ding Fan,Li Yong,et al.Dynamic characteristics of high-pressure long-stroke high-speed on-off solenoid[J].Journal of China Coal Society,2010,35(5):871-875.
[16]di Gaeta A,Montanaro U,Giglio V.Experimental validation of a hybrid analytical-FEM model of an electromagnetic engine valve actuator and its control application[J].IEEE-ASME Transactions on Mechatronics,2013,18(2):807-812.
[17]Gibson S,Jewell G W,Clark R E.Variable-airgap cylindrical linear variable reluctance actuators for high-force medium-stroke applications[J].IET Electric Power Applications,2009,3(4):352-362.
[18]王海龙,李勇,吕燚斌,等.基于LabVIEW 的电磁铁力特性测试系统[J].液压与气动,2012(4):34-36. Wang Hailong,Li Yong,Lv Yibin,et al.Force characteristics test system of solenoid based on LabVIEW software[J].Chinese Hydraulics & Pneumatics,2012(4):34-36.
The Research on the Electromagnetic Separable Mechanism for Aerospace Electric Connector with Large Extending Stroke
LiYong1,2ZhangCe3ShenYunde1
(1.College of Mechanical and Electrical Engineering Wenzhou University Wenzhou 325035 China 2.The State Key Laboratory of Fluid Power Transmission and Control Zhejiang University Hangzhou 310027 China 3.Ningbo Hoyea Machinery Manufacture Co.Ltd. Ningbo 315131 China)
Due to requirements of direct drive and compact structure for the electric connector in aerospace engineering,an electromagnetic separable mechanism with large extending stroke based on the integral flux sleeve and the trapezoidal armature was presented.The radial,annular lateral and axial fluxes are formed and coexisted in the above feature,resulting in the horizontal thrust force characteristic within large stroke.Magnetic flux patterns of the mechanism at various strokes were compared and analyzed based on the established mathematic model,and the stroke-force characteristics and its causes were discussed.The effect of the structural parameters,e.g. the groove angle and the thin-wall thickness of the sleeve,the terminal shape of the armature,on the characteristics was obtained.The experimental results are in accordance with the simulation ones.The prototype of the proposed electromagnetic separable mechanism can obtain the rated thrust force of over 63 N within the extending stroke of 15 mm with the exciting current of 0.8 A,which meets the requirement of the direct drive for large extending stroke aerospace electric connector.
Electric connector,electromagnetic separable mechanism,integral flux sleeve,trapezoidal armature,extending stroke
国家自然科学基金(51305305),浙江省自然科学基金(LQ13E050010)和流体动力与机电系统国家重点实验室开放基金(GZKF-201307)资助项目。
2014-11-24 改稿日期2014-12-29
TM574
李 勇 男,1982年生,博士,讲师,研究方向为电磁控制元件技术。(通信作者)
张 策 男,1981年生,硕士,工程师,研究方向为液压系统及元件设计。