MEMS陀螺在红外成像系统中的研究应用
2015-03-28黄剑侠
韩 颖,黄剑侠,高 原
MEMS陀螺在红外成像系统中的研究应用
韩 颖,黄剑侠,高 原
(中国空空导弹研究院 计量测试中心,河南 洛阳 471000)
简要介绍了红外成像导引系统中的稳像技术原理,说明陀螺仪在辅助设备电子稳像系统中的重要地位。目前,国内辅助设备电子稳像系统中常采用的光纤陀螺,文中对光纤陀螺的优缺点进行分析,并与新兴的MEMS陀螺在技术指标层面作对比。再设计试验方案,从试验的角度论证MEMS在实际应用中可以代替光纤陀螺,并且在性能、体积、价格上比光纤陀螺更有优势。
稳像技术;电子稳像;光纤陀螺;MEMS陀螺;卡尔曼滤波
0 引言
红外成像导引头是导弹的重要组成部分。导弹在快速飞行过程中受到的振动等外界因素会使视频信号不稳定,从而不能得到清晰的图像,为了消除这种不稳定,就要对视频信号进行稳像处理。因此,稳像技术作为精确制导武器的主要的技术力量,成为未来精确制导一个重要的研究方向。稳像技术的发展经历了从光学稳像,机械稳像到电子稳像的发展。光学稳像和机械稳像由于设备昂贵及其体积较大,已逐渐被电子稳像取代。
电子稳像是通过获取序列图像的运动矢量对图像进行运动估计,并通过数字图像处理进行补偿的一种技术。目前获取图像运动矢量的方法有2种:一是辅助设备稳像,二是基于图像处理自动稳像[1]。辅助设备稳像,一般指利用角速度传感器获得运动载体的旋转角速度,然后对这些角速度信号进行信息处理,达到对图像的稳定作用。辅助设备稳像不受图像质量和信息的影响,不需要大量复杂的求取运算,具有检测速度快,适用范围宽的优点。基于图像处理自动稳像则是采用纯数字图像处理的方法,利用当前帧图像与参考图像之间的运动矢量估计进行图像配准。纯数字图像处理的方法容易实现,基本不增加硬件,是一种理想的电子稳像系统。但是由于这种方法需要丰富的图像信息,而实际中的成像环境复杂,图像质量和信息会受到影响,导致其运算速度和运算精度往往不高[2-3]。
目前国内在弹载、轻载飞机等载体上主要应用的是辅助设备稳像[4],因此,陀螺仪的选用直接影响了稳像系统的质量。国内稳像系统中选用的辅助设备多为光纤陀螺。相对于传统的机械陀螺和激光陀螺,光纤陀螺无运动部件,仪器牢固稳定,耐冲击且对加速度不敏感,结构简单,价格低廉,启动时间短,寿命长,信号稳定可靠。光纤陀螺的技术难题在于不易获得干涉特性好的半导体光源和相应的集成光学器件,而且抗核辐射性能较差[5]。随着国内外未来武器成本更低、体积更小、可靠性更高的发展趋势,微机械(Micro Electron Mechanic Systems,MEMS)陀螺仪逐步开始受到人们的青睐。MEMS陀螺仪最大的优势就是体积小适合大批量生产(1mm2硅晶片上可制出上千个陀螺)、重量轻、成本低($10~$50左右)。另外MEMS陀螺仪还具有寿命长、可靠性高、灵敏度高、易于集成、功耗可忽略不计以及耐恶劣工作环境等优势。
自20世纪90年代初以来,MEMS陀螺仪已经在消费电子产品、汽车工业等领域崭露头角[6-8]。预计在未来,MEMS陀螺仪将取代光纤陀螺,在精确制导武器稳像系统中拥有广阔的前景。
1 陀螺仪原理及应用
1.1 MEMS陀螺仪原理
MEMS陀螺是一个基于科里奥利力(Coriolis)原理的微机械单元,它以物体本身作为参照物,利用震动质量块被基座带动旋转时的哥氏效应传感角速度的原理,来检测物体运动的角速度。MEMS陀螺的这种特性,使得它已经在阿帕奇直升机,S-92直升机,Stryker装甲车炮塔的稳定平台中得到了很好的应用。
为了研究MEMS陀螺是否可以代替现有的光纤陀螺仪来获取运动载体的运动矢量,本文选用AD公司ADXRS622型陀螺仪(如图1)来做具体的研究。这款MEMS陀螺仪虽然为轴偏航响应角速率陀螺仪,但是由于多轴的陀螺稳像系统通常采用多个单轴陀螺,对载体沿3个方向转动的角速率进行测量,经过坐标解算,对稳定平台进行实时补偿,保持轴线的指向稳定。因此,在本次设计中,选择单轴陀螺进行设计研究,为后续多轴稳定平台的设计奠定基础。

图1 ADXRS622型陀螺仪
1.2 ADXRS622型陀螺仪简介
ADXRS622是一款功能完备,成本低廉的轴偏航响应角速率陀螺仪,用于测量旋转轴与其轴平行的旋转物体的角速度,可以安装在与旋转轴垂直的任何平面位置上。该陀螺仪采用ADI公司的表面加工工艺制造,在7mm×7mm×3mm BGA芯片封装上单片集成了全部必需的电子器件。
从图2中可以看出,ADXRS622采用+0.5V电源供电,角速率信号通过低通滤波器,输出放大器,解调电路,最后输出与轴方向产生的角速率成正比的电压信号RATEOUT。当25℃,0°/s时,RATEOUT零点电压值为2.5V,其工作原理如图3。ADXRS622同时提供温度输出TEMP,供补偿技术使用。
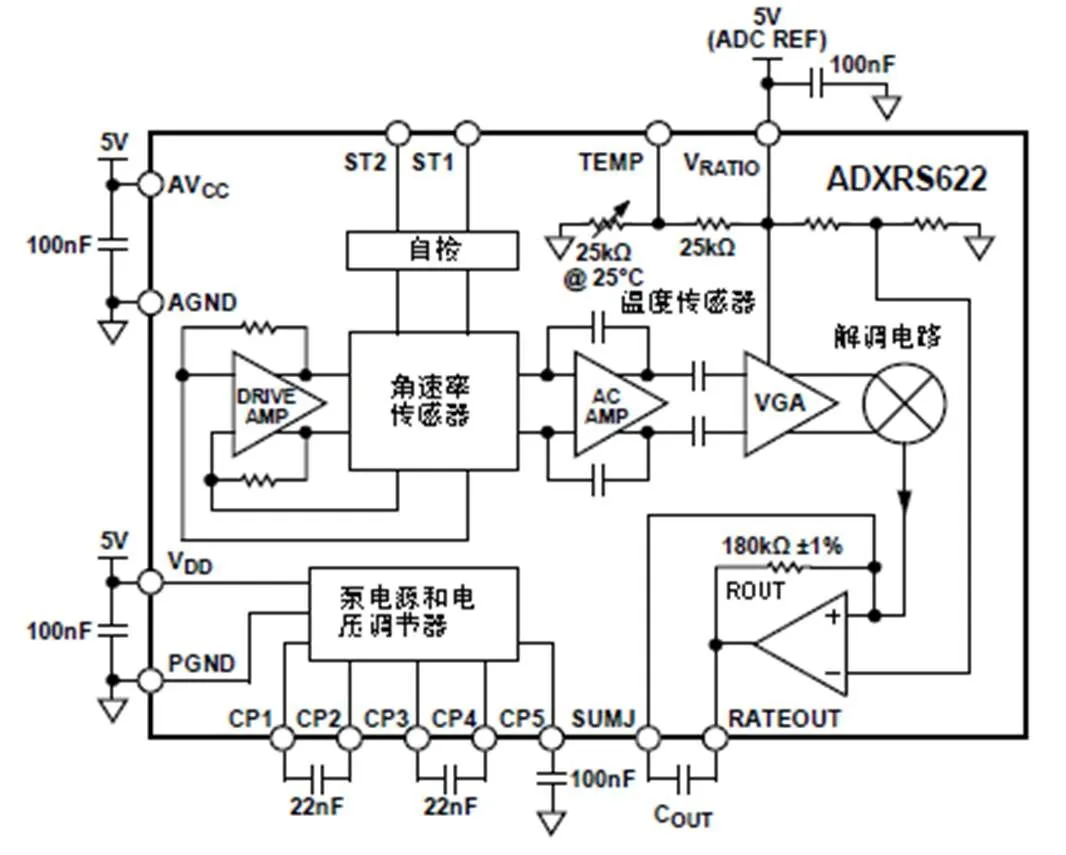
图2 ADXRS622功能模块
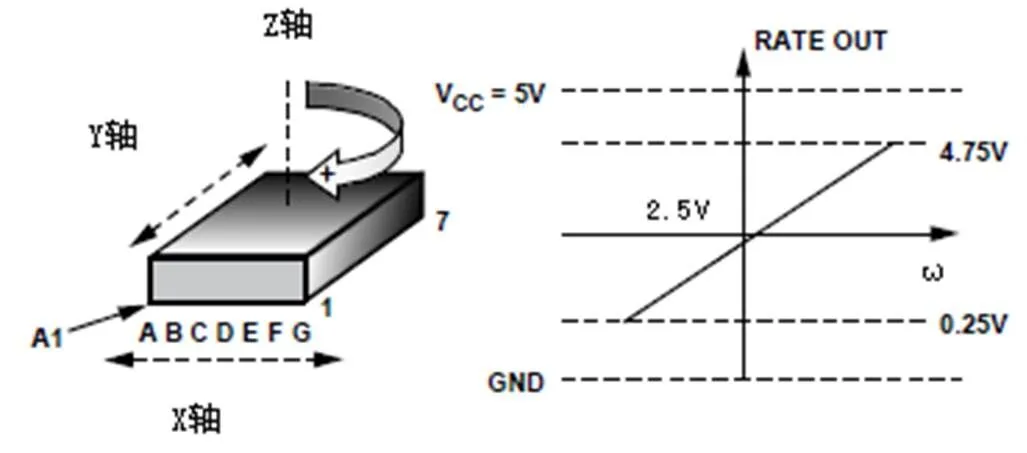
图3 ADXRS622工作原理
1.3 光纤陀螺仪选型
光纤陀螺采用的是Sagnac干涉原理,如图4,利用光纤绕成环型光路,并检测出反向传播的2路光束之间的相位差,从而计算出旋转的角速度。
1975年,美国率先在世界上提出了光纤陀螺的设想。至90年代中期,光纤陀螺开始走向使用,最初用于战术导弹及飞机航姿系统中,是目前应用最为成熟的陀螺仪。
俄罗斯FIZOPTIKA公司生产的VG091A光纤陀螺仪是目前世界上最新的,体积和重量最小的光纤陀螺仪,其体积为51.5mm×23.8mm,重量为30g,如图5。该陀螺仪可以直接用来测量物体的转动角速度,输出一个和角速度成正比的模拟电压信号,使用简单方便。本设计就选用VG091A光纤陀螺,完成与ADXRS622的对比试验。
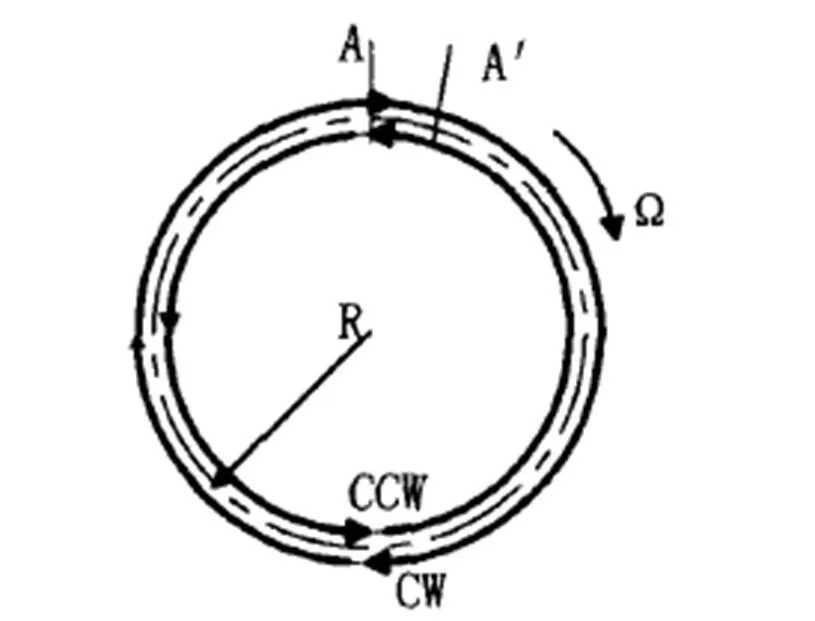
图4 Sagnac干涉原理
Fig.4 The principle of Sagnac interference

图5 VG091A型光纤陀螺仪
1.4 MEMS陀螺与光纤陀螺技术指标对比
在本文中选择VG091A型光纤陀螺作为对比对象,其与ADXRS622型陀螺仪技术指标对比如表1。
对比表1,这两种陀螺从技术指标上来说ADXRS622除了拥有MEMS器件体积小,重量轻等典型的特点以外,还比VG091A拥有更宽的温度范围和带宽,耐冲击力也远远超过VG091A型光纤陀螺仪。但由于在实际工程中,有很多关于VG091A的应用实例,类似ADXRS622的MEMS陀螺仪却没有得到应用,因此在本文中以ADXRS622为代表,研究MEMS陀螺在视频稳像系统中的应用。
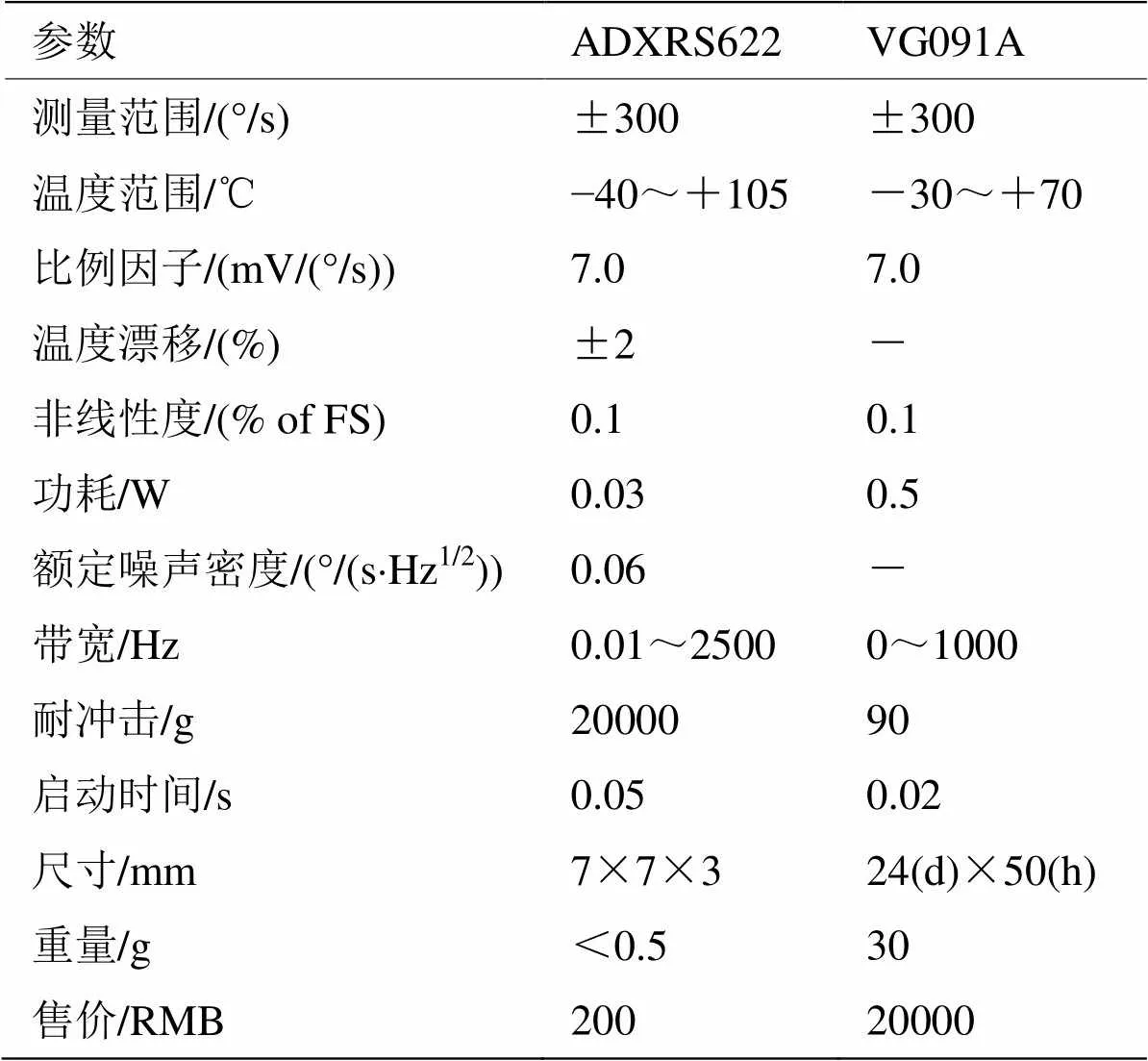
表1 技术指标对比
2 系统设计与实现
2.1 系统方案设计
本试验针对ADXRS622型MEMS陀螺和VG091A型光纤陀螺仪的静态性能和动态性能进行综合研究。为了研究ADXRS622和VG091A的性能,本文设计了一个系统方案如图6,在该系统结构中主要包括电源电路,信号调理电路,AD转换电路,温度补偿电路,隔离电路,DSP,串口以及PC机。其中,陀螺及其它外围电路实时输出旋转载体的运动信息;信号调理电路对输出信号进行差分放大,消除偏置和信号滤波;AD转换电路把陀螺输出的模拟信号转换为数字信号,提供给DSP开发板;DSP可以实现高精度的陀螺数据采集;为了节省时间,便于操作,选择技术成熟的串口助手完成数据接收,数据保存;PC机用来实现数据处理算法。
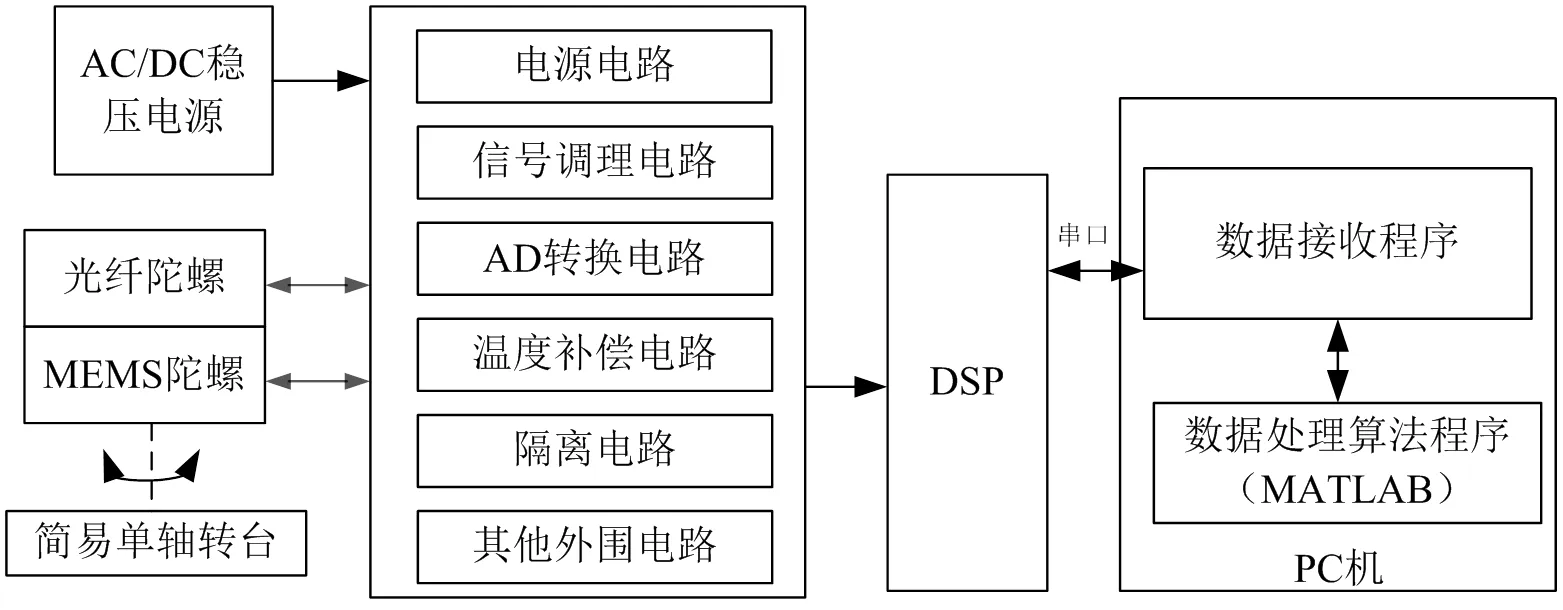
图6 系统设计方案
Fig.6 System design scheme
2.2 硬件系统介绍
2.2.1 AC/DC稳压电源选型
AC/DC稳压电源用于给系统的硬件电路提供直流稳压电源,本文直接借用了试验室配备精密直流稳压电源,具体型号为:Agilent E3631A。
该型设备用于提供1路±12V电源,作为电路系统的供电电源。
2.2.2 二次稳压电路设计
±12V供电电压由AC/DC稳压电源经过滤波后实现。
+5V供电电压,由+12V电压经线性电源LT1963AEQ产生。
2.2.3 信号调理电路
信号调理电路主要完成陀螺输出的模拟信号的放大、滤波、偏置等功能。信号调理电路的核心是低噪声精密运算放大器。综合考虑电压噪声、带宽、增益等因素,本文选择了美国AD公司的低噪声放大器OP27G。该放大器采用±12V电源供电,电压噪声为3nV/Hz1/2,增益带宽积为8MHz。
光纤速率陀螺的输出信号为差分信号,因此采用差分放大形式,放大之后使用1阶RC滤波电路进行滤波。其增益设计为2.0,带宽设计为150Hz,如图7。
MEMS速率陀螺的输出信号为单端信号,并带有+2.5V的直流偏置,因此采用减法放大电路形式,在放大的同时消除其直流偏置。而放大之后也使用了1阶RC滤波电路进行滤波。其增益设计为2.0,带宽设计为150Hz,如图8。
2.2.4 AD转换电路
我们知道,世界是多元的、事物的面目也是多解的。认识事物的方法有多种理念:有理性的科学的方法,也有感性的非科学的方法。就像我们解释世界有科学的、美学的,还有神学的一样。只要为人们所认可,就有它存在的理由。
本设计中的输出信号有速率信号、温度信号,光纤陀螺速率信号这3路信号,因此选取16位六通道同步采样芯片AD7656对MEMS陀螺进行模数转换,采样频率1kHz。AD7656共有两种模拟信号输入模式,一是模拟输入信号为2倍的参考电压(2.5V)即±5V之间,另一种是4倍的参考电压即±10V之间。本设计采用输入信号为±10V之间,以提高采样精度,因此选+5V为AVCC和DVCC供电,±12V为VDD/VSS供电。
2.2.5 温度补偿电路
在ADXRS622两侧各放置一个35W的功率电阻RMG10对陀螺进行加热,模拟各种温度条件,用标定的方法,验证陀螺数据的可重复性。
2.2.6 电气隔离电路
另选用的是NVE公司的IL717高速耦合芯片对信号进行光电隔离,数字信号,控制信号隔离,提高抗噪声能力。这种高速耦合信号拥有4路隔离通道,3个正向通道,1个逆向通道,最高响应速度可达110Mbps。
2.3 软件程序设计
在本设计中采用卡尔曼滤波算法对陀螺仪静态数据进行降噪处理[9-12],首先用时间序列的方法建立陀螺仪的随机误差模型ARMA(2,1),再利用卡尔曼滤波算法进行滤波处理[13],并用Allan方差分析法对卡尔曼滤波算法评价[14-16],其Matlab算法流程如图9。
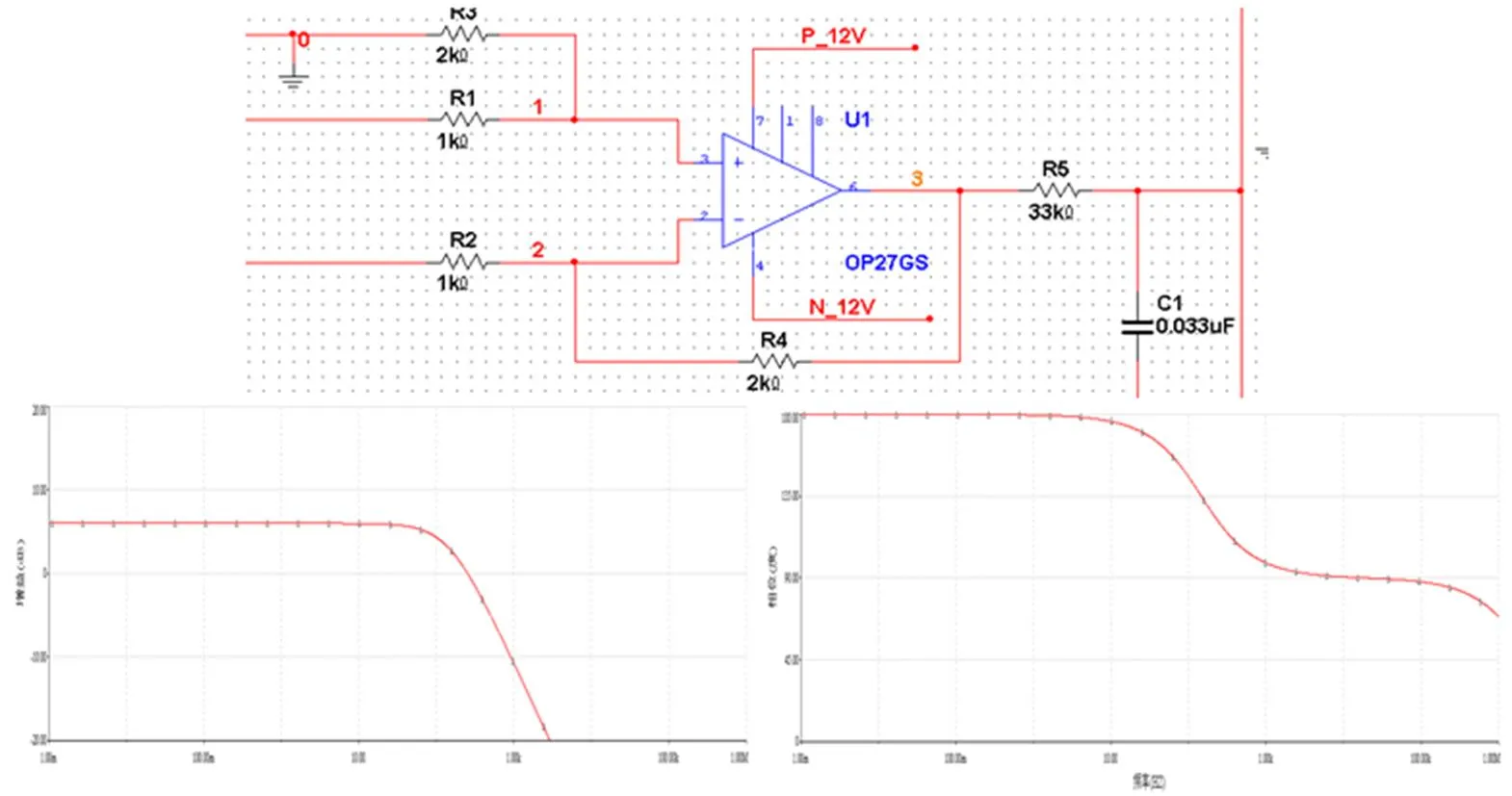
图7 光纤陀螺信号调理电路及其仿真波形
Fig.7 FOG signal conditioning circuit and simulation waveforms
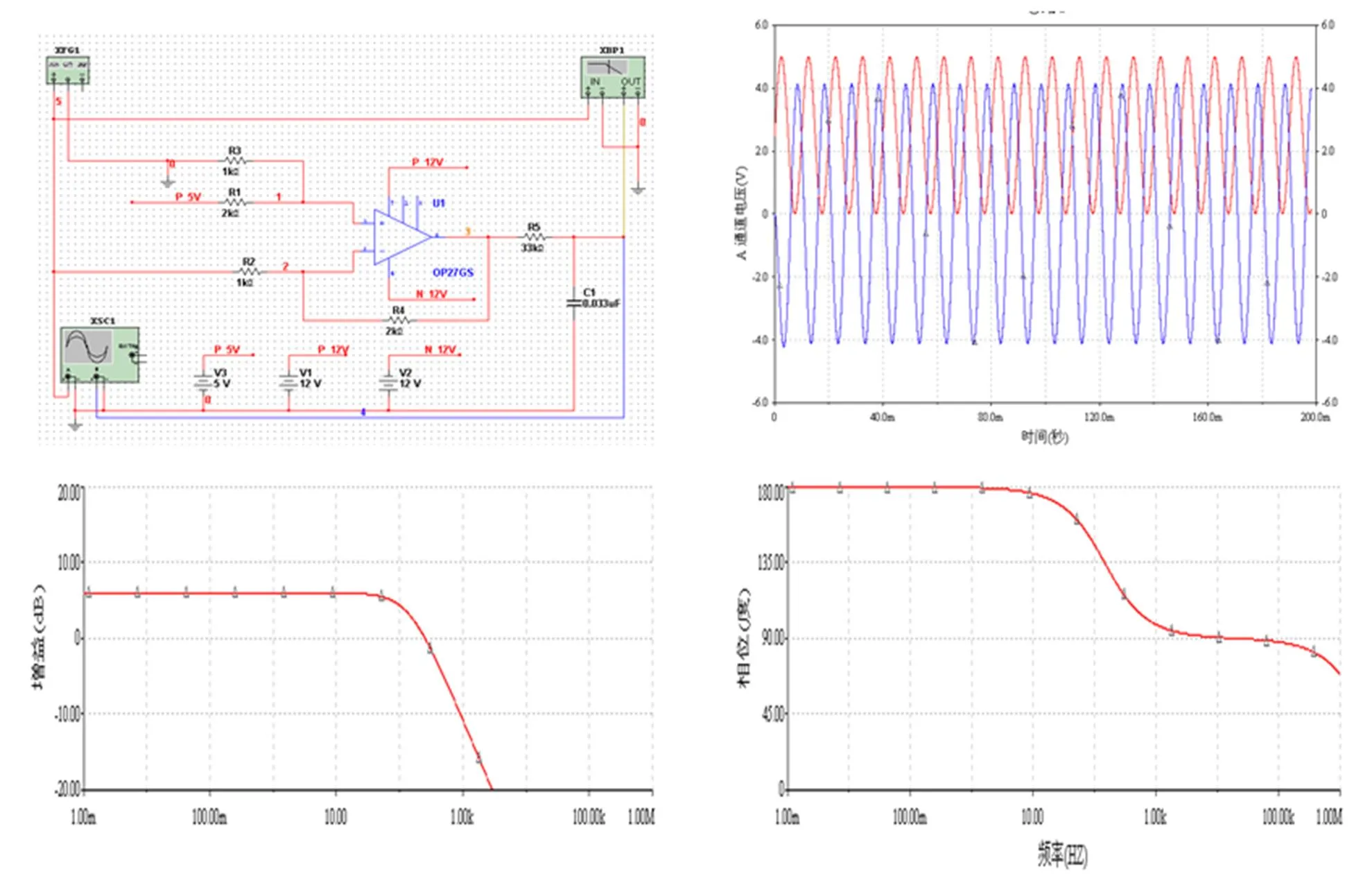
图8 MEMS陀螺信号调理电路
Fig.8 MEMS gyroscope signal conditioning circuit

图9 Matlab算法流程图
Fig.9 The flowchart of Matlab algorithm
3 卡尔曼滤波试验
3.1 试验步骤
25℃室温静态条件下,利用DSP和上位机,以1kHz的采样频率采集一组数据,采样时间1min。由于受上位机程序通讯协议的限制,其接收并保存的频率为500Hz,因此实际的采样频率为500Hz,每2ms保存一个数据。在对采集数据进行预处理后,方可进行经典卡尔曼滤波试验。
3.2 Allan方差分析结果
经典卡尔曼滤波对ADXRS622型MEMS陀螺仪和VG091A型光纤陀螺仪输出的随机噪声信号序列进行滤波,滤波前后对比以及滤除噪声如图10。
经典卡尔曼滤波前后Allan方差对比如图11所示。
经典卡尔曼滤波前后Allan方差分析各噪声分量的结果如表2。
经典卡尔曼滤波前后陀螺随机误差标准差如表3所示。
3.3 试验结论
从图10、11及表2中可以看出,经典卡尔曼滤波对ADXRS622型与VG091A型陀螺仪的随机噪声信号均有一定的滤波效果。对于ADXRS622型陀螺仪,在经过经典卡尔曼滤波处理后,量化噪声约为滤波前的50%,角速度随机游走、零偏不稳定性、速率随机游走、速率斜坡约为滤波前的60%。对于VG091A型陀螺仪在经过经典卡尔曼滤波处理后,量化噪声约为滤波前的50%,角速度随机游走、零偏不稳定性、速率随机游走、速率斜坡均约为滤波前的45%。
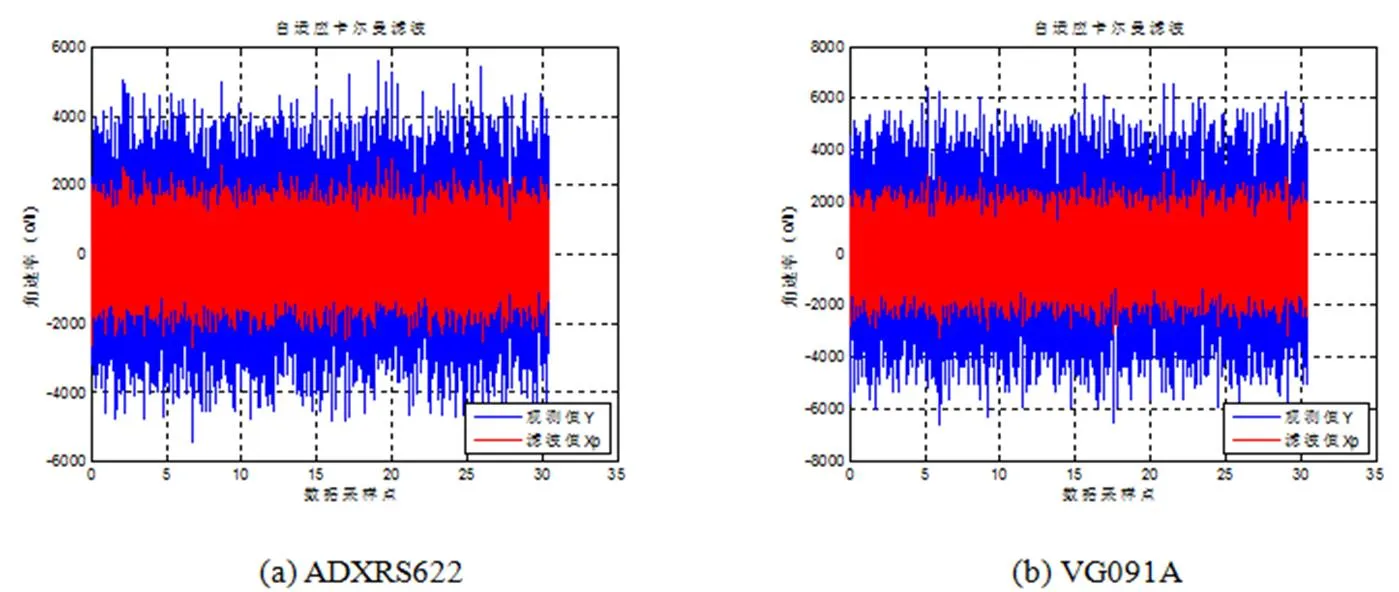
图10 经典卡尔曼滤波前后数据以及滤除噪声

图11 经典卡尔曼滤波前后Allan方差对比图
Fig.11The comparison chart of Allan variance before and after classic Kalman filter
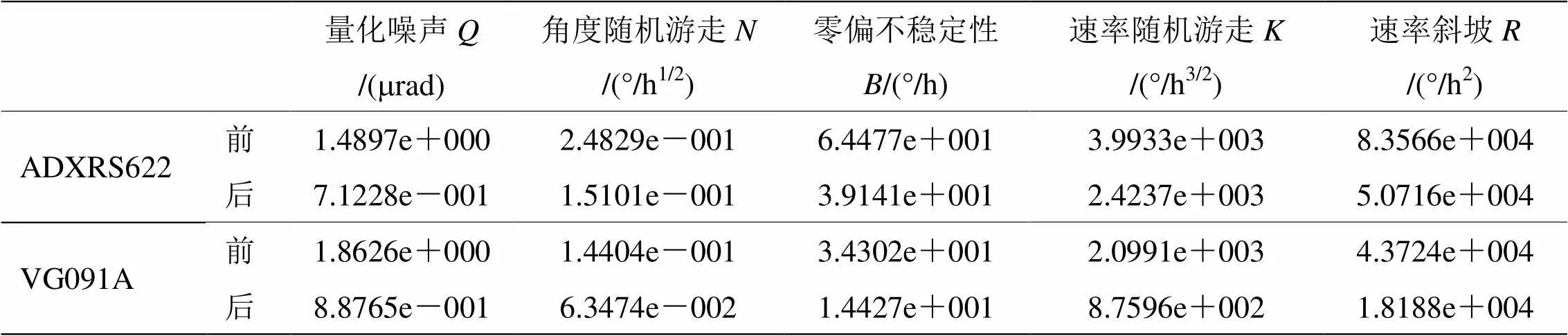
表2 经典卡尔曼滤波前后Allan方差结果
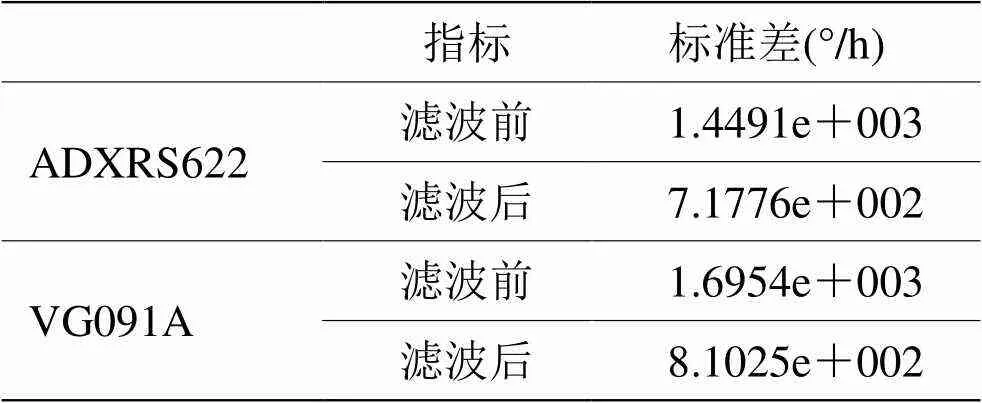
表3 经典卡尔曼滤波前后陀螺随机误差标准差
在表3中可以看出,通过经典卡尔曼滤波之后,ADXRS622型陀螺仪和VG091A型陀螺仪的随机误差标准差均降为滤波前的50%,降低一个数量级。说明经典卡尔曼滤波对ADXRS622型陀螺仪和VG091A型陀螺仪均有明显的滤波效果。
在经过经典应卡尔曼滤波后,ADXRS622型陀螺仪的随机误差标准差比VG091A型陀螺仪的随机误差标准差小12.9%。
4 时间漂移特性
随着时间的变化,陀螺仪的输出也会产生漂移。考虑到在制导应用中,陀螺仪的工作时间并不长,因此需在短时间内考察陀螺仪输出随时间变化的稳定性。
4.1 试验步骤
在25℃室温条件下,采集10组数据为数据样本,每次间隔10min,每次采样1min。
4.2 数据分析
两组陀螺仪的均值及随机误差标准差如图12所示。
4.3 试验结论
从图12中可以看出,随时间变化对Allan方差的影响不大。ADXRS622与VG091A的零点都不在零位上,说明需要设计调零电路对两组陀螺进行零位调整。ADXRS622型陀螺仪的均值整体比VG091A型陀螺仪的均值大很多,这是因为在试验时忽略了ADXRS622型陀螺仪本身的2.5V偏置电压,没有消除其偏置。但是从两组陀螺均值及随机误差的标准差的整体趋势可以看出,陀螺数据趋于稳定,基本不受到时间的影响。
5 温度漂移特性
5.1 试验步骤
在导弹飞行的过程中,温度会有很大的变化,陀螺仪输出随温度的变化也会产生漂移。温度漂移会影响视频稳像系统的精度,因此,研究陀螺仪的温度漂移是十分重要的。
由于ADXRS622型MEMS陀螺仪的温度范围为−40~+105℃,VG091A型光纤陀螺仪的温度范围为-30~+70℃,本试验中选择-30~70℃作为试验温度范围。将安装有MEMS陀螺与光纤陀螺的数据采集电路板放入温箱,在温箱中模拟-30~70℃的温度条件,每间隔10℃并达到稳定温度时,开启电源,采集一组数据来研究两种陀螺仪的输出变化,共采集11组数据,并在Matlab中根据试验结果画出对比图。
5.2 数据分析
-30~+70℃的温度条件,陀螺仪的均值及随机误差标准差如图13。
5.3 试验结论
从图13中可以看出,两种型号陀螺输出的标准差随温度变化均呈非线性变化,ADXRS622型MEMS陀螺仪的均值随温度变化较大,说明其随温度变化的零点漂移比较大。
又因为在数据采集模块的中为了消除ADXRS 622型MEMS陀螺仪的2.5V偏置电压,采用2个电位计设计减法电路。电位计本身的零漂比较大,因此,ADXRS622随温度变化的零点漂移有可能是由电位计引起的。
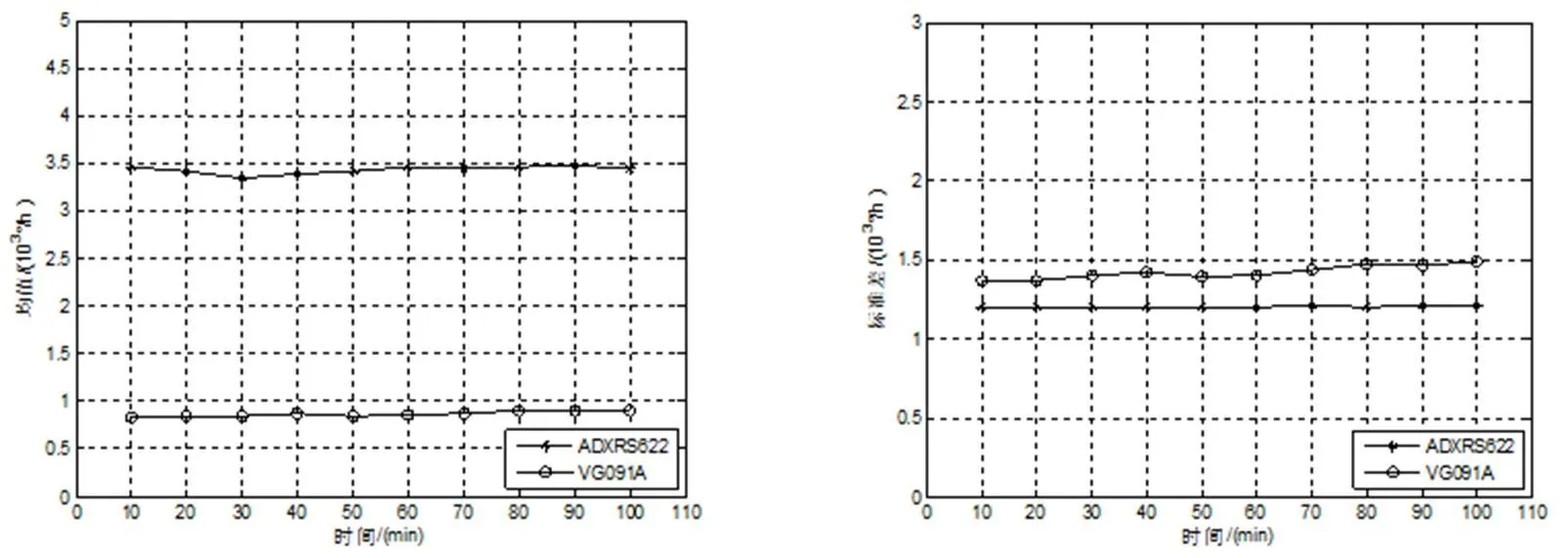
图12 不同时间下的均值与随机误差标准差
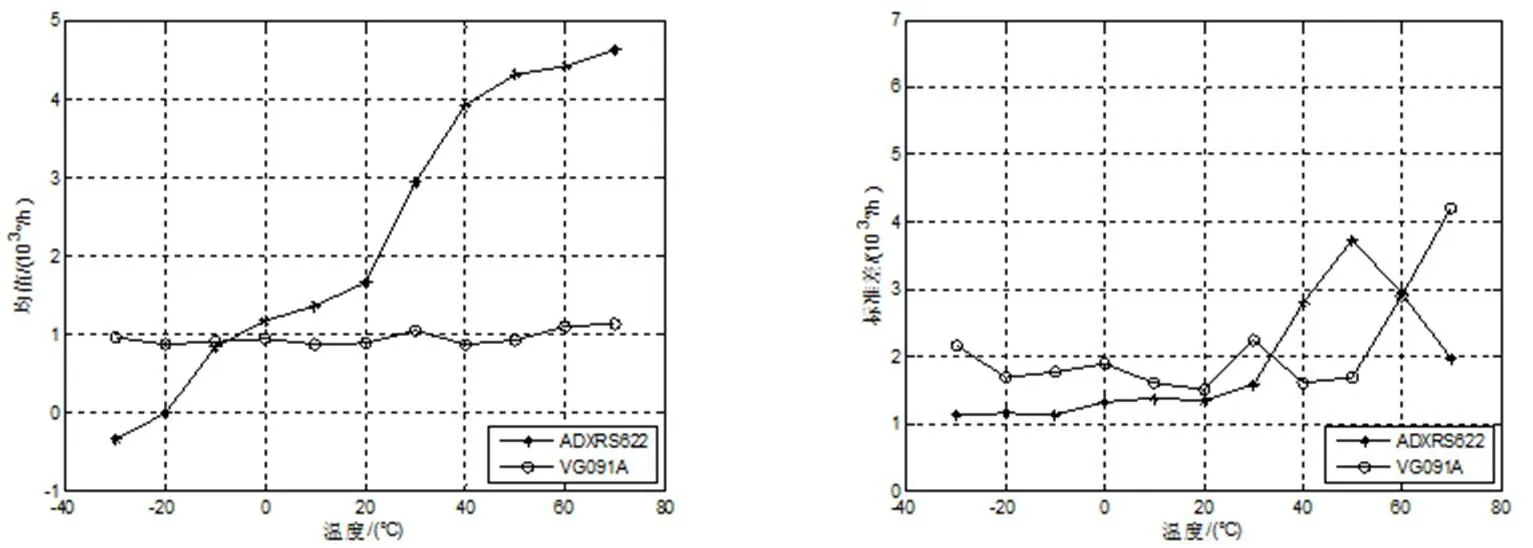
图13 不同温度下的均值与随机误差标准差
考虑ADXRS622型MEMS陀螺仪随温度变化的零点漂移问题比较严重,在以后的应用中应该重点考虑解决其随温度漂移的问题。
6 动态达位试验
6.1 试验步骤
为了测试系统的角速度测量范围和一定量程内的测量精度,需要在转台上对陀螺仪进行动态试验。又由于试验部件连接PC机,受连接导线长度限制,不能360°旋转测试,仅在+40°~-40°的角度范围在内对陀螺仪进行动态达位试验。
将安装有MEMS陀螺与光纤陀螺的数据采集电路板与稳压电源等各试验部件固定在转台上,在+40°~-40°的角度范围内分别以10°/s、20°/s、30°/s、40°/s做达位试验,利用DSP开发板和上位机程序采集并记录10组数据。
6.2 数据分析
将陀螺放上转台,在+40°~-40°的角度范围内做达位试验,结果如图14。
根据表4,做出ADXRS622、VG091A与理论均值对比图如图15。
6.3 试验结论
在图14、图15与表4中可以看出,随着转台角速度的提升,陀螺仪达到稳定时的角速度均值会逐渐偏离理论均值。VG091A型光纤陀螺的偏离幅度比ADXRS622型MEMS陀螺仪更大。说明在测量角速度较大时,ADXRS622型MEMS陀螺仪输出的角速度更贴近真实值,使视频稳像技术的精度更高。
7 正弦扫频试验
7.1 试验步骤
为了研究陀螺仪的频率特性,设计正弦扫频运动试验。由于数据样本较短,仅考虑对研究陀螺仪输出的幅频特性,不再对其相频特性做研究。
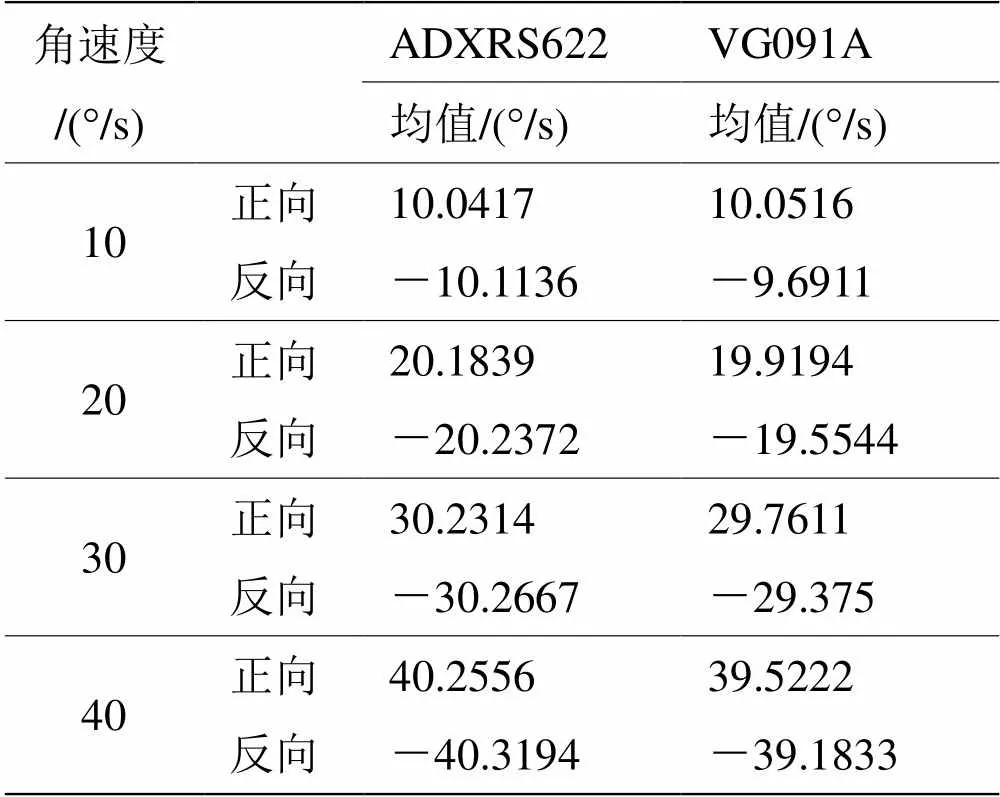
表4 各角速度下平稳时的均值
由于受到转台特性的影响,不能任意设置频率与转台角度,仅选择转台能够承受的几组条件进行试验。并用Matlab对采样数据做快速傅里叶变换(FFT),画出其相应的幅频特性曲线,横坐标表示频率,纵坐标表示速度变化率的幅度。
7.2 数据分析
正弦扫频试验结果如图16。
7.3 试验结论
在图16中可以看出,ADXRS622型MEMS陀螺仪与VG091A型光纤陀螺仪的幅频特性曲线基本一致。图中FFT离散频率与实际信号频率基本重合,说明陀螺仪拥有良好的频率特性。MEMS陀螺仪落在最大频率处的点数比光纤陀螺仪更多,说明MEMS陀螺仪的精度更高。
8 结论
受元器件和技术封锁,高精度MEMS陀螺难以采购,本设验证试验中选择的ADXRE622型MEMS陀螺是一款商业级的陀螺仪,其本身性能并不如技术成熟的光纤陀螺仪。通过本文试验证明,ADXRS622型MEMS陀螺仪的静态和动态性能与VG091A型光纤陀螺仪基本一致。用现有的MEMS陀螺仪替代光纤陀螺仪作为一级稳像系统对载体的运动矢量进行采集,再配合卡尔曼滤波对采集到的数据进行处理,这种稳像方式的基本上能够满足应用在视频稳像系统中的要求,且使用MEMS陀螺仪替代光纤陀螺仪可以使视频稳像系统体积减小、成本降低,更符合未来精致制导武器发展的需求。
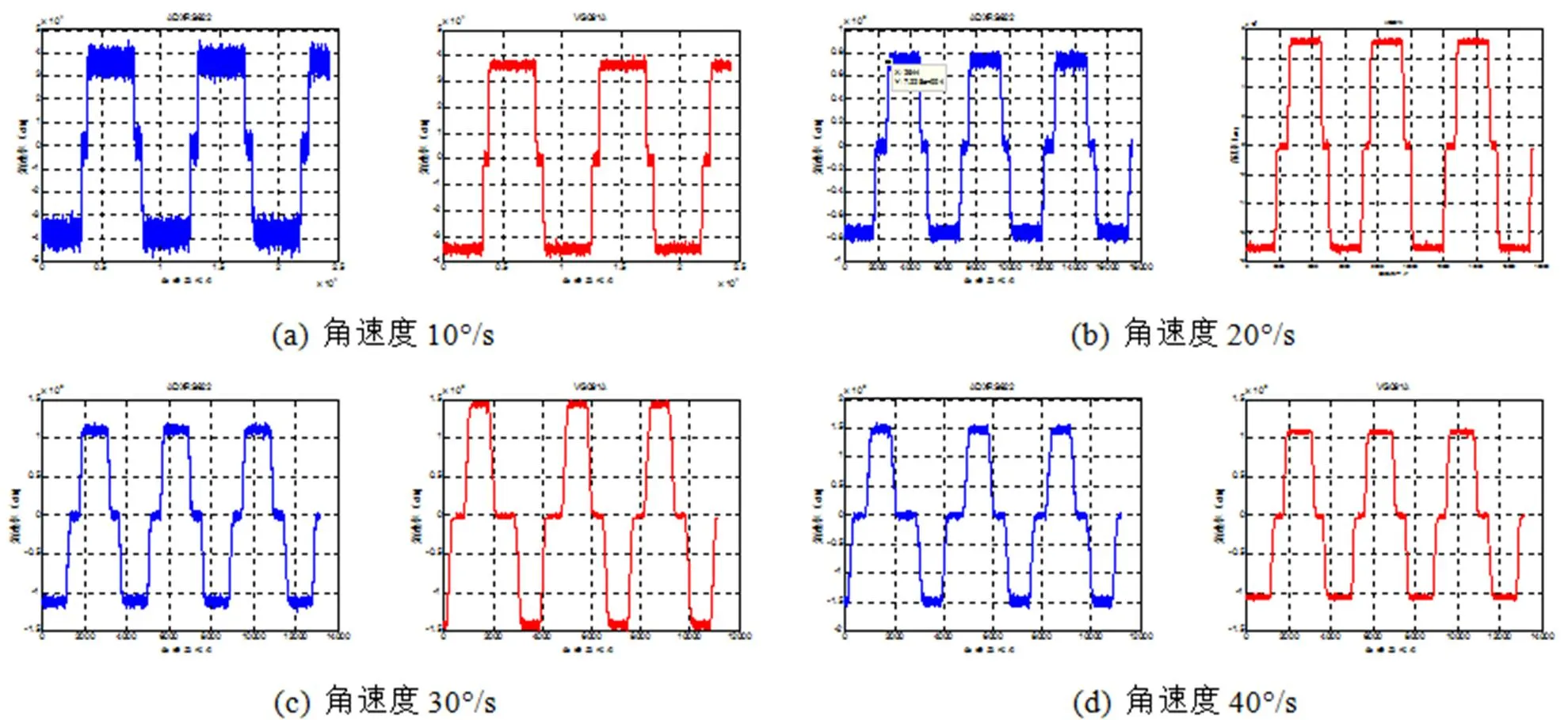
图14 +40°~-40°各角速度达位试验对比
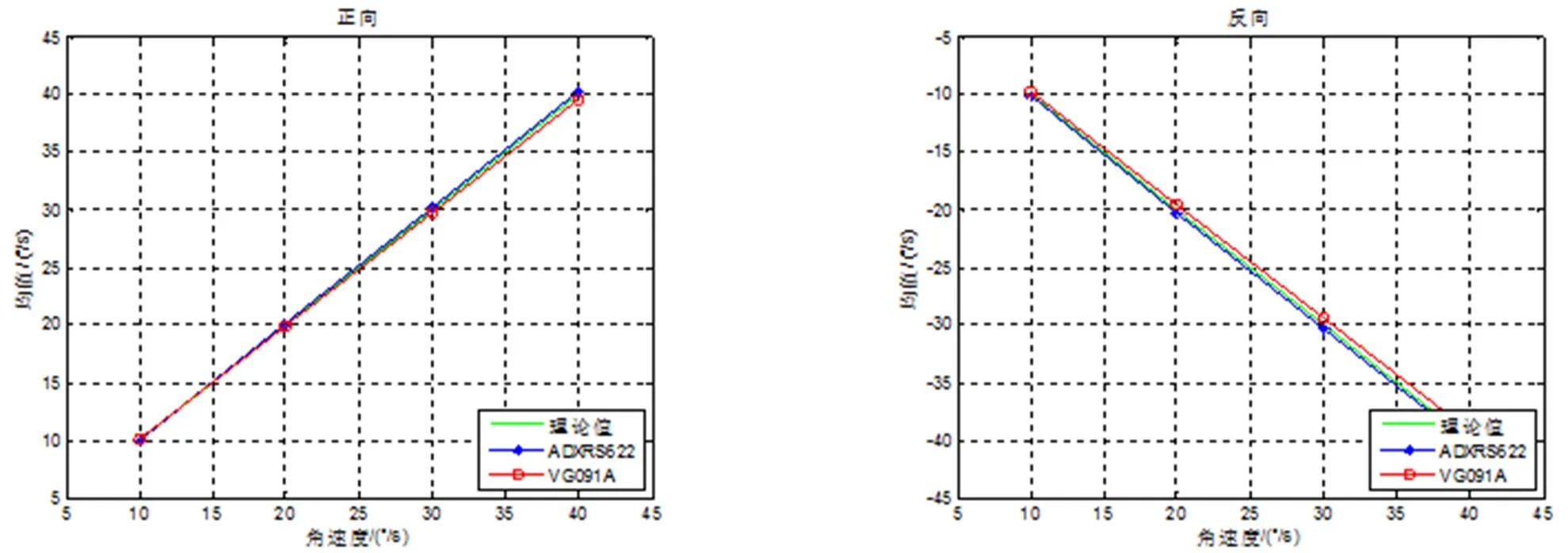
图15 ADXRS622、VG091A与理论均值对比图

图16 两组陀螺正弦扫频运动试验结果
Fig.16 The test results of sine sweep exercise
[1]朱强华, 李胜勇, 姜涛. 稳像技术[J]. 舰船电子对抗, 2006, 29(5): 77-80.
[2]陈盈, 王弘韬, 安成斌. 基于加速度传感器的红外图像稳像技术研究[J]. 光电工程, 2012, 39(8):63-67.
[3]张永祥. 基于陀螺仪的船载电子稳像技术研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2006 .
[4] 柴云峰. 基于光纤陀螺的稳像系统研究[D]. 哈尔滨: 哈尔滨工程大学, 2006.
[5] 王莉强, 宋菲君, 任文杰. 陀螺的分类、原理及应用现状[J]. 电子测量及仪器学报, 2004(Z): 857-863.
[6] 陆芳. MIMU中陀螺随机漂移建模及Kalman滤波技术研究[D]. 太原:中北大学, 2007.
[7] 王志民, 徐晓刚. 电子稳像技术综述[J]. 中国图象图形学报, 2010, 15(3): 470-480.
[8] 赵红颖, 金宏, 熊经武. 电子稳像技术概述[J]. 光学精密仪器, 2001, 9(4): 353-359 .
[9] 朱华征, 周晓尧, 张文博, 等. 光电稳定平台中陀螺随机漂移的处理方法[J]. 中国惯性技术学报, 2009, 17(2): 225-230 .
[10] 张立新. 数字压电陀螺设计及信号处理[D]. 太原: 中北大学, 2012.
[11] 张迎. 基于粒子滤波最优估计的非线性时间序列研究[D]. 天津: 天津理工大学, 2010.
[12] 王可东, 熊少锋. ARMA建模及其在Kalman滤波中的应用[J]. 宇航学报, 2012, 33(8): 1048-1055.
[13] 付梦印, 邓志红, 闫丽萍. Kalman滤波理论及其在导航系统中的应用[M]. 北京: 科学出版社, 2010.
[14] 邹学锋, 卢新艳. 基于Allan方差的MEMS陀螺仪性能评价方法[J].微纳电子技术, 2010, 47(8): 490-498 .
[15] 李晓莹, 胡敏, 张鹏, 等. 交叠式Allan方差在微机械陀螺随机误差辨识中的应用[J]. 西北工业大学学报, 2007, 25(2): 225-229.
[16] 王建政, 王辉, 范作娥. 基于Allan方差的MEMS陀螺随机误差项辨识[J]. 软件, 2013, 34(2): 75-78.
Applications of MEMS Gyroscope in Infrared Imaging Systems
HAN Ying,HUANG Jian-xia,GAO Yuan
(,471000,)
This paper describes the principles of the image stabilization technology in the infrared imaging guidance system and points out the important position of gyroscope in the auxiliary equipment electronic image stabilization system. Currently, the domestic auxiliary equipments often use fiber optic gyroscope (FOG) system. This paper analyzes the pros and cons of FOG, and compares with the emerging MEMS gyroscope . Then an experimental program is designed to prove that MEMS can replace FOG in practical applications, and has more advantages than FOG in performance, size and price.
image stabilization technology,electronic image stabilization,fiber optic gyroscope,MEMS gyroscope,Kalman filtering
TN409
A
1001-8891(2015)03-0248-10
2014-03-10;
2014-06-12.
韩颖(1988-),女,浙江温州,汉族,硕士研究生,主要从事红外导引信息处理技术。E-mail:hyloveconan@163.com。
