基于288×4探测器的扫描型热像仪外同步实现方法的研究
2015-03-28朱光明罗志斌朱洪洋崔光德
朱光明,张 巍,贾 赞,罗志斌,杨 帆,王 敏,朱洪洋,崔光德
基于288×4探测器的扫描型热像仪外同步实现方法的研究
朱光明,张 巍,贾 赞,罗志斌,杨 帆,王 敏,朱洪洋,崔光德
(昆明物理研究所,云南 昆明 650223)
讨论了基于288×4探测器热像仪外同步功能的局限,提出了一种将热像仪扫描采样流程与视频输出流程在时序上“脱钩”的办法,使热像仪能够与存在误差的外同步信号同步,该方法已在某扫描型热像仪上得到了实现。
288×4探测器;外同步;探测器积分周期
0 引言
热像仪是一种将热图像进行光电转换并输出视频图像的仪器。当它与其他设备组成一个系统,并相互配合工作时,需要与整个系统的运行“节奏合拍”。一般情况下,系统会统一向各组成部分提供一组外同步信号进行同步控制,故热像仪需要具备相应的同步功能。基于288×4探测器的扫描型热像仪在国内外被广泛使用,选择此型热像仪实现外同步具有很高的实用价值。
1 现有热像仪的外同步功能及其局限
法国SAGEM公司的IRIS热像仪、THALES公司的SOPHIE和CATHERINE系列热像仪、英国与德国合作的SYNERGI热像仪等均使用288×4探测器[1],该探测器是针对输出PAL制式的视频图像而设计的。这些热像仪都具备相应的外同步功能,现对法国SAGEM公司大量出口的CATHERINE-FC热像仪进行分析。
CATHERINE-FC热像仪具有基于模拟信号和数字信号的外同步功能。其模拟外同步接口要求输入符合PAL制式的模拟视频信号。同步过程如图1所示。使用视频同步分离芯片从模拟视频信号中提取出数字化的复合同步信号作为热像仪同步的基准。热像仪将图像处理后的数字视频信号与提取出的复合同步信号进行时序同步后输出到数模转换器,即可得到同步后的模拟视频图像。而对于数字外同步接口,则要求输入符合PAL制式的数字视频复合同步信号。在视频同步时可以省去视频同步分离芯片,而其他同步过程与模拟端类似。
复合同步信号由多个行同步、均衡和开槽脉冲信号组成,同步基准点较多,以该信号作为外同步信号进行的同步处理,具有实现原理简单、同步性能优越等优点。在需要精确控制的伺服系统或要求严格匹配的图像采集[2]、视频跟踪[3]、图像叠加融合[4]系统中热像仪采用此方法可获得较好的同步效果。
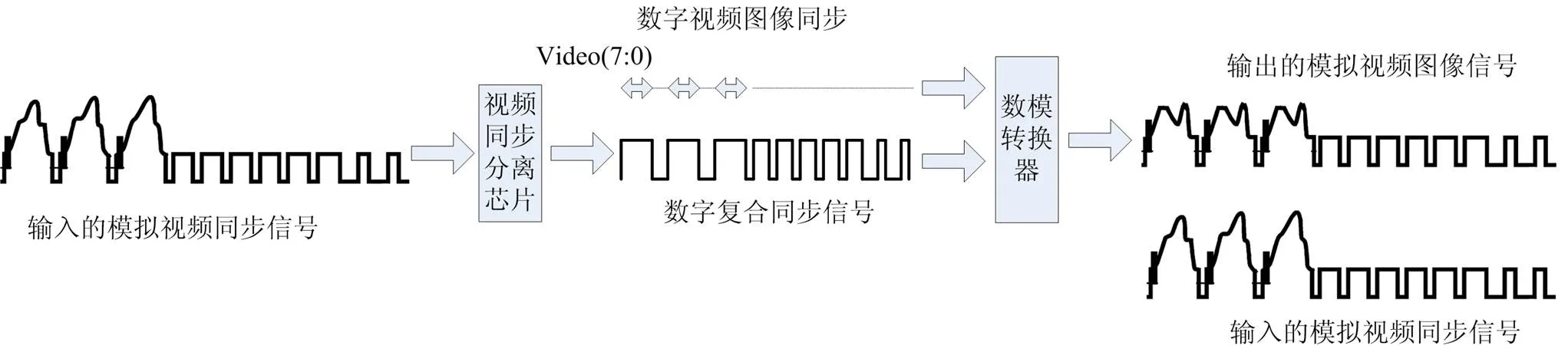
图1 热像仪模拟接口同步原理
基于288×4探测器的热像仪,早期主要应用在军事领域,在武器系统设计时已对热像仪的同步性能进行充分考虑。基于整个武器系统实时性和精确性的要求,通常采用标准视频信号作为系统的同步信号。随着红外技术的发展,热像仪规模化生产后成本的降低,基于288×4探测器的热像仪逐渐开始应用于森林防火、电力监控和边防巡逻等众多领域。在这些领域内,当前系统在设计时并没有针对热像仪进行适配,采用的同步信号类型也各不相同,对热像仪外同步性能的要求也存在差异。这些民用系统在设计时更注重系统的兼容性,从而适当放宽了对各部件的同步性能的要求。此类系统通常采用类似图2的形式,使用一个周期为的脉冲信号作为同步信号。以脉冲信号的上升沿或下降沿作为同步的基准点或触发点来使用,并且对周期的误差容许范围也比较大。
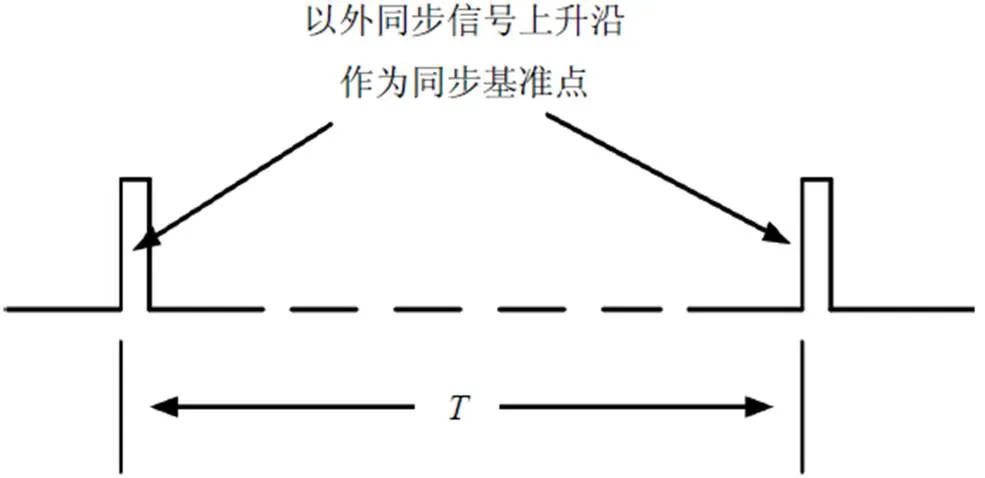
图2 周期为T的同步信号
此类同步信号的信号形式与PAL制式视频格式不一致,不能与以CATHERINE-FC为代表的热像仪同步,即使采用转接视频同步生成器的方式(将图2中的同步信号转换为热像仪可接收的视频同步信号),也存在系统生成的同步信号精度不高,或同步信号在系统内传输时受到干扰、传输线延迟过大、各部份信号接收阻抗不匹配等一系列问题,这些问题将导致同步信号的时间周期存在不可忽视的误差。该误差将导致视频同步生成器产生的视频同步信号与标准视频信号存在差异,使得热像仪外同步功能失效,或者同步后热像仪输出图像存在闪烁、滚动、黑屏等现象。所以,需要改变热像仪的同步机制以适应不同的系统需求。
2 外同步机制的制约因素
扫描型热像仪的主要特点在于使用线列探测器通过扫描的方式成像。线列探测器的拓扑结构和扫描成像方式很大程度上决定了扫描型热像仪输出视频图像的分辨率。同时,热像仪输出的视频图像的显示格式也受到外同步信号的制约。因此热像仪外同步功能的实现需要将探测器拓扑结构和扫描成像方式纳入设计考量。
2.1 288×4探测器的拓扑结构和运行模式
288×4探测器的拓扑结构[5]如图3所示,在垂直方向(方向)上有288个通道(每个通道含有4个像元)。为达到在方向上的完全覆盖的目的,288个通道按奇偶顺序左右放置。在扫描方向(方向),将4个像元的输出按照时间延迟积分的形式完成累加,每一个积分周期结束后顺序输出288个通道的信号。
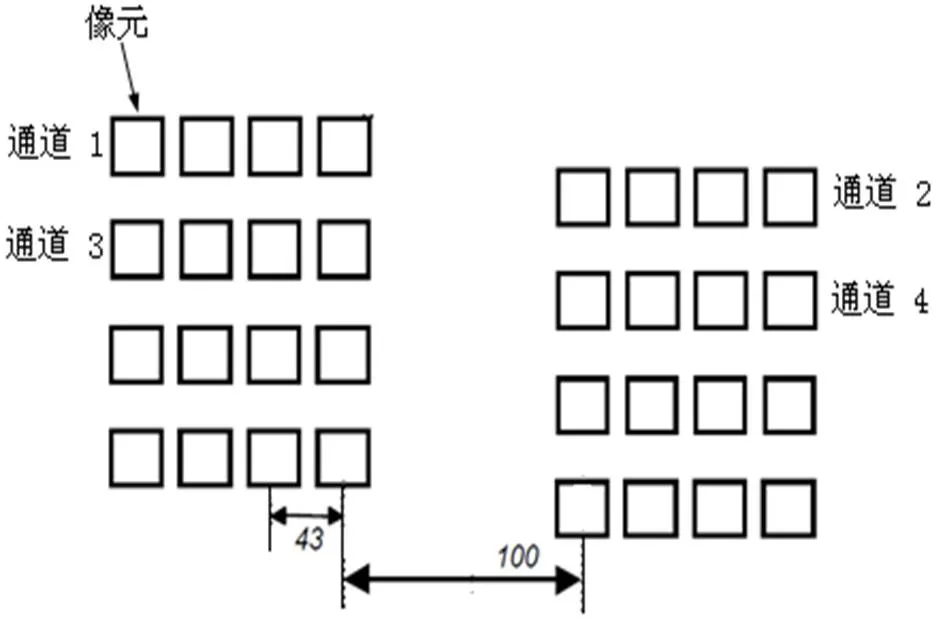
图3 288×4探测器拓扑结构图
由于288×4探测器特殊的结构形式,扫描后需要对探测器输出的奇偶通道进行“对齐”处理,才能获得正确的图像。扫描型热像仪是通过扫描器将所观察的场景按时间顺序依次“扫描”进探测器来实现扫描成像,可通过对奇通道的输出信号延时若干个积分周期的方法,使奇通道与偶通道的输出信号对齐。因此可以认为每一个积分周期探测器输出一组288×1的线列图像信号。
2.2 扫描成像原理简介
热像仪通过控制扫描电机带动扫描反射镜转动实现对场景的扫描,并将该场景反射到探测器上。与此同时,探测器在积分信号的控制下进行光电转换及时间延迟积分并输出列形式的图像信号。当扫描电机完成一个扫描周期的工作后,将探测器输出的各列图像信号进行拼接并做相应图像处理,可得到一幅所观察场景的热图像。而扫描运动曲线、扫描效率和探测器积分周期之间的相互匹配程度将直接影响到扫描成像的效果。
扫描型热像仪大多采用控制精度高的有限转角无刷直流力矩电机[6]作为扫描电机,其扫描运动曲线如图4所示。扫描电机的工作特点为:在一个扫描周期(0)内保证一段时间(0)的匀速转动工作,以获得连续的扫描场景,得到无畸变的热图像;并在较短非线性区域内完成扫描电机的复位,为下一个周期的线性扫描做好准备。
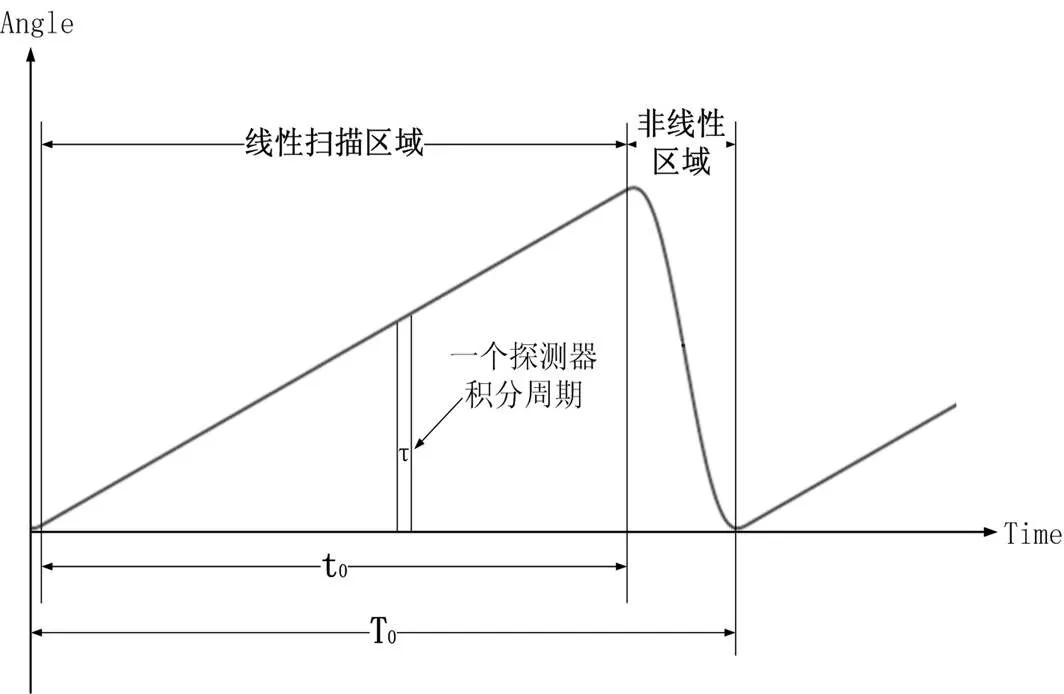
图4 扫描运动曲线
在此可定义上文中的扫描电机匀速转动时间与扫描周期的比值为扫描效率。设扫描效率为,则可表示为:
=0/0
热像仪输出的视频图像由探测器拓扑结构及其延时积分机制、扫描电机的扫描效率及其线性度、光学系统的设计、以及输出视频需满足的显示格式要求共同决定。基于288×4探测器的热像仪输出的视频格式遵循PAL制式的格式要求,将连续两场扫描的图像使用隔行显示的方式合并为一帧视频图像。在水平方向,理论上需要在线性扫描区域内输出768列对齐的图像。从探测器拓扑结构图可算出,在每通道的4个像元完成积分后,将奇偶通道输出的信号进行对齐,至少需要延迟[(383-25)×3]/43≈25个积分周期来实现。所以在线性扫描范围内,探测器理论上最少需要进行768+25=793次积分才能输出一场完整的图像。若设探测器积分周期为,则其理论值为:=(×0)/973。
现有的高线性大摆角扫描器[7]可在50Hz的扫描频率下,±10°的扫描幅度内,达到85%的扫描效率。在对探测器积分周期和运行时钟进行设定时,以不超过扫描效率为前提进行约束,可用如下方法进行计算:采用该扫描器的热像仪的扫描周期为20ms,其探测器的理论积分周期为(20×85%×1000)/793≈21.44ms。若根据288×4探测器手册[2],探测器积分周期至少应包括76个探测器运行时钟周期,可估算出满足成像要求的最小探测器运行时钟频率为76/21.44≈3.54MHz。实际工程应用中,很难使用有限的元器件资源合成任意频率的时钟信号,一般将晶振产生的时钟信号通过分频或倍频处理后使其频率接近理论计算值即可。可使用通过36MHz的晶振10分频得到的3.6MHz(>3.54MHz)的时钟信号作为探测器运行时钟。由于探测器为4路输出,则热像仪图像处理时的像素时钟频率为3.6×4=14.4MHz。若热像仪输出的视频像素时钟也采用同一频率,则视频显示范围内的水平分辨率为14.4×52≈749,而探测器积分周期也将随之改变。最终基于实际应用的考虑,探测器积分周期为79/3.6≈21.94ms,输出视频分辨率为749×576,满足热像仪实际需求的扫描效率为:

从上述计算可以看出,热像仪输出的视频受到众多因素的影响,需对各方面的因素进行综合考量,最终得到优化组合的使用参数。而由于外同步功能的引入,代入了新的影响因素,对参数的优化组合提出了新的适应性要求。
2.3 适应外同步导致的问题
若外同步信号周期的误差为±0.1%,将其代入系统设计,则首先需要考虑误差对扫描周期造成的影响。扫描周期可分为线性扫描区域和非线性扫描区域两个部份,±0.1%的周期误差不论放在那个区域都会对最终的图像质量造成影响。
若将周期误差引入非线性扫描区域,由于扫描系统总是最大限度地缩小非线性扫描区域以提高扫描效率,同时在非线性扫描区域内扫描电机需要完成减速、转向、快速回扫、再次减速和转向等一系列运动。扫描电机大部分时间都处于极限工作状态,可调控的余量不多。一旦周期误差超出扫描系统的允许范围,扫描电机将会出现不稳定,甚至失控状况,如图5所示。
综上所述,由于外同步周期误差的引入,打破了扫描系统的稳定运行状态,同时由于其误差的不确定性,导致扫描系统很难重新建立起新的可靠运行体系,从而使得扫描型热像仪对外同步信号适应性较窄,无法满足不同系统的要求。
3 “追逐同步”方法的实现
对于实时性要求不高的系统,其允许的外同步误差范围较大,外同步信号形式简单易于捕捉。此类系统具有优秀的兼容能力,能够将更多的设备纳入系其控制范围。而扫描型热像仪由于扫描成像机制的制约,很难通过调整热像仪系统的时序关系来跟踪实时变化的外同步信号。本文使用将热像仪扫描采样流程与视频输出流程在时序上“脱钩”的办法来解决上述问题。
3.1 “追逐同步”方法的原理
将2.2节中优化组合后的参数设置于扫描采样流程中,并以20ms为周期稳定运行;视频输出流程则按照外同步周期的要求,完成视频图像输出时序的调整;这样就实现了上述两个流程在运行周期上的“脱钩”。由于这两流程都运行在同一个时钟(即像素时钟)频率上,若它们的周期时间长度一致,则可在外同步开始时,通过对热像仪扫描图像处理系统进行重新置位的方式,使热像仪工作时序与外同步基准点一致,即可实现视频输出的同步。若它们的周期时间长度由于系统误差的原因存在差异,可以通过“绕圈追逐”的方式,让周期短的一方“追逐”周期长的一方,待双方差距累计到20ms(即“一圈”)时,通过舍弃或重复一场图像数据的方法实现双方差距的清零,然后继续维持“绕圈追逐”的方式运转,这样就可以在不影响热像仪成像的情况下实现视频输出的同步。
要在热像仪上实现“绕圈追逐”的方法,需要在其图像处理进程中增加一个视频同步模块(如图6所示)。该模块的作用是缓存扫描图像数据,并按照外同步信号的要求输出视频图像。视频同步模块由一个512k×8bit的双端口存储器和一个控制器构成。控制器操控存储器其中一个端口,将扫描结束后缓存的一场图像数据以每行749个像素(已完成奇偶通道对齐)的形式按行顺序写入存储器。当控制器被外同步基准点触发时,配合输出视频的时序以行顺序在存储器的另一个端口读出图像数据。最终将读出的图像数据与复合同步信号进行时序匹配后,即可输出同步的视频信号。由于对存储器的读写都运行在同一个像素时钟频率下,视频同步模块实现的难点仅限于控制器在到达“追逐”临界点时对存储器的同一个地址同步进行读写的处理方式上。若写入周期和读出周期相等,则不存在“追逐”的情况,所以仅就写入周期与读出周期存在差异的情况进行分析。
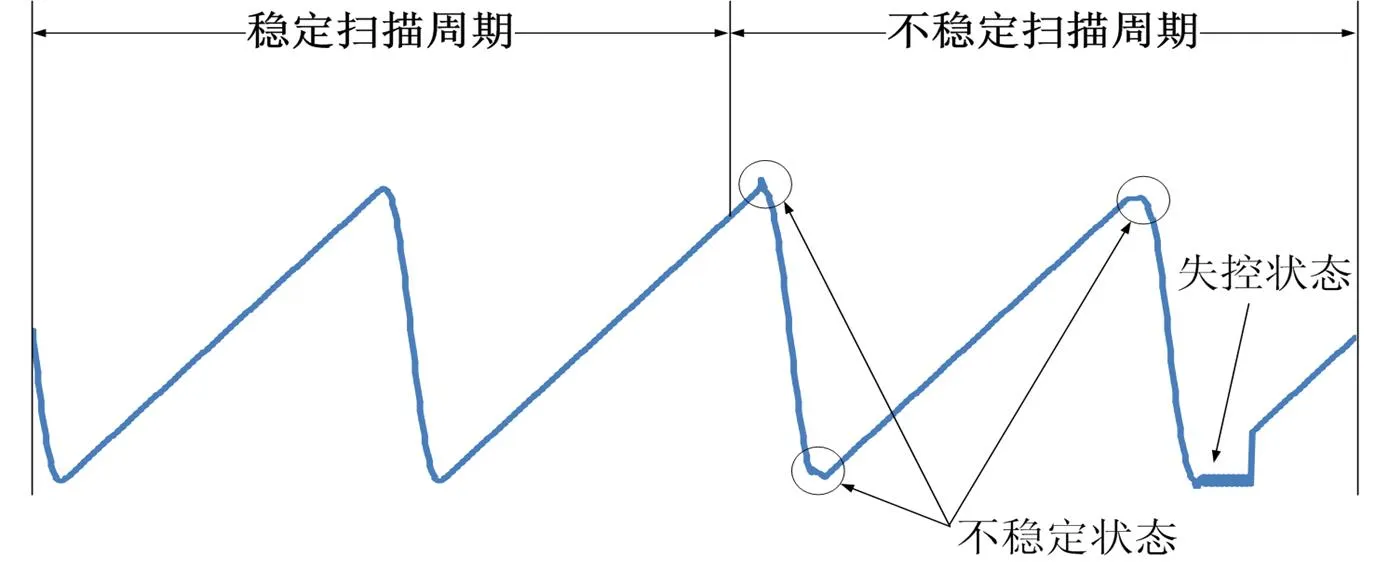
图5 扫描电机的不稳定和失控状态
Fig.5 Scanning motor in lost-stability and lost-control
当按扫描周期写入的时间大于按外同步周期读出的时间时,用如图7所示的方法处理。
图7中的A、B、C、D代表按扫描周期写入图像数据的时间段,a、b、c、d、e代表从存储器中按外同步周期读出图像数据的时间段。由于按扫描周期写入的时间较按外同步周期读出的时间长,则可视为读出周期在“追逐”写入周期。当按扫描周期写入的B周期开始时,按外同步周期读出的b周期也同时开始读出数据,则读出周期b此时追上了写入周期B,到达“追逐”的临界点。由于控制器对写入和读出操作的速率相等,则其可以在B周期写入图像数据的同时,将图像数据直接赋值到存储器读出端的数据输出口,即在读出的b周期内不从存储器内读出数据,而直接使用存储器写入端的数据。而在读出的c周期开始时,写入端C周期的图像数据还未到达,所以读取的是B周期写入存储器的图像数据作为当前场的数据输出,这样在输出的视频数据中将有两场相同的图像数据先后显示。而在其它未达到临界点的周期时间内,按外同步周期读出的图像数据都是由按扫描周期事先写入存储器的,在图7中表示为A对应a、C对应d、D对应e的写入与读出之间的关系。
当按扫描周期写入的时间小于按外同步周期读出的时间时,用如图8所示的方法处理。
图8中H、I、J、K、L代表按扫描周期写入图像数据的时间段,h、i、j、k代表从存储器中按外同步周期读出图像数据的时间段。由于按扫描周期写入的时间较按外同步周期读出的时间短,则可视为写入周期在“追逐”读出周期。当按外同步周期读出的j周期开始时,按扫描周期写入的K周期也同时开始向存储器写入数据,则写入周期此时追上了读出周期,到达“追逐”的临界点。由于控制器对写入和读出操作的速率相等,则其可以在K周期写入图像数据的同时,将图像数据直接赋值到存储器读出端的数据输出口,即在读出的j周期内不从存储器内读出数据,而直接使用存储器写入端的数据。而在读出的k周期开始时,写入的L周期已对存储器进行了一段时间的操作,于是读取L周期写入的图像数据作为视频数据输出。由图8还可看出,按扫描周期写入的J周期的图像数据没有被读出显示就被K周期写入的图像数据覆盖,视频同步模块对J周期的图像数据做舍弃处理。而在其它未达到临界点的周期时间内,按外同步周期读出的图像数据都是由按扫描周期事先写入存储器的,在图8中表示为H对应h、I对应i的写入与读出之间的关系。
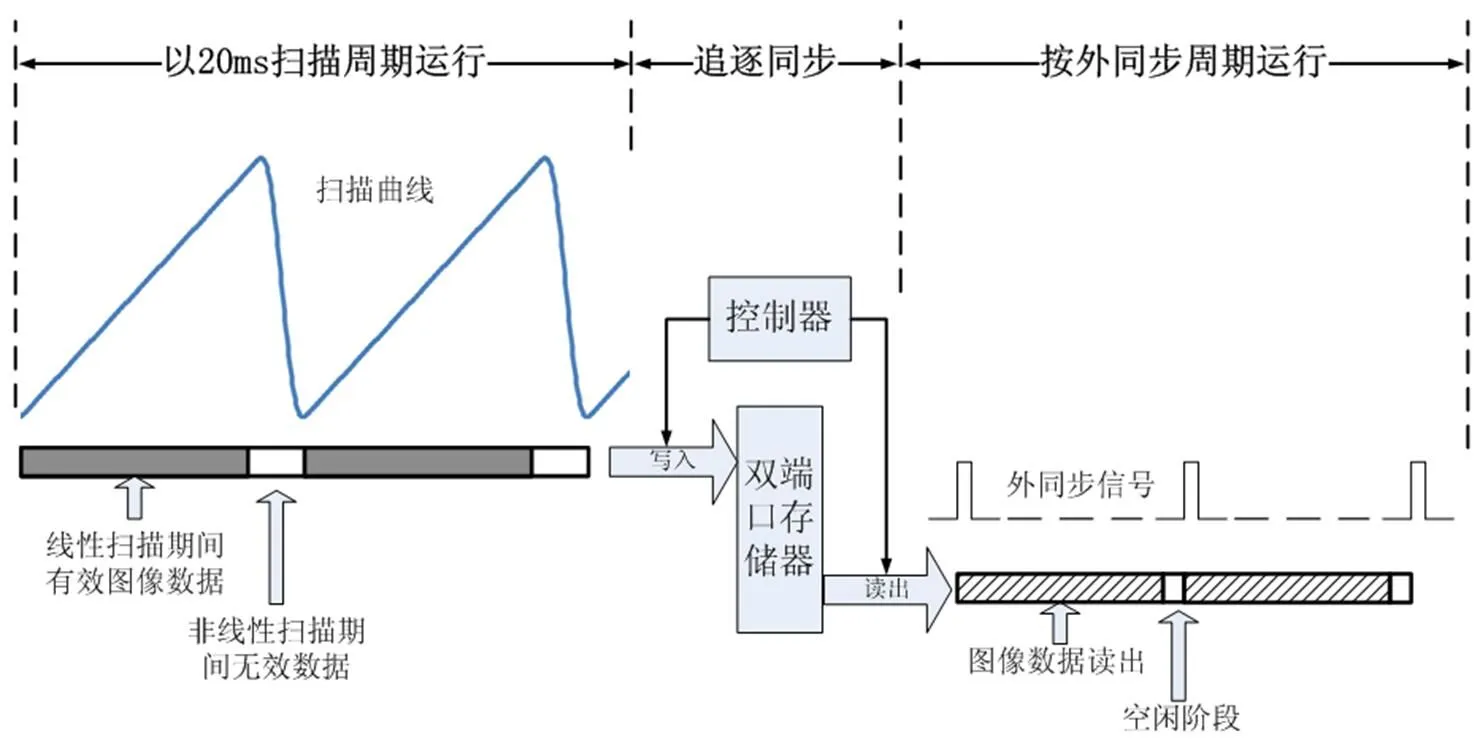
图6 “追逐同步”实现原理
Fig.6 Theory of “chasing synchronization”
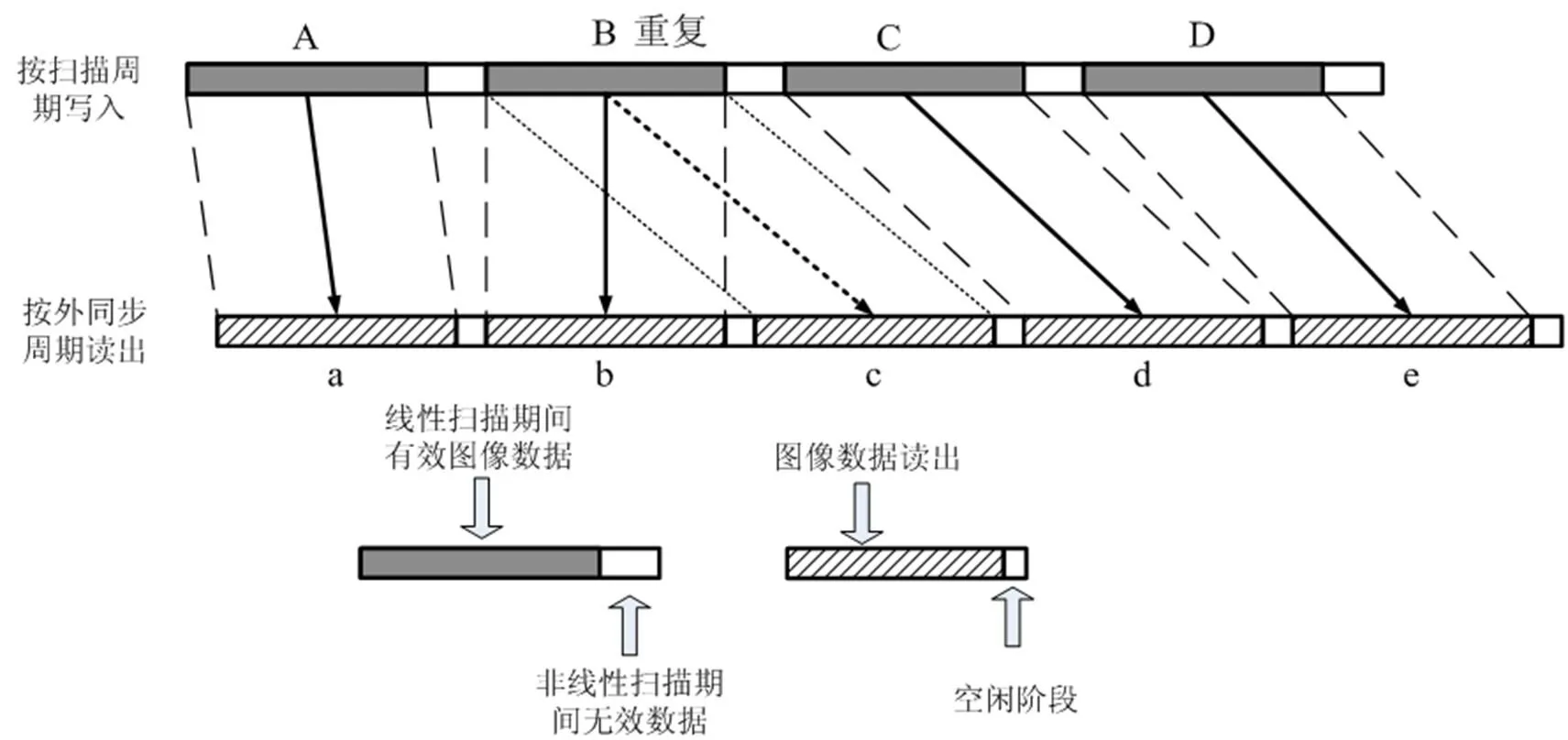
图7 写入周期大于读出周期
Fig.7 Writing period longer than reading period
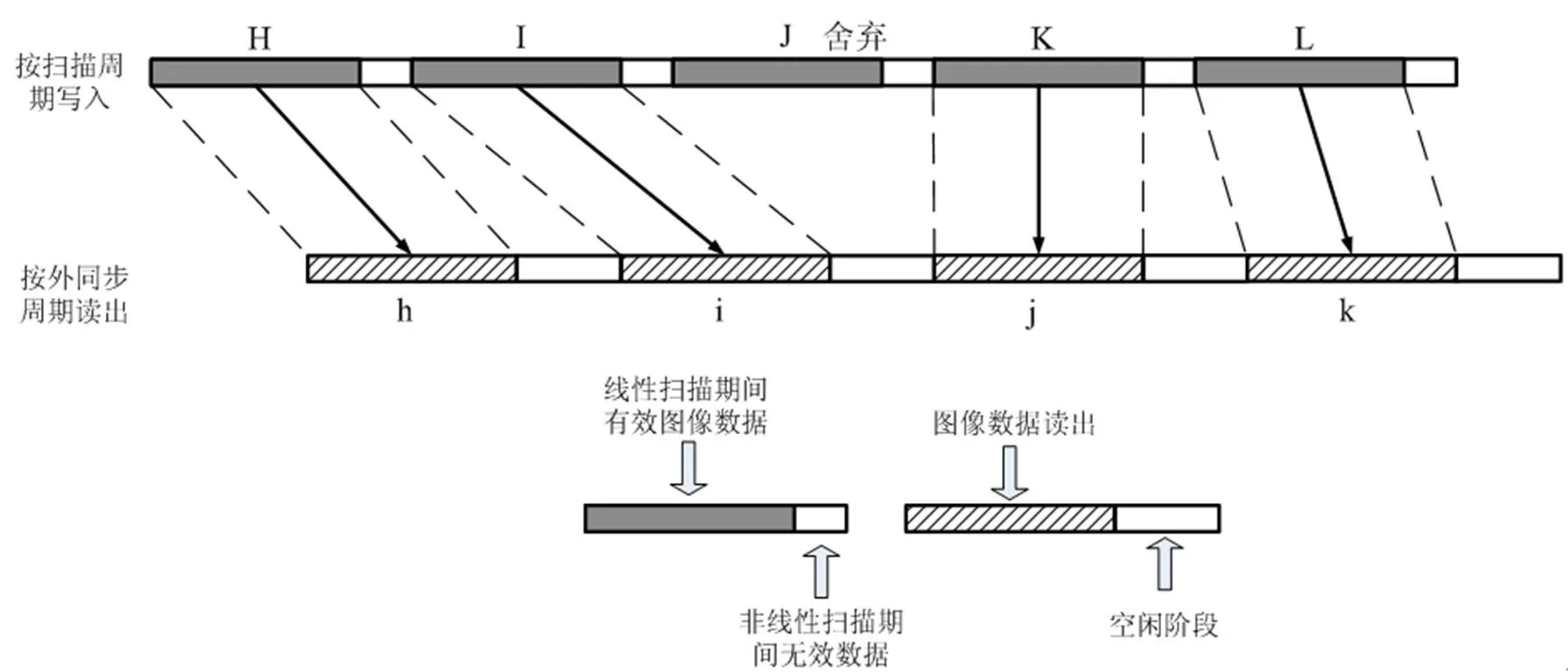
图8 写入周期小于读出周期
Fig.8 Writing period shorter than reading period
3.2 “追逐同步”方法的软硬件设计
3.1节讨论的同步方法已经在某热像仪上使用FPGA实现,其软件设计框图如图9所示。
FPGA对输入的外同步信号进行检测,一旦检测到外同步基准点就开始以计数的方式对外同步周期长度进行测量计数,当检测到下一个外同步基准点时,在保存计数结果后对计数器清零,并重新对下一个外同步周期长度进行测量。FPGA对保存的计数结果进行判断,若测量到的外同步周期长度在热像仪的同步能力范围之内,则运行热像仪同步进程,否则热像仪将按照自身的时序规格输出视频信号,并告知外部系统热像仪外同步功能失效。
热像仪同步进程开始后,在第一个外同步基准点对热像仪扫描和图像处理系统进行重置,使热像仪内各部分都有一个新的起点。然后按照3.1节提出的外同步实现原理,通过对双端口存储器读写地址的比较来判断图像写入和视频读出之间的“追逐”关系,当读写地址不同时,视频输出模块将输出从双端口存储器中读出的图像数据;当读写地址相等时,视频输出模块将当前场的图像数据直接作为视频数据输出;故无论读写地址是否相同,热像仪都可输出同步后的视频信号。
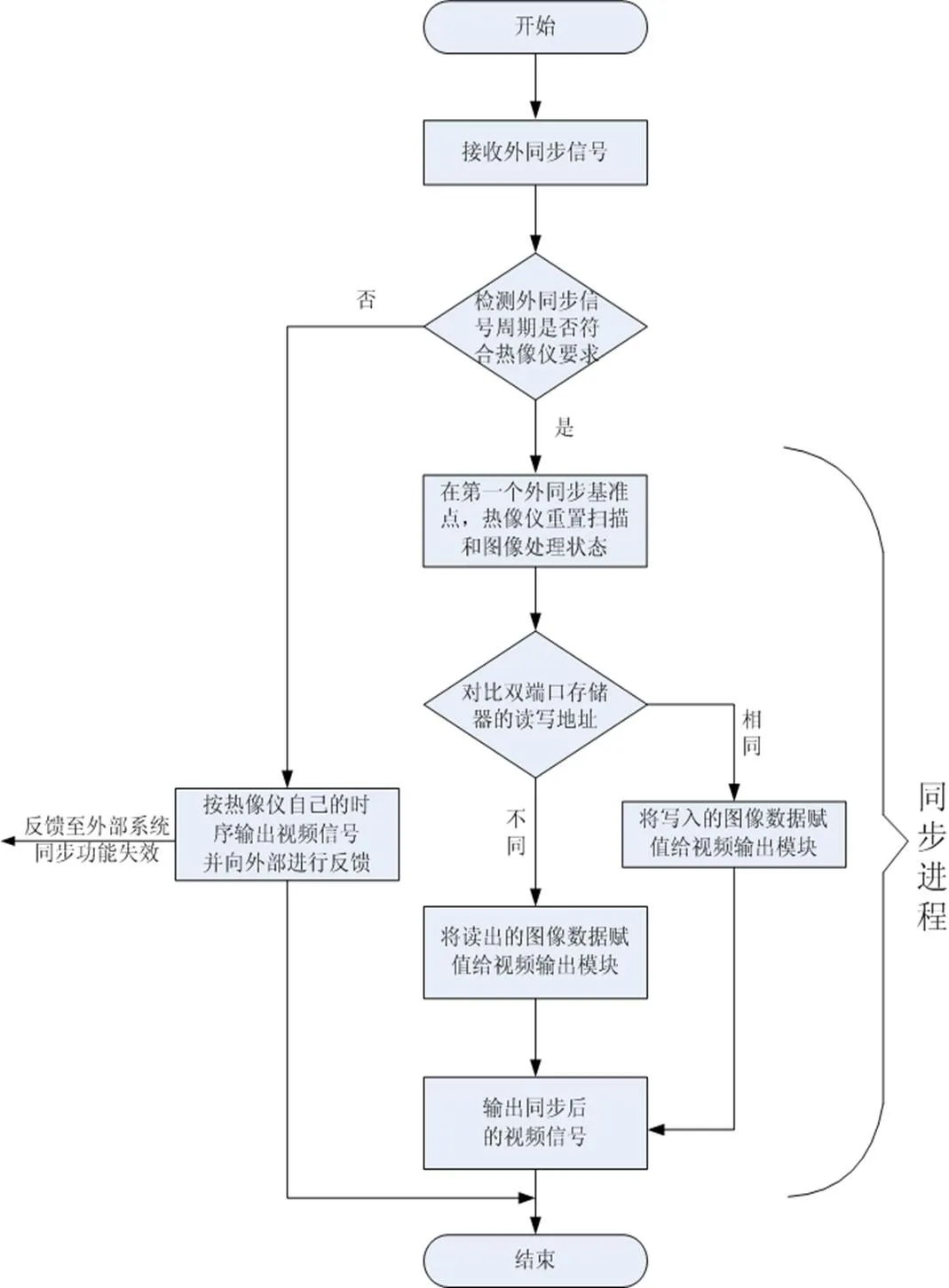
图9 外同步运行流程
3.3 “追逐同步”方法的实验过程及结果
为验证“追逐同步”方法在扫描型热像仪上的运行情况,泰克公司的AFG 320任意函数发生器作为外同步信号的信号源,泰克公司的DPO 7254示波器作为视频信号同步的检测设备,JVC公司的TM-H150CG作为热像仪输出视频图像的观察设备,整个实验平台如图10所示。

图10 实验平台
首先,使用任意函数发生器向热像仪输入以20ms为周期的方波作为外同步信号。热像仪输出的视频图像在监视器上显示正常,同时可以从示波器上观察到热像仪输出的模拟视频信号、外同步信号和扫描器位置反馈信号处于同步状态,同步波形如图11所示。
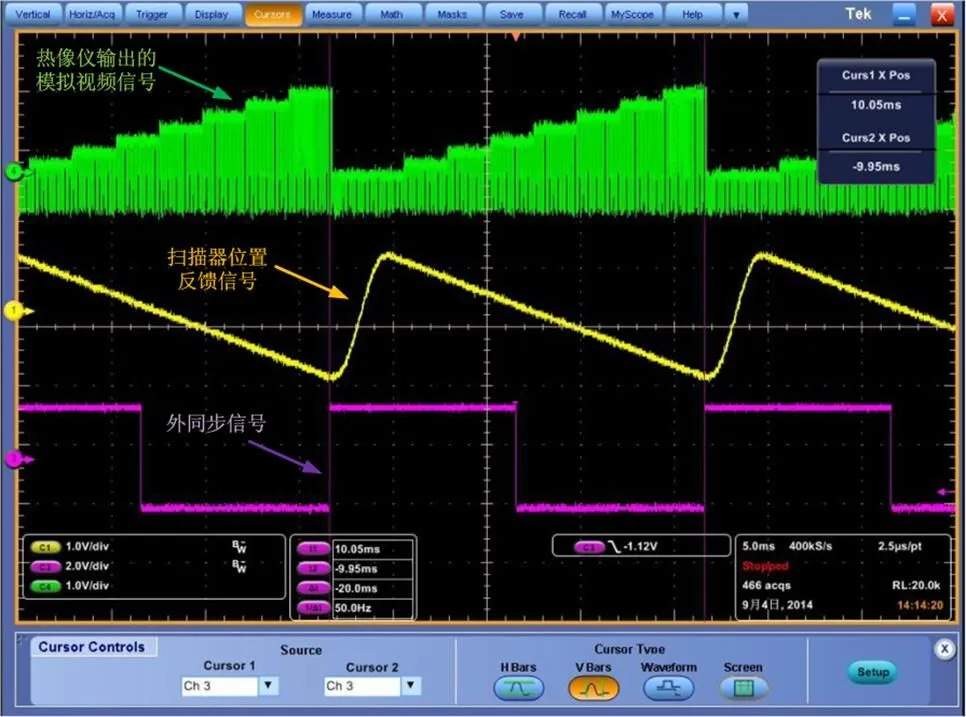
图11 外同步信号周期为20ms的同步状态
其次,使用任意函数发生器向热像仪输入的以20ms±2ms为周期的方波作为外同步信号。热像仪输出的视频图像在监视器上显示正常,同时从示波器上观察到热像仪输出的模拟视频信号与外同步信号处于同步状态,而与扫描器位置反馈信号则处于“脱钩”状态,热像仪中的“追逐同步”算法运行状态良好。同步波形如图12所示。
最后,通过任意函数发生器向热像仪输入的以20ms±16ms为周期的方波作为外同步信号。因为此时热像仪输出的视频信号已不符合PAL制式视频格式标准,超出监视器的显示能力范围,故其输出的视频图像已不能在监视器上正常显示,出现滚屏及闪屏等现象。
为保证热像仪在工作状态下能够输出可正常显示模拟视频图像,需要针对周期误差超过±2ms以上的外同步信号在同步时做特殊处理:若以20ms为周期的外同步信号出现周期误差超出±2ms以上的情况,热像仪模拟视频图像输出将放弃与外同步信号同步,改为与内部扫描系统同步,以实现模拟视频图像的正常显示;同时由于数字视频信号有比模拟视频信号更广泛的适应范围,将数字视频信号与扫描器位置反馈信号“脱钩”,使用“追逐同步”方法实现数字视频信号与外同步信号的同步,即模拟视频信号与扫描器位置反馈信号同步,数字视频信号与外同步信号同步,如图13所示。
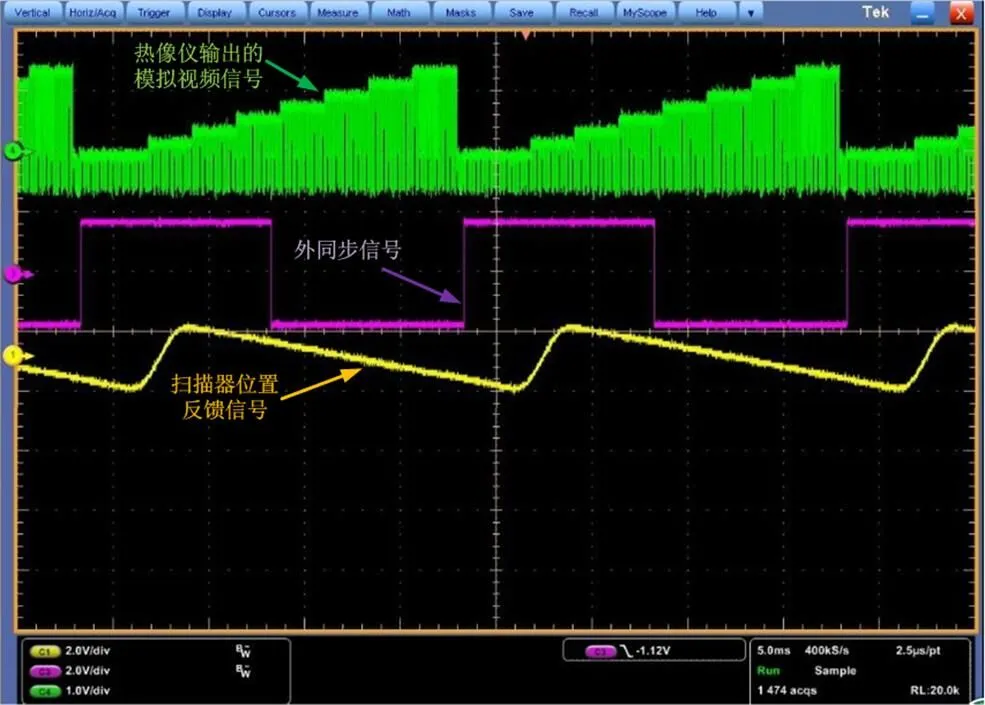
图12 外同步信号周期为20ms+2ms的同步状态
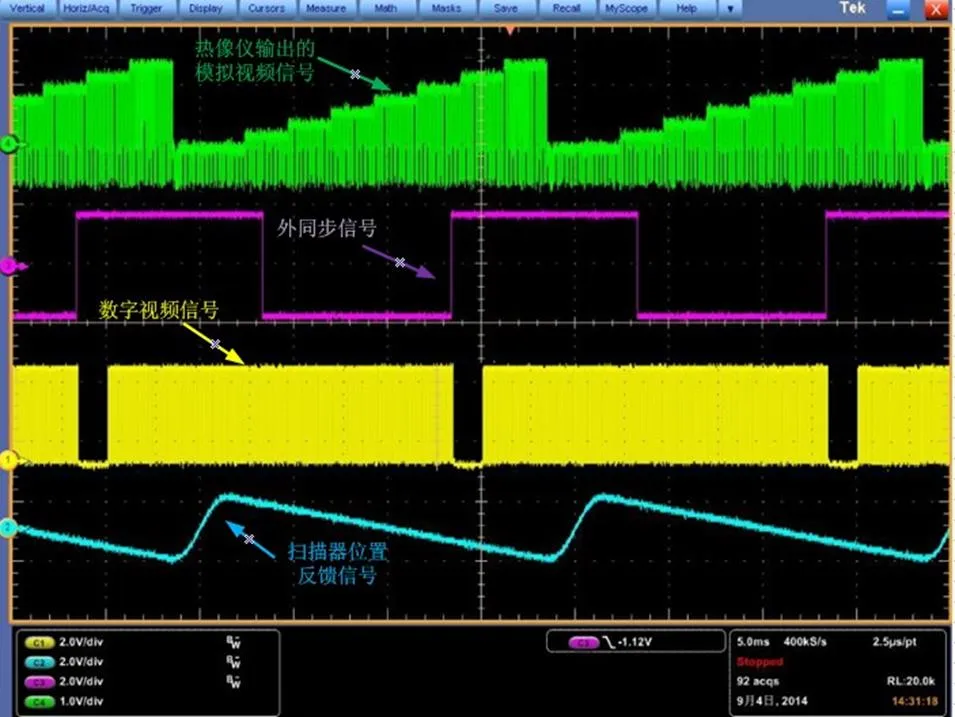
图13 同步误差大于2ms的同步情况
4 结语
本文所采用的外同步方法提高了基于288×4探测器热像仪的同步能力。在确保积分周期与扫描速度相互匹配的同时,使热像仪的外同步性能可适应更广泛的系统需求。当外同步信号误差过大时,则将某场的视频图像进行重复或舍弃处理。本方法还可以对不同的视频显示规格进行调整,从而适用于采用240×4、480×6或576×6等探测器的扫描型热像仪。
[1] Alain Manissadjian, Patrice Fillon, Philippe Tribolet, Sofradir IR detectors for LW applications[C] //, 2004, 5251: 45-55.
[2] 白士贤, 石美红, 姜寿山, 等. 基于Camera Link的线阵CCD外同步控制设计与实现[J]. 电子测量技术, 2010, 33(11): 77-80.
[3] 乔建社, 周旭东. CCD相机的锁相设计[J]. 半导体光电, 2006, 27(4): 475-477.
[4] 高睿华, 李雪萍. 低空导航吊舱系统视频处理模块中MC6845的编程及外同步控制电路设计[J]. 航空计算技术, 2000, 30(2): 29-31.
[5] Sofradir. PLUTON LW K508 288×4 LWIRCMOS Integrated Detector Dewar Cooler Assembly(IDDCA) With Microcooler Type K508 Technical Specification[Z]. France: Sofradir, 2005.
[6] 张深. 直流无刷电动机原理及应用[M]. 北京: 机械工业出版社, 1996.
[7] 陈洁, 朱江, 浦恩昌, 等. 高线性大摆角扫描技术研究[J]. 红外技术, 2013, 35(12): 793-797.
Research on Implementation of External Synchronization in Scanning Thermal Imager Based on 288×4 Detector
ZHU Guang-ming,ZHANG Wei,JIA Zan,LUO Zhi-bin,YANG Fan,WANG Min,ZHU Hong-yang,CUI Guang-de
(,650223,)
This paper discusses the limitation of external synchronization in thermal imager based on 288×4 detector, and develops a solution to make thermal imager synchronized with an external sync signal which has an uncertain sync error. This solution decouples the procedure of scanning and sampling from the procedure of video output, which has been achieved in some scanning thermal imager already.
288×4 detector,external synchronization,integration cycle of detector
TN216
A
1001-8891(2015)03-0240-08
2014-08-19;
2014-11-20.
朱光明(1981-),男,本科,主要研究方向:红外图像处理。E-mail:35313509@qq.com。
