基于故障检测的城市轨道交通仿真平台控制系统设计
2015-03-27邬芝权
邬芝权, 翟 旭, 靳 桅
(西南交通大学峨眉校区 计算机与通信工程系, 四川 峨眉山 614202)
基于故障检测的城市轨道交通仿真平台控制系统设计
邬芝权, 翟 旭, 靳 桅
(西南交通大学峨眉校区 计算机与通信工程系, 四川 峨眉山 614202)
设计了能监测信号设备状态的沙盘控制系统,通过设置故障来构建城市轨道交通运营非正常工况实验环境。采用Visio、Altium Designer、keil uvision4工具,设计了信号机驱动和检测电路、道岔驱动电路和检测电路,并为联锁主机提供通信接口。联锁主机既可以控制沙盘上的信号设备,也可以检测信号设备状态,从而实现对故障的检测。系统建成后,通过故障点设置,可以训练学生故障处理、应急处理和预案实施能力,为高校、铁路局培训单位和研究部门的教学、培训和科研提供服务。
城市轨道交通; 仿真平台; 故障模拟; 控制系统
西南交通大学峨眉校区的城市轨道交通控制实验室是教育部改善基本办学条件的一个实验室建设项目。该实验室构建了城市轨道交通运营的仿真环境,主要建设了5个训练平台,即:(1)基于城市轨道交通运营模拟沙盘构建的城市轨道交通运营仿真平台;(2)列车运行控制和网络行车技术设备操控平台;(3)基于车站信号控制及ISCS底层软硬件技术的控制、运营及行车组织仿真管控训练平台;(4)基于调度指挥中心列车信号监控系统、DCS系统构建的轨道交通ATS监控信号联锁及网络行车组织仿真管控训练平台;(5)多控制系统协调联动和综合调度指挥训练平台[1-3]。
城市轨道交通运营仿真平台的设计思路是构建城市轨道交通中列车追踪、列车折返等过程仿真,通过模拟城市轨道交通运营中的非正常工况和典型案例,训练学员对突发事件、应急预案的分析和处理能力。目前应用在沙盘上的控制系统一般仅能对沙盘上的信号设备进行简单控制,没有检测回馈功能,控制系统不知道控制是否到位,在沙盘上设置的各类故障也不能回送至联锁主机,无法模拟城市轨道交通运营的非正常工况。
要在沙盘上对信号设备设置故障,前提条件是控制系统能读回信号设备的状态。本控制系统的特点在于它周期性采集沙盘信号设备的状态信息,并将状态信息即时回送给联锁主机,可以通过设置故障来仿真城市轨道交通运营的非正常工况。
1 控制系统及其接口
在沙盘上使用的信号设备主要是信号灯、转辙机道岔、发车表示器和紧急停车按键。沙盘信号设备主要集中在车站部分,线路上较少,以开关量数据为主,但数据量不大。控制系统接口的设计要考虑信息速度,数据格式,抗干扰性,沙盘布线的便捷性、实时性和可扩展性等因素。RS-485接口采用差分信号,其优点是抗干扰性强、组网容易、接口芯片价格便宜、传输距离长,通信速度能满足控制和检测的需要,非常适合作为控制系统与联锁主机的通信接口。
在图1所示的控制系统结构中,多个控制系统通过RS-485总线连接到联锁主机,由联锁主机检查信号设备的逻辑关系,接入城市轨道交通控制中心进行统一管理。控制系统包括信号机驱动和检测、道岔驱动和检测、接口和协议3部分,发车表示器和紧急停车按键的可以采用信号灯驱动及检测电路来完成[4-6]。
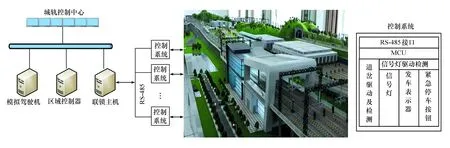
图1 控制系统结构
通信接口采用具有瞬变电压抑制功能的差分收发器SN75LBC184,不需要外接芯片保护电路。在RS-485网络终端使用120 Ω的终端电阻,每个节点的RS-485接口始终处于接收数据状态,当向联锁主机发送数据时切换为发送模式。控制系统MCU选用STC12C5A60S2,RS-485接口连接至MCU的UART接口。MCU要对RS-485网络进行数据收发操作,只需要对UART操作即可。
RS-485为半双工通信模式,数据以串行方式传输,一帧数据的结构包含同步字符、地址、数据长度、数据和校验(见图2)。为了区分数据流动的方向,从联锁主机至沙盘流向的数据帧的同步字符使用0xAB,返回的数据帧使用的同步字符为0xCD。地址为控制系统中固化的一个唯一地址,存储在STC单片机的EEROM区域中。命令字包含读写地址、读写道岔状态、读写信号灯状态、写发车表示器、读紧急停车按键状态等。数据帧的第3字节决定数据长度,最后一个字节为校验字。

图2 通信接口及协议
2 信号灯驱动及故障检测
沙盘上的信号灯数量多,采用不同颜色的发光二极管,驱动电路一般串接一个电阻即可。对信号灯检测主要是要检测信号灯的正常、短路、断路和接地等几种状态。不同LED的点亮电压不同,红、黄色为1.8~2.5 V,绿色为2.7~3.3 V。当信号灯两端压降在LED点亮电压范围内,LED信号灯会正常点亮。如果信号灯不正常,则需要判断信号灯是处于短路、断路还是接地的故障状态[7-9]。
使CMOS门电路翻转的输入电平阈值总为电源电压的1/2,并随电源波动。根据这个特点,设计了检测辅助电路(见图3(a)),将信号灯电压的判断转换为逻辑值的判断。由于沙盘上信号灯很多,每32个灯位设计一张信号灯驱动及检测卡,板卡采用SPI总线级联(见图3(b))。控制数据由串入-并出移位寄存器74HC595送出,检测数据由并入-串出移位寄存器74HC165回送,移位寄存器采用CMOS工艺,每2位管理一个信号灯。

图3 信号灯驱动及检测电路
在图3(b)中,当要控制序号信号灯L0时,控制数据需送至74HC595的Q0端,Q0端输出高低电平使信号灯L0熄灭或点亮。当检测信号灯L0时,在Q0端和Q1端分别输入00B、01B、10B和11B等4种逻辑值,然后读回D0、D1端的输出的逻辑值,4种D0、D1端逻辑值由低位至高位组合为一个字节,构成设备状态值。如图3(c)所示,信号灯在每个故障状态对应的设备状态值不一样,通过设备状态值,就可以判断信号灯的故障状态。其余灯位的信号灯的控制方法类似,序号为x的信号灯由Q2x、Q2x+1、D2x、D2x+1管理。
3 道岔驱动及故障检测
转辙机使用推拉式电磁铁,电磁铁的磁性对道岔有锁紧功能。一张道岔驱动和检测卡可以管理4个道岔,板卡间采用SPI总线,道岔驱动数据由74HC595的并行端口输出,采集数据和故障数据送至74HC165并行端口。图4为一组道岔的控制和检测电路,道岔驱动的信号为74HC595的Q0脚,通过组合逻辑电路控制,可使L293D驱动转辙机线圈电流正向、反向或无电流,使道岔搬动到定位或反位位置[10-12]。
道岔的检测采用非接触式光电开关,正反位各装一个。道岔搬动时,带动道岔连接机构,当道岔联结机构可靠到达定位(反位)检测装置一侧时,检测器就会输出定(反)位脉冲信号。定位(反)位检测电路首先采用反相器40106和电阻、电容构成TTL反相RC振荡器,输出方波信号驱动红外发光二极管。设置不同的定(反)位检测电路电阻值,可以产生不同频率的脉冲,通过频率来区别定位和反位脉冲的输入。红外接收二极管接收到信号后,将信号调理输出至MCU进行识别,识别后的道岔状态通过74HC165的D0端回送至主控制卡。

图4 道岔驱动及检测电路
采用直流电源驱动转辙机线圈。由于线圈阻抗小,为避免烧毁线圈或驱动芯片L293D,转辙机不能长时间通电。保护MCU是通过比对控制数据和检测到的数据来识别道岔是否到位,通过切断对转辙机线圈供电达到保护目的,同时将检测数据和故障数据通过74HC165的D1端回送至主控制卡。
4 控制系统故障设置及测试
一个沙盘可能有多条线路,一条线路可以有多个控制系统,联锁主机采用RS-485连接各个控制系统。每个控制系统由主控制卡、信号灯驱动及检测卡、道岔驱动及检测卡组成,均安装在一个控制箱内,可以控制一个车站或相邻的几个车站。采用SPI总线级联,主控制卡负责通信和输出控制信号、读回检测数据;信号灯驱动及检测卡负责管理信号机、发车表示器和紧急停车按键;道岔驱动及检测卡负责管理道岔。
控制系统可设置的故障点比较多,有信号灯故障、道岔故障、通信故障、发车表示器故障等。由于信号设备比较多,所反映出的故障现象也很多,可以设置不同难易程度的典型故障案例来达到训练学生的目的。此外,要对不同专业的学生设置不同训练内容,例如针对信号控制专业学生设置现场故障识别、故障排除的训练内容;针对运输专业学生设置对突发事件的应急处理和指挥的内容。
通过控制和检测沙盘上的信号设备,可真实地反映城市轨道交通运营软件各个环节的功能,可以培养学生快速掌握轨道交通运营各个环节的管理技能,也可以验证联锁部分的逻辑关系。图5是城市轨道交通某线路的运营软件和沙盘上机车同步运行的运行图,该控制系统可供多组学生在同一线路学习和实践[13]。

图5 城市轨道交通运营仿真
5 结论
城市轨道交通仿真实验室能仿真城市轨道交通运营中难以发生的各类非正常工况,对各专业学生进行针对性训练。对于信号专业学生,可以训练学生联锁逻辑关系、各层级系统信号控制、通信、设备故障识别和处理等相关内容;对运营管理专业,可进行运营协调与应急指挥中心、控制中心、车站、列车、车辆段等岗位基于各种正常和非正常情况下的纵向、横向联动训练。本控制系统自主研发、先易后难、逐步完善,更侧重于实训,是铁路运输、铁路信号等专业实验室建设的重要组成部分。
References)
[1] 翟旭.城市轨道交通实验室模拟机车控制系统设计[D].成都:电子科技大学,2013.
[2] 邬芝权.铁路信号仿真实验室的硬件系统设计及其信号机程序测试[D].成都:西南交通大学,2011.
[3] 王顺利,孙景冬,王淑伟.铁路运输管控一体实验平台设计与研究[J].实验技术与管理,2013,20(8):97-100.
[4] 许晓伟.城市轨道交通列车运营仿真系统研究[D].上海:上海工程技术大学,2013.
[5] 邢红霞.城市轨道交通列车自动控制系统实验室建设方案[J].城市轨道交通研究,2011(9):76-78.
[6] 翟国锐.轨道交通实验控制系统的研究[D].北京:北京交通大学,2008.
[7] 盖建男.CTC联锁仿真系统的设计与实现[D].北京:北京交通大学,2013.
[8] 叶敬贤.轨道交通联锁实验系统的研究[D].北京:北京交通大学,2009.
[9] 李一龙.计算机联锁技术培训模式的研究[J].中国铁路,2008(5):53-56.
[10] 叶华平,翁瑶,胡彦.基于沙盘的轨道交通车站设备监控仿真培训系统[J].城市轨道交通研究,2011(10):64-66,74.
[11] 杨昭军.车站信号车务仿真培训硬件系统的设计与实现[D].北京:北京交通大学,2008.
[12] 李绍斌,蒋大明.铁路运输沙盘综合演练联锁系统的设计和实现[J].中国铁路,2005(6):39-40.
[13] 谢飞,杨扬.基于沙盘的城轨控制实验室集中站联锁仿真系统[J].铁路计算机应用,2014(9):51-55.
Design of control system of urban rail simulation platform based on fault detection
Wu Zhiquan, Zhai Xu, Jin Wei
(Department of computer & Communication Engineering,South west Jiaotong University (Emei campus),Emei 614202,China)
The sand table control system to monitor the state of the signal equipment is designed. The experimental environment of urban rail transit operation abnormal-working is built by setting some faults. The project adopts some tools such as Visio,Altium Designer and keil uvision4 to design the signal driver and detection circuit,turnout drive circuit and detection circuit,and provides the communication interface for the interlocking host. The interlocking host not only controls the signal equipment on the sand table,but also detects the status of the signal equipment,and achieves the detection of the faults. After the system is built,the students’ abilities such as fault treatment,emergency handling and pre-project implementation are trained by setting the fault points; therefore,it can provide services for teaching,training and scientific research for colleges and universities,railway bureau training units and research departments.
urban rail; simulation platform; fault simulation; control system
2014- 11- 20
教育部春晖计划科研合作项目(22014044)
邬芝权(1976—),男,四川隆昌,工学硕士,实验师,系副主任,主要研究方向为嵌入式控制.
E-mail:jsjxwzq@126.com
TN79+1: G424.1
A
1002-4956(2015)6- 0106- 04
