基于Ansys的捷联惯导被动减振研究
2015-03-27中北大学
中北大学 穆 翔 郑 宾 李 彬
1 捷联惯导系统模型建立与仿真分析
根据某装备内部捷联惯导系统,通过SolidWor ks软件建立与捷联惯导系统等效的三维实体模型,机械结构安装示意图如图1所示。

图1 某装备内部捷联惯导系统安装组件


将四种各波形稳定后的峰值取出,如表1所示。
2 捷联惯导被动减振系统设计
2.1 被动减振系统设计要求
由于捷联式惯性导航系统中的许多器件都为高精度器件,因此要在有效控制振动的同时不能额外引入附加的角振动和线振动,这有这样才能真正意义上满足捷联式惯性导航系统高精度的减振设计要求。同时还应该满足以下的要求:成本低,经济合理;通过合理布置阻尼器件的位置,尽可能的减小振动的耦合;捷联式惯性导航系统减振后的最大振幅满足设计要求[6]。

表1 四种不同频率正弦载荷下质心处Y方向最大位移
通过以上设计要求的分析,减振系统的原理图如图2所示,最终实现保护捷联惯导系统的目的[7]。

图2 被动减振系统原理图
2.2 捷联惯导被动减振系统简化模型
由于无论是捷联惯组还是安装支架的刚度和质量相对于阻尼减振器都大很多,而且捷联惯组的固有频率也远高于简谐激励频率,因此在对捷联惯导被动减振系统进行建模分析时,做出以下假设:
1)安装支架和捷联惯组均视为刚体,只做单方向往复运动;
2)阻尼减振器件本身的质量可忽略不计,且阻尼减振器件自身是定常线性系统,即其阻尼力与速度、弹性力与位移成正比;
3)捷联惯导系统的质心位于其几何中心;
4)所有振动引起的位移均视为小位移。
基于以上的四个假设,可以把单自由度振动系统理解成单自由度刚体弹性支撑系统,其系统模型图如图3所示。
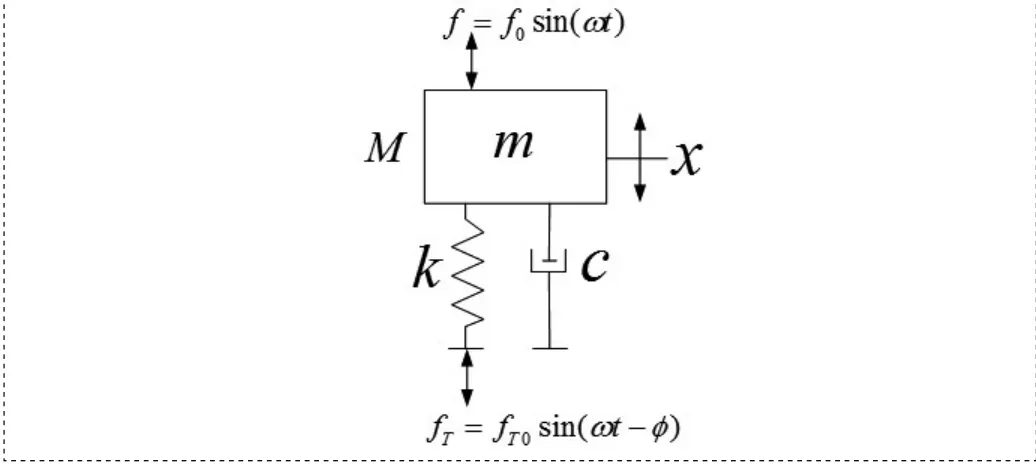
图3 单自由度刚体的弹性支撑系统模型图
该系统的动力学方程为:

解方程式(3.1)可以得到传递到结构体的力的幅值同干扰力的幅值 之比, 为力的传递率或者称为振动传递率T。其表达式为:

3 捷联惯导被动减振系统仿真分析
在ANSYS软件中对捷联惯导被动减振模型进行模态分析,得到捷联惯组被动减振系统的前四阶模态,将捷联惯组被动减振系统的前四阶模态与捷联惯导系统等效模型前四阶模态进行分析对比,如表2所示。

表2 捷联惯导模型与被动减振模型前四阶模态对比

各波形稳定后的峰值取出,同捷联惯导系统施加前四阶模态频率的正弦载荷的质心Y方向位移进行比较,在捷联惯导系统与被动减振系统一阶共振频率处,捷联惯导系统在加入被动阻尼减振器件后,在系统振动的过程中吸收了部分振动能量,使得捷联惯导系统模型质心处Y方向的振幅有所减小,最大幅值的减振幅度约为10.7%。在捷联惯导系统与被动减振系统二、三、四阶共振频率处,捷联惯导系统在加入被动阻尼减振器件后,使得捷联惯导系统模型质心处Y方向的振幅分别减小约为15.4%、16.8%、20.2%。
4 结论
根据仿真分析设计了合理的被动减振系统,对不同阻尼减振元件进行了形状、位置及厚度的优化,对捷联惯导被动减振系统建立三维模型,对其进行模态分析和正弦载荷加载分析,得出结论为被动阻尼减振器件对捷联惯导系统等效模型有明显减振效果,最大振幅的减振幅度在20.2%。
[1]庹州慧,胡德文,李如华,魏建仓.捷联惯导系统减振设计[J].中国惯性技术学报,2009,17(6):648-650.
[2]李晓峰.捷联惯导和组合导航的仿真研究[D].西安电子科技大学,2010.
[3]陈霞.天文/惯性组合导航模式研究[J].光学与光电技术,2003,03:21-25.
[4]张琳,邓长华,谭永华,李锋,何泽夏.随机振动试验仿真技术研究[J].机械强度,2011,06:927-931.
[5]卢德君.结构振动主被动控制实验研究[D].哈尔滨工业大学,2006.
[6]廖斌.光纤陀螺捷联惯导系统改进算法研究[D].哈尔滨工程大学,2011.
[7]袁军锋.捷联惯导系统振动控制技术研究[D].中北大学,2014.