磁悬浮系统气隙磁场检测方法研究
2015-03-26叶凌云黄添添牟文杰
罗 云,叶凌云,黄添添,牟文杰
(浙江大学 生物医学工程与仪器科学学院,浙江 杭州310027)
0 引 言
磁悬浮技术是一种先进的支撑技术,具有无摩擦、无需润滑、功耗低、清洁无污染等[1~3]其他支撑技术所无法比拟的优势。目前,磁悬浮技术已在磁悬浮列车、磁悬浮轴承等磁悬浮系统中有较多的应用。磁悬浮系统通常利用电磁铁实现悬浮体(被悬浮对象)的悬浮控制,电磁铁与悬浮体之间的电磁力大小与两者之间的磁场气隙密切相关[1],能否实现该磁场气隙的高精度检测对电磁力的精确计算和对悬浮控制的性能有着重要的意义。文献[4]提出高速磁悬浮列车中气隙磁场的分布和变化规律对列车的悬浮系统、导向系统、推进系统的设计和控制以及改进、优化列车参数有着重要的指导意义。文献[5]指出磁悬浮轴承绕组间气隙磁场对悬浮性能有影响,如何准确获取两套绕组气隙磁场各自的分布情况成了磁悬浮轴承中实现悬浮控制的关键问题。因此,设法解决磁悬浮系统气隙磁场的高精度检测问题显得很有必要。
在磁悬浮系统气隙磁场检测中,国内外常用的方法有霍尔效应法、感应线圈法。感应线圈法在进行磁场测量时,必须使通过探测线圈的磁通量发生变化,需要复杂的机械动作,而且感应电势要经过积分器积分输出,这里势必存在累积积分漂移问题,测量精度受影响[6]。霍尔效应法是目前国内外学者最多采用和研究的一种气隙磁场测量方案,由于霍尔片体积小,结构简单,可直接测量霍尔电势,无需积分器,避免了积分漂移现象,测量精度能达到10-3~10-4量级[6]。但目前霍尔元件体积最小只能做到mm 级,对于更狭小气隙磁场的测量没有办法。
本文以磁悬浮系统气隙磁场的检测为研究对象,提出了一种基于隧道型磁阻(TMR)传感器阵列的气隙磁场检测方案,TMR 传感器不仅具备了霍尔磁传感器体积小、结构简单、可直接电压输出无需积分的优点,而且有着更高的灵敏度、较低的噪声输出和相对较宽的测量范围[7]。同时,TMR 传感器本质上是一种薄膜型器件,非常适合于做成传感器阵列,实现多点测量,对于需要全面掌握气隙磁场分布的磁悬浮系统来说,这无疑是理想的解决方案。
1 检测原理
基于TMR 传感器阵列的气隙磁场检测方案中,采用TMR 传感器作为磁传感元件,同时在气隙磁场中进行传感器的多点布控,利用传感器阵列来全面掌握气隙磁场的信息,从而准确得到电磁力的大小和变化。
TMR 传感器是利用TMR 效应来实现磁传感作用的一类高灵敏度磁传感元件。在体积方面,TMR 传感器由磁性薄膜和非磁性薄膜的混合材料制成的薄膜型器件,厚度可以做到μm 级,尺寸上满足狭小气隙磁场的测量需求。在灵敏度和精度方面,TMR 传感器超过传统磁传感器(包括霍尔磁传感器、异性磁阻传感器等)至少1 个数量级。TMR不但能测磁场大小,还能检测磁场方向,能够检测出磁场极性正是系统所要求的。
本方案中选择Micro Magnetics 公司的STJ 系列产品,其测量范围为±50 Oe,测量精度为5nT。
2 方案设计
为降低设计的复杂度,设计了基于单TMR 传感器的气隙磁场检测系统,系统总体框图如图1 所示,包括标准磁场产生装置(基于亥姆霍兹线圈),传感器电路、信号调理电路、控制采集系统和上位机。
系统设计了一个亥姆霍兹线圈作为磁场产生装置,磁场大小由恒流源电流控制。
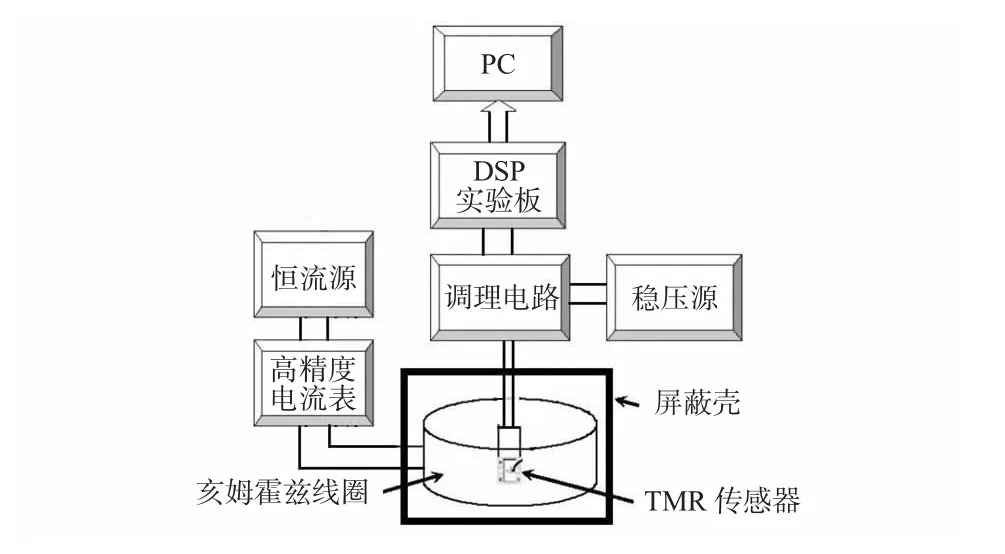
图1 基于TMR 传感器的气隙磁场检测系统的总体框图Fig 1 Overall block diagram of air-gap magnetic field detecting system based on TMR sensor
磁传感元件采用Micro Magnetics 的STJ—340 的TMR全桥传感器,TMR传感器置于亥姆霍兹线圈中心,检测磁场。传感器电路就是为全桥提供低噪声稳压供电。系统采用低噪声线性稳压芯片LT3032 提供±2.5 V 供电电压,+2.5 V电压输出噪声仅为20 μV,-2.5 V 电压输出噪声仅为30 μV。传感器输出信号经调理电路放大和滤波,最终调理到AD 可采样的范围内。放大电路采用TI 的INA118仪用放大器,滤波器采用2 个相同的二阶巴特沃斯低通滤波器组成,低通滤波器截止频率设为100 Hz。经过滤波后的信号最后传输至DSP 实验板上的高精度A/D 转换器,DSP 实验板控制AD 采样,并将数据传送到上位机。上位机采用Matlab 编程实现数据处理和分析,最终获得TMR传感器输出电压与施加磁场激励的关系曲线。
2.1 亥姆霍兹线圈设计
当所需产生的磁场不太强时,使用亥姆霍兹线圈是比较方便的。亥姆霍兹线圈的设计需要确定5 个参数,它们分别为漆包线外径D、轴向线线圈匝数M、径向线圈匝数N、最内层线圈的半径R0和两组线圈之间的间距L0,如图2所示。确定这5 个参数就可以唯一地确定一个亥姆霍兹线圈。
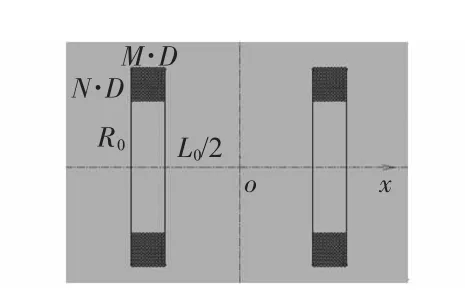
图2 亥姆霍兹线圈特征参数Fig 2 Characteristic parameters of Helmholtz coil
确定这5 个参数后,可进一步推导出
取R0=15 mm,D=0.5 mm,M=25,N=25,用Mathcad计算可得,当L0=10 mm 时,线圈间的磁场均匀性最好,所设计的亥姆霍兹线圈中心最大磁感应强度为25 Gs,均匀区长度为5.2 mm,最大非均匀度为6×10-5。用Solidworks 绘制的亥姆霍兹线圈如图3 所示。
2.2 电磁兼容设计
为了提供一个可靠的测试环境,必须对整个测试系统进行磁屏蔽。对于地磁场和低频磁场都要用高磁导率的铁磁材料来屏蔽,且磁导率越高,屏蔽层越厚,屏蔽效果越好。
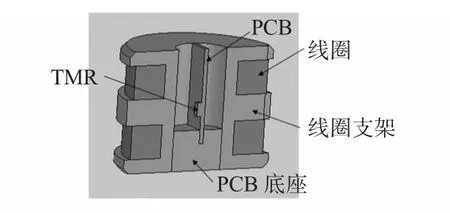
图3 亥姆霍兹线圈剖视图Fig 3 Sectional view of Helmholtz coil
屏蔽的效果取决于屏蔽材料和屏蔽体的结构。屏蔽材料选择低碳钢,相对磁导率μr≈1 000。最终的屏蔽壳结构如图4 所示。
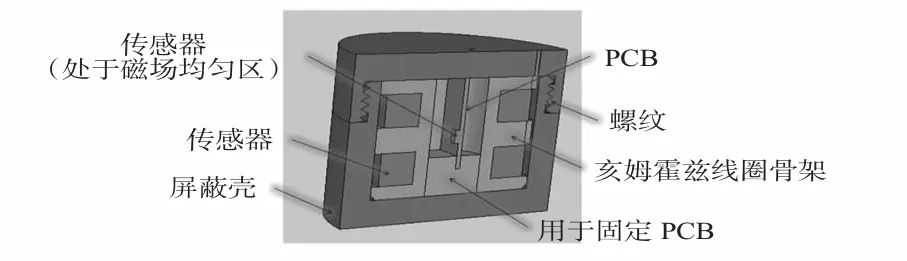
图4 屏蔽壳剖面图Fig 4 Sectional view of shielding shell
3 实验与数据处理
测试在磁屏蔽房中完成,室内温度保持在25 ℃左右。调节流过亥姆霍兹线圈的电流,使电流从0 开始,逐渐增大至50 mA,间隔为1 mA;又从50 mA 逐渐降低至-50 mA;最后逐渐增大至50 mA。用列向量V 表示每个电流值对应得电压值,同时将电流值折算成磁感应强度值,将得到向量M。M 和V 都是251 个元素的列向量,用Malab 作出V 和M 的关系图,如图5 所示。
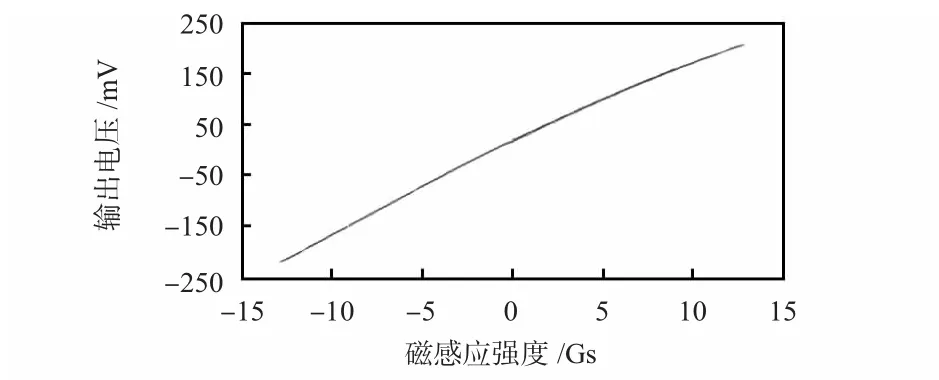
图5 TMR 输出电压与施加磁场的关系图Fig 5 Diagram of relationship between TMR output voltage and exerted magnetic field
对数据进行进一步分析,采用最小二乘法来拟合。考虑以X 的线性函数a+bX 来近似表示Y。以均方误差σ2=E[(Y-(a+bX)2]来衡量以a+bX 近似表示Y 的好坏程度。σ2的值越小,表示a+bX 与Y 的近似程度越好。这样,将σ2分别关于a,b 求偏导数,并令它们等于0,解得系数a,b 的值
用Matlab 来实现计算,可得拟合曲线方程为:y=16.753 9x+8.252 3,如图6 所示。原始曲线与拟合曲线之间的误差如图7 所示。
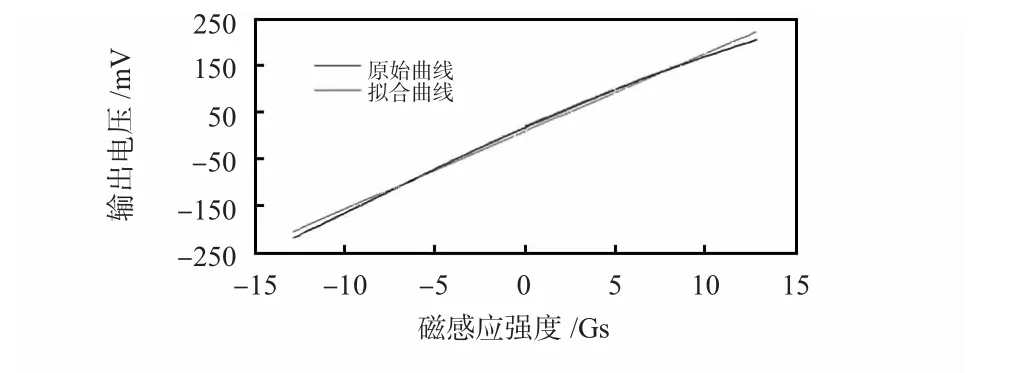
图6 最小二乘法拟合直线Fig 6 Fitting curve of least square method
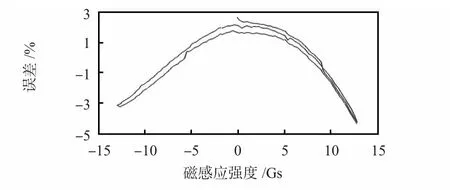
图7 误差曲线Fig 7 Error curve
由误差曲线图可以得出,TMR 的最大非线性误差为δL≈4.3%。
由于TMR 传感器的零点偏移和非线性误差属于系统误差,系统误差由于知道其规律,通过补偿的方法可以进行修正[8]。而随机误差无法修正,因此,随机误差决定了测量系统所能达到的精度。而磁滞占了随机误差的绝大部分,所以,影响测量精度的主要是磁滞。如果采取补偿方法后,影响测量精度的因素主要是磁滞,最理想的情况,测量不确定可以达到±0.5%FS。
4 结 论
基于TMR 传感器阵列的气隙磁场检测方案为磁悬浮系统的气隙磁场检测提供了新的途径和方法。基于该方案研制的实验系统取得了比较好的磁场检测结果,实验测试发现,影响磁场测量精度的主要因素是磁滞,要想进一步提高磁场的检测精度,必须设法消除磁传感器的磁滞影响。
[1] 曹广忠,潘剑飞,黄苏丹,等.磁悬浮系统控制算法及实现[M].北京:清华大学出版社,2013.
[2] 胡业发,周祖德,江征风.磁力轴承的基础理论与应用[M].北京:机械工业出版社,2006:3.
[3] 练 斌,叶凌云,黄添添,等.磁悬浮式加速度计前期研究[J].传感器与微系统,2012,31(7):70-72.
[4] 田武刚,潘孟春,罗飞路,等.高速磁悬浮列车磁场测量系统的设计[J].仪表技术与传感器,2004(4):15-17.
[5] 王晓林,林盈杰,邓智泉,等.基于探测线圈的无轴承异步电机气隙磁场测量方法研究[J].中国电机工程学报,2004,24(10):109-114.
[6] 王国安,阎和平.霍尔元件特性的研究及其在加速器磁场测量中的应用[J].中国科学技术大学学报,1982,12(4):124-132.
[7] Ripka P,Janosek M.Advances in magnetic field sensors[J].Sensors Journal,IEEE,2010,10(6):1108-1116.
[8] Bernieri A,Ferrigno L,Laracca M,et al.Improving GMR magnetometer sensor uncertainty by implementing an automatic procedure for calibration and adjustment[C]∥Proceedings of Instrumentation and Measurement Technology Conference,IMTC 2007,IEEE,2007.
