基于达芬奇技术的多路视频采集系统开发
2015-03-25谷庆广罗文广于静美广西科技大学电气与信息工程学院广西柳州545006北京工业大学环境与能源工程学院北京000
谷庆广,罗文广,于静美(.广西科技大学电气与信息工程学院,广西柳州 545006; .北京工业大学环境与能源工程学院,北京 000)
基于达芬奇技术的多路视频采集系统开发
谷庆广1,罗文广1,于静美2
(1.广西科技大学电气与信息工程学院,广西柳州545006; 2.北京工业大学环境与能源工程学院,北京100022)
摘要:设计一种基于达芬奇技术的多路视频采集系统。根据图像采集系统的工作原理,开发4路视频采集模块、1路视频输出模块与通信接口模块,该硬件系统可实现视频图像的采集和数据传送;设计多路视频软件处理系统,可实现视频图像数据的处理,并将处理后的数据信号送往显示屏显示。经过长时间测试运行,该多路视频采集系统具有较强的数字信号处理能力,系统运行稳定,具有较强的实用性。
关键词:达芬奇技术; 4路视频采集;视频图像处理;数字信号
随着汽车工业的高速发展和人们对汽车性能要求的提高,目前各种高新电子技术在汽车上得到广泛应用,民众的汽车拥有量进一步增加[1]。我国虽然已经基本建成了四通八达的现代化国家道路网,但随着汽车数量的增加,路网通过能力满足不了交通量增长的需要,交通拥挤和阻塞现象日趋严重[2]。越来越多的机动车辆在停车场、公路、街道、车库等狭窄、拥挤的地方倒车时,驾驶员稍微不小心就会发生碰撞事故[3],因此各种汽车驾驶辅助系统应运而生。
车辆视觉辅助系统,即在车辆周围安装摄像头,获得车辆周围的路况图像信息,驾驶员可以通过安装在车辆内部的显示屏幕观察到汽车周围的环境[4],从而减少交通事故。该系统主要由智能高清摄像头、传输模块、视频处理器组成。通过安装在车辆四周的摄像头对路况信息进行采集,再利用视频图像处理技术将视频图像拟合成一幅视频画面送往液晶屏显示。这样汽车驾驶员在车内就能通过显示屏完整的看到车辆周围的路况信息,没有任何的死角。因此,开发扩展性很强的多路视频采集系统,对于驾驶员安全驾驶车辆具有重要的意义。
1 视频采集系统的组成及工作原理
4路视频硬件采集系统总体框图如图1所示。主要包括4个感光耦合摄像头(Charge Coupled Device,CCD)、4路视频输入解码电路、外部存储模块、通信模块电路、电源管理电路及显示屏驱动电路[5]。

图1 硬件系统总体设计框图
安装在智能车辆上的4路CCD高清摄像头同时采集车辆周围路况场景的视频图像信息,并将视频图像信号转换成模拟视频信号。通过视频电缆线将模拟视频信号送给视频解码芯片TVP5150转换成数字视频信号[6],并将转换后的数字信号送至TMS320DM6437视频处理前端进行数据处理。应用程序接受到一个完整的视频帧以后,将信号传送到视频处理后端VPBE,VPBE将此数字视频信号通过MPEG-4标准编码压缩,TMS320DM6437系统将编码后的信号转换成模拟视频信号,并经驱动芯片OPA361放大后通过视频电缆输出,最终将放大后的视频信号送给显示屏显示。
4路视频系统能以直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,帮助驾驶员扫除视野死角和视线模糊的缺陷,提高驾驶的安全性。
2 硬件系统设计
2.1达芬奇技术
达芬奇技术是一项新型数字化技术,突破了传统视频方案的限制,提供包含数字视频评估模块在内的一整套软件系统、开发工具等部件,具有灵活、高性能、低成本优势,缩短了软件代码的开发周期。
2.2核心DM6437模块
TMS320DM6437是一种功耗低、功能性强、资源丰富,并能针对较高性能系统进行复杂及快速运算的视频处理芯片[7],该芯片是基于达芬奇技术的32位处理器,时钟频率可达600 MHz,支持8个8位或4个16位并行MAC运算,峰值处理能力高达5 600 MIPS[8]。多路视频采集系统由DM6437处理器及其外围电路组成,DM6437具有丰富的外围辅助扩展接口,处理器外围可扩展4路视频输入和1路视频输出接口,可以方便的实现与外部视频输入端口无缝连接、视频编码芯片数据转换以及显示设备显示;串行通信接口支持半双工或全双工的10/100 Mb/s传输速率,同时它还提供硬件流控制[7]。完善的通信接口,可以实现数据处理与通信功能。
DM6437运行过程中,只能识别数字信号,而摄像头采集的信号为模拟信号,在系统设计过程中,需要对视频前端的信号进行处理。
2.3视频模块
2.3.1视频解码模块
视频解码模块主要是对摄像头采集的模拟视频信号进行处理,将模拟信号转换成DM6437能够识别的数字信号。视频输入解码模块由1个TVP5150型视频解码器及外围辅助电路组成,其功能是将每一路CCD摄像头采集输入的标准PAL制电视模拟信号发送到视频解码器,完成视频图像的箝位及抗混叠滤波等预处理、模拟数字化转换及亮度/色度、水平/垂直同步等信号的分离,将模拟视频信号转换为数字并行信号BT.656码流格式[9]。
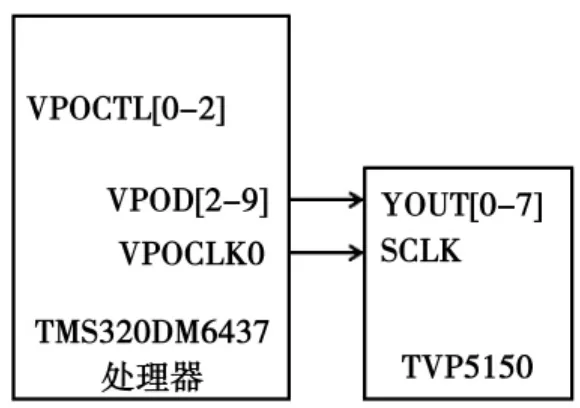
图2 视频解码模块与主处理器连接示意图
TMS320DM6437视频接口VP0/A、VP1/A、VP2/A、VP3/A分别连接1个TVP5150,视频采集的数据输出格式是8位YUV 4∶2∶2或8位ITU-R BT.656与嵌入式同步,分辨率为CIF(352× 288)。视频输入解码模块与主处理器DM6437连接如图2所示。图形视频的色调、对比度、亮度、饱和度及清晰度可以使用I2C串行接口,控制系统将2路电路的I2C总线接口SCL和SDA分别互连,视频解码芯片TVP5150的视频输出口YOUT[0-7]与主处理器DM6437 VPORT口的VPOD[9-2]相连,TVP5150的系统时钟SCLK与DM6437 VPORT口的VPOCLK0相连。由于采用ITU-RBT.656码流格式,图像的水平同步、垂直同步、场同步等同步信号已内嵌在视频数据流中,连接线路只采用了1路VPOCTL[0-2]。
视频解码芯片TVP5150的数据通讯配置是通过I2C标准总线来完成的。I2C标准总线由时钟输入/输出线(SCL)和串行数据输入/输出线(SDA)组成。TVP5150完成数据转换处理任务,配合主处理器DM6437工作。DM6437作为I2C总线的数据主处理器,在初始化TVP5150配置的写操作时,执行的步骤如下:
1) DM6437产生一个起始条件;
2) DM6437发出一个TVP5150的地址(0x5C),并标明写操作,等待TVP5150响应;
3)接收到TVP5150的响应后,DM6437发出要配置的寄存器的地址,等待TVP5150响应;
4)接收到TVP5150的响应后,发送要配置的数据,等待TVP5150响应;
5)接收到TVP5150的响应后,发送停止位,结束一次配置。
处理器DM6437将处理后的视频信号通过输出端口输出,输出的信号比较微弱,需要对信号进行放大处理。
2.3.2视频信号驱动电路
4路摄像头采集车辆周围的视频图像信号,并通过视频电缆,将模拟信号送给视频解码芯片TVP5150完成AD转换功能,并将转换后的数字信号通过电路板线路传送给DM6437的视频处理前端VPFE,处理器程序收到TVP5150的超级帧之后,重新分解合并为1路复合视频信号。合并后的复合视频信号通过电路板线路传送给视频处理后端VPBE,通过VPBE将此数字视频信号编码输出并转换成模拟信号。转换后的模拟信号DAC_IOUT_D通过驱动放大电路和滤波电路,通过视频电缆将最终的复合视频信号送给显示器显示。视频信号驱动电路如图3所示。
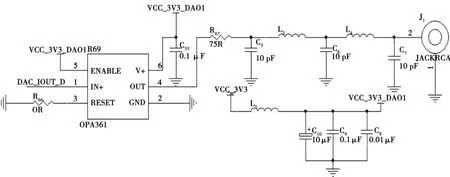
图3 驱动电路
3 软件设计
图像平滑往往会使图像边界、轮廓变得模糊,为了使图像变得更加清晰,在进行软件设计时,需要对视频处理前端处理后的图像进行图像锐化处理[10]。图像的模糊实质就是图像受到平均或积分运算造成的,因此可以对图像进行逆运算如微分运算来使图像清晰化[11]。微分锐化方法有很多种,拉普拉斯锐化法是属于比较常用的一种方法,拉普拉斯运算是偏导数运算的线性组合[12]。
设Δ2f为拉普拉斯算子,则

对于离散数字图像f(i,j),其一阶偏导数为[13]

二阶偏导数为

所以,拉普拉斯算子Δ2f为

对于扩散现象引起的图像模糊,可以进行图像锐化,有[14]

式中g(i,j)为锐化后的图像; kτ为与扩散效应有关的系数,设定该参数时要合理,如果kτ过大,图像轮廓边缘会产生过冲,反之kτ过小,锐化效果会不明显[15]。
如果令kτ=1,则锐化后的图像为

式(1)可以利用系数模板矩阵表示为

由此,拉普拉斯锐化运算就可以完全转换成模板运算,使得运算变得简便。锐化程序流程如图所4示。
进入主程序后,调用构造图像的函数生成图像,然后调用锐化子程序生成检测图,循环5次以后返回到调用图像函数处,重新生成图像。在进入锐化子程序时,首先完成工作变量的初始化,然后针对图像中每一个像素点用拉普拉斯算子进行运算,最后完成图像锐化[16]。

图4 锐化程序流程图
4 试验结果及分析
为验证设计的视频采集系统的性能,开发了图像锐化程序,即拉普拉斯变换程序。图5为黑白图像锐化前的测试结果,图6为黑白图像锐化后的测试结果。

图5 图像锐化前

图6 图像锐化后
由图5的测试结果可知,在进行灰度变换时,程序抓取到视频的逐个像素点,将亮度大于>127的设为全白,其它亮度的设为全黑,显示屏中看到只有黑白2色的图像。由于没有加入相应的运算算法,图像有模糊现象,不是很清晰。
在图5灰度变换的基础上,加入拉普拉斯变换程序,对图像进行锐化处理,得到图6的测试结果,从图6中可以明显观察到锐化处理后的图像变得比较清晰。
5 结论
针对视频采集的需求,介绍了多路视频采集硬件系统的结构,设计了硬件采集系统的核心电路。在此基础上,针对信号布线完整性进行分析,对设计的硬件电路板开发了拉普拉斯锐化处理算法,试验结果表明:
1)基于拉普拉斯变换的程序测试,设计的视频采集硬件系统能够实现视频图像采集、数字信号处理、数字信号传输和数据存储功能,能够应用于车辆行驶过程中路况图像信息采集。
2)结合拉普拉斯变换算法,有效的实现了黑白图像的锐化处理功能,处理后的图像变得清晰可见。
参考文献:
[1]曹凤萍,于明进,何心慧.我国汽车制动电子控制辅助系统性能检测的不足及完善措施[J].山东交通学院学报,2012,20(2) : 12-16.
[2]朱东辉.智能交通系统的发展[J].山东交通学院学报,2002,10(4) : 9-14.
[3]操虹.车载环视显示系统设计[D].合肥:合肥工业大学,2009.
[4]赵凯.全景可视化辅助泊车系统研究[D].合肥:合肥工业大学,2011.
[5]金良,周树道,黄峰,等.基于DM642的实时视频处理系统设计与实现[J].装备制造技术,2008,10(1) : 87-89.
[6]黄勇,蒋工亮,孙联,等.基于图像处理技术的高速公路弯道车速预警系统的研究[J].山东交通学院学报,2009,17(4) : 23-27.
[7]王旭光,管志光,张吉卫.基于DSP与PIC单片机的CAN总线系统[J].山东交通学院学报,2008,16(3) : 83-86.
[8]许俊.基于DSP的视频处理开发平台的硬件设计[D].太原:太原理工大学,2010.
[9]高浩然.数字化摄像经纬仪的研究[D].南京:南京理工大学,2009.
[10]任浩.基于Bayer格式数字图像传感器颜色插值及图像锐化的算法研究[D].杭州:浙江大学,2012.
[11]郭闯.视觉伺服平台视觉跟踪技术的研究[D].天津:河北工业大学,2012.
[12]卢允伟,陈友荣.基于拉普拉斯算法的图像锐化算法研究和实现[J].电脑知识与技术,2009,6(4) : 1513-1515.
[13]张海青.基于FPGA图像处理系统的关键算法研究及硬件实现[D].重庆:重庆大学,2010.
[14]杨晓飞.人脸识别系统研究[D].北京:北京化工大学,2005.
[15]蒋运辉.SAR图像中的道路检测技术研究[D].成都:电子科技大学,2005.
[16]许乐,王兵.图像锐化处理算法及其软硬件实现[J].科海故事博览·科技探索,2012,7(3) : 26-30.
(责任编辑:杨秀红)
Development of Multi-Channel Video System Based on
Da Vinci Technology
GU Qingguang1,LUO Wenguang1,YU Jingmei2
(1.School of Electrical and Electronic Information,Guangxi University Of Technology,Liuzhou 545006,China; 2.College of Environment and Energy Engineering,Beijing University of Technology,Beijing 100022,China)
Abstract:This paper introduces a multi-channel video hardware acquisition system based on Da Vinci technology.Firstly,according to the working principle of image acquisition system,the four-way video hardware acquisition module,one-way video output module and communication interface module are developed,which can realize the transmission of video images and data.Then,the multi-channel video software processing system which can implement the processing of video image data is developed,and the data-processed signal is sent to the display.After a long test,the multi-channel video acquisition system has a better digital processing capability reliability,and practicability.
Key words:Da Vinci technology; four-way video acquisition system; video image processing; digital signal
作者简介:谷庆广(1987—),男,河南许昌人,硕士研究生,主要研究方向为智能控制与智能自动化.
基金项目:广西汽车零部件与整车技术重点实验室基金项目(13-051-38,14-045-44)
收稿日期:2014-10-27
DOI:10.3969/j.issn.1672-0032.2015.01.016
文章编号:1672-0032(2015) 01-0078-05
文献标志码:A
中图分类号:TP317.4
