基于模型仿真技术的PID参数整定优化
2015-03-24邹丽梅钱学毅
郭 波,邹丽梅,钱学毅
GUO Bo, ZOU Li-mei, QIAN Xue-yi
(武夷学院 机电工程学院,武夷山 354300)
0 引言
PID控制通过调节比例P、积分I与微分D三个参数,分别与输出偏差值相乘,其代数和输入系统,从而调节系统输出响应,期望满足快速、准确和稳定的控制需求。PID控制算法历史悠久,简单可靠,参数物理意义明确,控制器容易实现,至今仍在工业控制中占统治地位。PID控制难点在于整定合适的PID参数值,许多场合仍采取人工整定参数的方式。目前许多设备的自动整定功能局限于整定过程的特定条件,且整定效果不够理想。利用智能优化算法实现PID参数的全局寻优是当前自动整定的一个发展方向,算法实现一般以编程模拟PID控制过程,求取误差积分准则的目标函数作为优化目标。
但工业应用中PID控制器种类繁多,控制目标与实现方式千差万别。程序模拟跟踪此控制过程,求取误差建立目标函数的难度较高。因此许多文献资料的算法仅测试最简化PID控制仿真,难以说明实际控制效果。MATLAB Simulink提供了动态建模仿真开发环境,是目前开发实际控制模型的最简单可行的方法。若目标函数程序设计用命令行仿真技术实现,建模过程可替代传统编程工作方法,使优化开发过程更为简便。若模型程序接近实际控制系统,优化的PID参数整定结果就可直接应用于实际工业控制过程。
1 设计PID控制模型
Simulink是一个面向多域仿真并和基于模型设计的框模块图环境,是MATLAB软件的扩展。用户可利用功能块化的模块搭接生成系统模型,不需编程就可完成系统的输入输出仿真,仿真输出值不仅可通过Scope模块(示波器)直接观察,还可输出至MATLAB工作空间中。
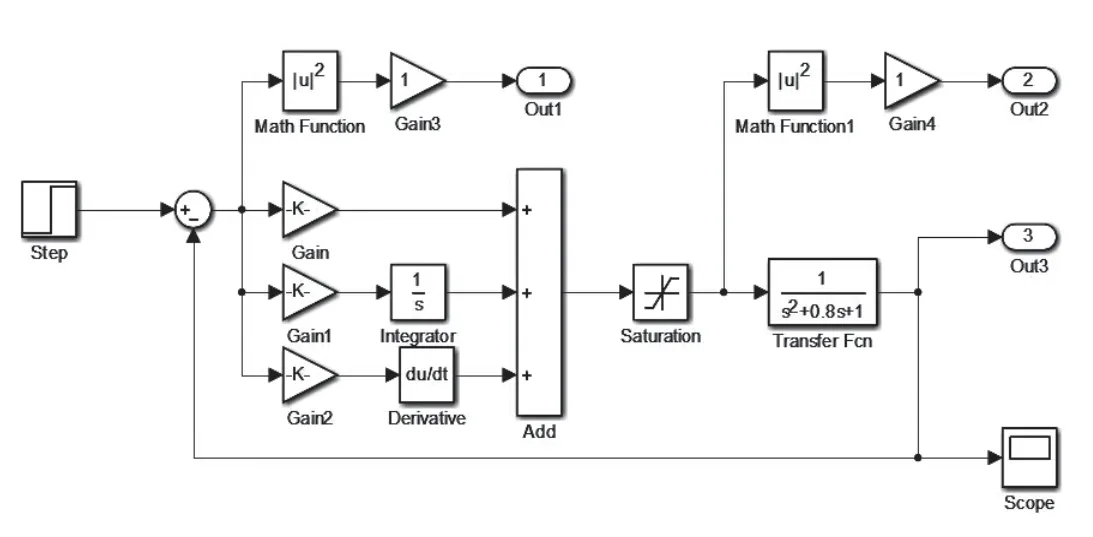
图1 PID控制模型
图中设计三个仿真过程数据输出,其中Out1模块输出系统仿真过程误差值的平方,Out2模块为经过限幅的控制值的平方,Out3模块为系统输出值。
Gain、Gain1、Gain2增益模块设置为PID控制参数整定对象的变量,并声明为MATLAB全局变量,便可接受多个M程序的数值调用。优化算法的优化对象即是此变量组成的向量。
实际控制系统虽然远比以上算例复杂,但实现模型中若干个参数的寻优原理是相同的,相对MATLAB自带的优化工具箱,该方法的寻优算法可根据需要选择。方法实现核心在于应用MATLAB的命令行仿真技术。
2 命令行仿真建立优化目标函数
2.1 命令行仿真函数
大多数控制算法与优化算法都需要目标函数比较控制优化效果,在MATLAB中通常用M文件编写。MATLAB提供了用于M文件的命令行仿真函数sim(),可实现在程序中调用模型动态仿真,其命令格式为:

参数model为仿真的模型文件名称,timespan为设置系统仿真的时间范围,可单设终止时间tFinal,也可设置起始时间、终止时间与时间间隔,如仿真时间20秒,仿真间隔0.01秒,仿真模型名为pid的命令为:

仿真间隔决定仿真耗费的时间与函数值计算工作量,但较大的时间间隔可能影响到优化结果的准确性。PID参数寻优过程可能使仿真产生大量过零,引起Simulink错误停止仿真,因此需要在Simulink参数选项中关闭过零错误。
输出矩阵t为仿真时间向量,x为仿真中间状态矩阵,按先连续状态后离散状态输出过程中间值,y为仿真输出矩阵,当模型有Out1至Out3的三个输出,y即为三列输出。对图1PID控制模型仿真后,y输出矩阵的第一列y(:,1)输出误差平方,第二列y(:,2)输出控制值平方,第三列y(:,3)输出系统输出值,目标函数所需数据可采用类似方式设置输出。
2.2 PID参数整定多目标函数设计
目标函数程序一般定义为M函数文件,方便在优化算法的M脚本文件中调用。PID优化向量在仿真前必须做全局变量声明。命令行仿真所获得的输出矩阵y提供了求取性能指标所需数据。
PID控制系统目标是使输出值y(:,3)的变化过程与期望过程尽量接近。系统的阶跃响应要接近输入的阶跃过程,按照不同的控制品质需求,有超调量、稳态误差、调节时间等多目标值。
许多技术文献将误差积分准则设置为优化目标函数。常见的有平方误差积分准则,缩写为ISE,准则形式为其中e(t)为实际输出或主反馈信号之间的偏差,目标函数可通过累加y(:,1)实现。
不同的准则提供不同的目标函数性能,基于ISE的性能着重于抑制过渡过程中的大偏差的出现,基于ISTE的性能指标在控制大偏差的同时还可缩短调节时间。但是任何误差积分准则均有局限性,不可能完全适应多样的实际控制需求。
经过反复PID参数优化比较,将组成误差积分准则的多个目标,如偏差e(t)、时间t、控制值y(:,2)、输出值y(:,3)、超调量、稳态误差等仿真结果组合构成单一目标函数适应度值。当偏差与控制值取100至0.01数量比值,输出值超调作为惩罚项,分别五次优化的取最优控制输出结果比较如图2所示。
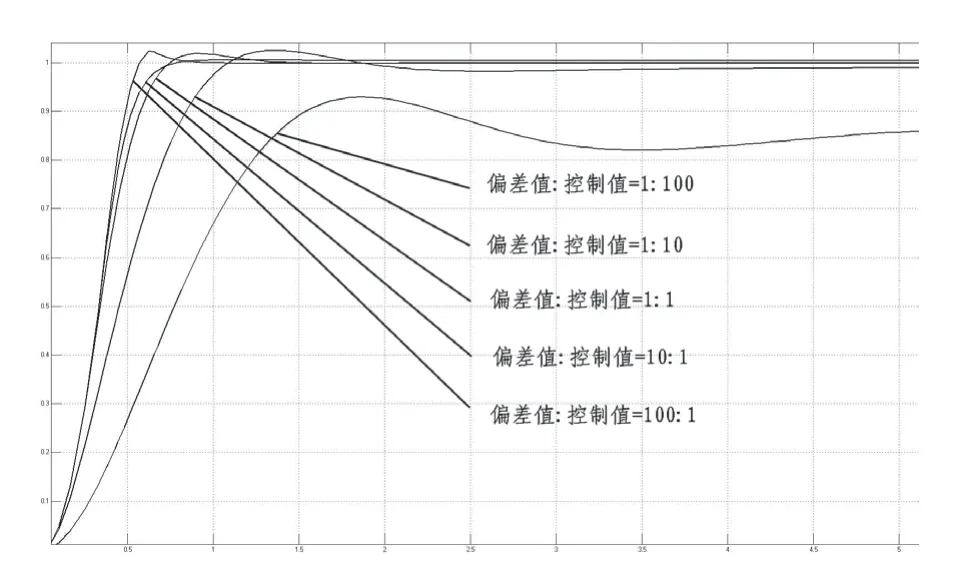
图2 权重数量级寻优结果对比
从结果曲线可看出,控制值决定系统的输入量改变与速度变化,实际系统的控制量不可能无限大,较小的控制量影响着系统能耗,控制值权重最大的曲线响应缓慢,稳态误差大。偏差值是最主要的指标量,决定了输出过程信号与期望过程的接近程度,偏差值权重最大的曲线出现了较陡的超调,以偏差为指标的优化结果将趋向高比例增益,强震荡的控制输出,反而有害。时间t与偏差e(t)相乘,可扩大稳态精度的影响。对优化过程比较分析,优化算法仅能根据适应度最小值使优化目标收敛,多目标误差积分准则影响着控制曲线的不同特性,当追求均衡的控制效果,必须设置数值为均衡的多目标误差积分,多目标权重比在10倍以内,即是使其累计数值处于同一数量级上下,PID控制曲线则可获得较满意的控制品质。
3 粒子群优化算法整定PID参数结果
粒子群优化算法(particle swarm optimization, PSO)是近年发展出的群智能优化算法,利用鸟群生物原理,模拟鸟群觅食的社会行为,基于迭代进行优化。MATLAB实现粒子群算法整定PID参数具体流程如下:
1)建立如图1的Simulink PID控制模型。
2)建立M函数文件fitness作为粒子群适应度函数。函数在命令行仿真后,设定目标函数为累加输出误差平方y(:,1)×权重值,累加控制值y(:,2)×权重值,累加输出值y(:,3)惩罚项。
3)初始化粒子群规模N=40,在可行域随机产生每一粒子的位置Xi和速度Vi,取权重初值为1,计算每一粒子适应度,初始化每个粒子个体极值Pi与全局极值Pg。计算极值粒子偏差值与控制值数量级,更改权重值调整至两者数量级相同。
4)迭代群体所有粒子,按照下面公式更新粒子的速度Vi和位置Xi。
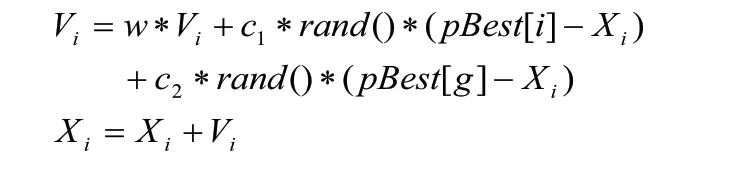
其中c1、c2为常数,称为学习因子;rand ()是[0,1]上的随机数;w是惯性权重(inertia weight);pBest[i]为对应个体极值的粒子位置,pBest[g]为对应全局极值的粒子位置。
5)对更新后的粒子计算适应度,与粒子个体极值比较,若优于个体极值则替代最优个体位置,并更新个体极值。与粒子全局极值比较,若优于全局极值则替代全局极值位置,并更新全局极值。
6)当适应度值达到精度要求或迭代次数达到上限,则给出最优结果,否则迭代次数加1,跳回流程4)。
优化执行过程若打开了Simulink模型,则可实时观察优化后的仿真输出,可以明显观察到优化效果。针对图1PID控制模型,以40个粒子迭代100次,反复10次优化获得的PID参数如表1所示,最优的5个控制输出曲线如图3所示。可见整定参数后的PID控制有控制输出曲线调节时间小,超调量小,稳态精度高的特点,优化结果满足工程实践的整定需要。
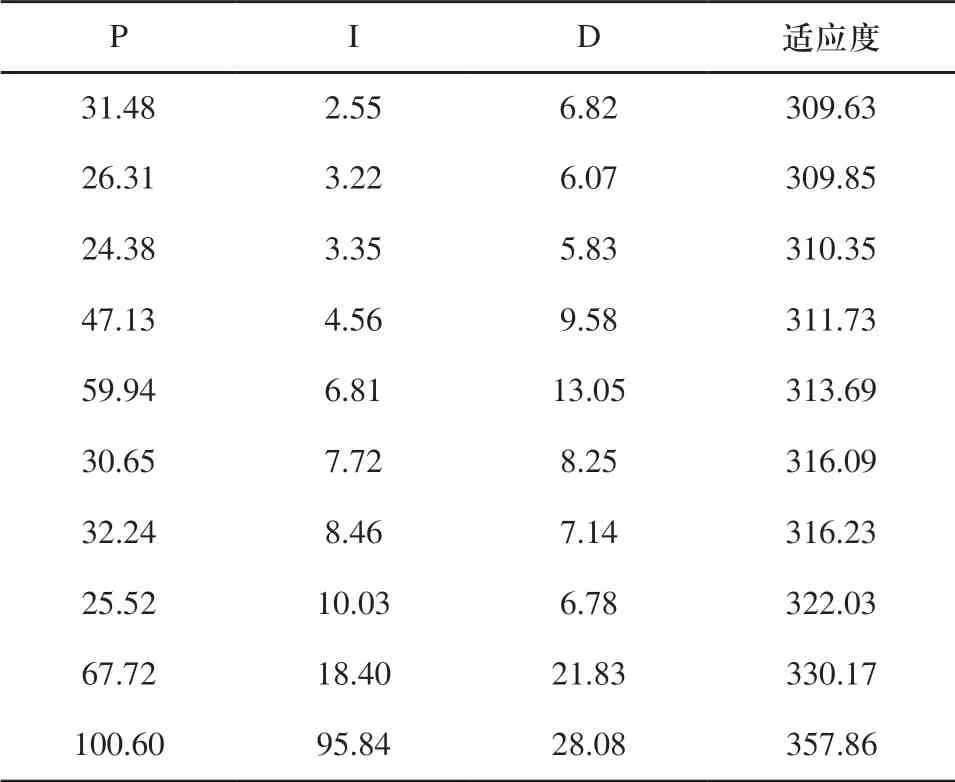
表1 PID控制模型参数整定结果
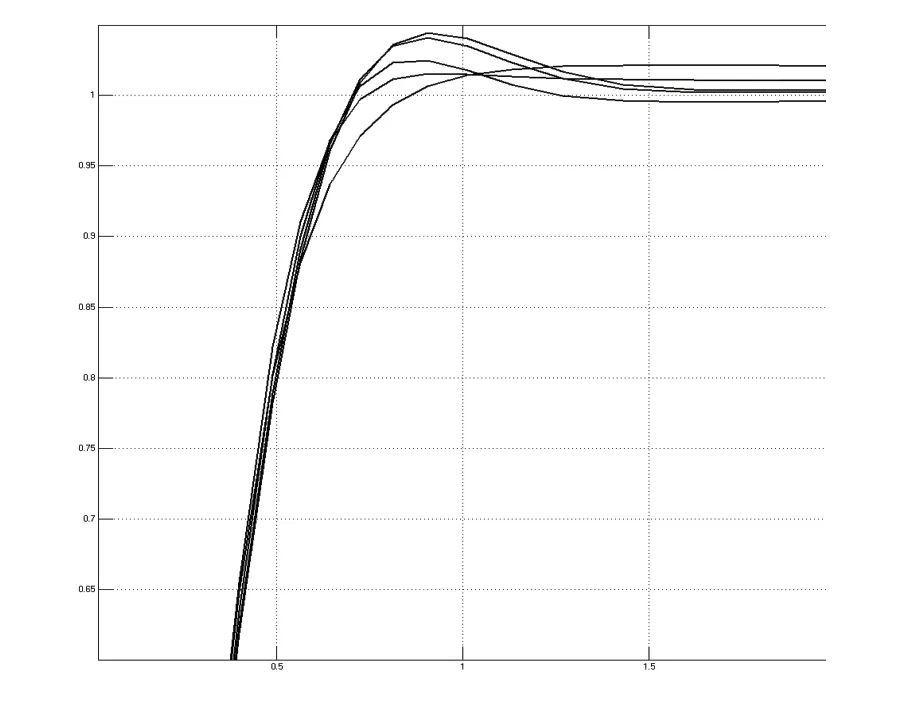
图3 仿真输出示波器结果
4 结论
随着计算机技术进步,仿真速度不断提升,使提取仿真数据,建立目标函数的误差积分准则的方法变得有效。基于模型仿真技术的PID参数整定优化具有简单、通用等特点,优化的重心将建立在模型的准确性与算法的选择上。
比较整定实验与仿真结果,利用优化算法整定PID控制器参数,依赖某一单独误差积分准则为目标函数,难以获得满意的优化结果。根据控制实际,设计误差积分准则构成,提取Simulink模型仿真输出矩阵,构建算法目标函数,通过粒子群优化算法对PID控制参数寻优,是一种有效的计算机辅助离线PID参数整定方法。
[1] 何晋元,周国鹏.用于控制器参数寻优的目标函数研究[J].微计算机信息.2006(07):86-88
[2] 周国鹏,柳学坤,何晋元.基于控制系统优化的ITSE目标函数的研究[J].微计算机信息.2006(22):46-47.
[3] Kennedy J, Eberhart R.Particle swarm optimization[A].IEEE International Conference on Neural Networks: Perth, Australia. Piscataway. NJ: IEEE Service Center[C].1995:1942-1948.
[4] Eberhart R,Kennedy J. A new optimizer using particle swarm theory[A].Roc. Sixth International Symposium on Micro Machine and Human Science: Nagoya, Japan. Piscataway,NJ: IEEE Service Center[C].1995:39-43.
[5] 张利彪.基于粒子群优化算法的研究[D].吉林大学,2004.
[6] 刘道.基于改进粒子群优化算法的PID参数整定研究[D].南华大学,2012.
[7] 李刚,王庆林.基于阶跃跟踪响应的PID控制器性能评价与调节[J].系统仿真学报.2008(14):3763-3766.
