全光纤激光相干测速雷达与外场实验分析
2015-03-23眭晓林曹昌东颜子恒
滕 渊,刘 波,眭晓林,张 颖,曹昌东,颜子恒
(固体激光技术重点实验室,北京100015)
1 引言
在着陆器降落到月球、火星和其他星球上时,需要精确掌握其相对星球的速度,以帮助着陆器在选定地点精确着陆。本文所介绍的全光纤激光相干测速雷达,对激光发射频率进行调制,通过测量本振光与回波光之间的多普勒频移,从而探知着陆器与星球表面的相对速度。对该雷达的性能进行了外场飞行实验,并对实验结果进行分析。该雷达采用全光纤结构,具有体积小、功耗低、测量精度高以及良好的空间适应性等优点。
2 测量原理
激光测速雷达采用频率调制连续波(FMCW)外差相干探测技术[1-2]。在FMCW 外差相干探测技术中,激光输出频率围绕它的中心频率不断变化,激光源的一部分光(本振光)通过光纤耦合进入光电探测器与从目标反射回来的光进行混合干涉。设来自目标反射的激光频率为fr,激光源(本振光)频率为ft,它们到达光探测器阴极表面的光振幅分别为:

式中,A1、A2分别为两束光在光阴极表面处的振幅;分别为两束光的初始相位。两束光在光阴极表面混频,其合成振幅度为:


式中后一项称为多普勒频移fd信号。

由相对论得出多普勒频移fd与物体运动速度V关系为:

式中,λ为激光波长。这就是多普勒测速的基本原理。
在实际方案中,激光器频率调制采用啁啾(chirp)调频方案,激光器频率按水平加三角波的周期规律变化,如图1所示。图中ft为发射激光频率,信号周期为Tm;fr为从目标反射回来的回波频率,变化规律与发射频率相同,但在时间上滞后tR;fb为发射和接收信号的差拍频率。
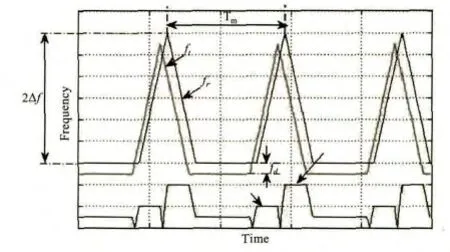
图1 激光发射及接收频率波形Fig.1 Laser transmitting and receiving frequency waveform

式中,fr+,ft+是三角波上升沿的两个频率;fr-,ft-是三角波下降沿的两个频率。根据fb+和fb-的大小来判断速度的正负。
3 系统方案
采用全光纤发射频率调制激光测速法[3-6],由调频激光种子源发出窄线宽调频激光后,其中一束进入光纤放大器,经过放大后分为3束光(R2、R3、R5)。这3束光经过各自的收发开关与光学镜头射向目标。另一束参考光经分束器到达三个探测器作为本地振荡,与接收回波在探测器上混频。探测器输出的信号携带有相对运动速度和距离等信息,数据采集及处理系统对该信号处理后得到着陆器速度、速度极性。激光测速雷达的激光波束指向几何关系如图2所示。
图中R5在着陆的最后阶段标称姿态下应垂直指向月面,R2、R3分布在一个半锥角17度的圆锥上,与圆锥轴线垂直的平面上,R2和R3的投影夹角为120°。R2和 R3相对于“R5与圆锥轴线构成的平面”对称,且R5与圆锥轴线的夹角为 30°。
本书作者佩恩特利用其担任总统首席道德律师的两年半期间,在美国政治中心之一的白宫,近距离地观察到众多的人和事,从而为本书提供了难能可贵的丰富的素材。美国多年来实施了一系列推动行政道德的措施,然而,廉政建设的努力正面临着越来越多的挑战。《打造一个美国应得的政府》针对美国政坛上形形色色的贪腐行为、现存的漏洞,以及原因所在,进行了深入的分析,并作出了不少有益、中肯的批评。与此同时,该书也对如何改变现状提出了一些建议。作者希望,这些建议的落实,将有助于改进美国的行政道德,有助于打造一个美国人民应得的廉洁的政府。
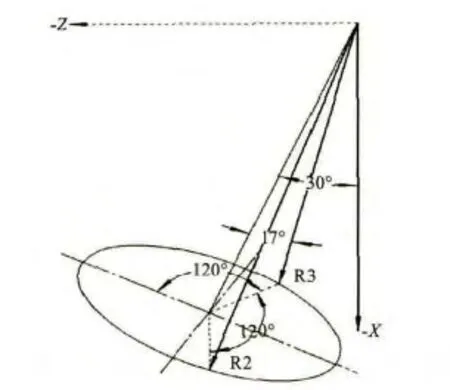
图2 波束指向示意图Fig.2 Schematic diagram of beam pointing
以R5的指向为-X轴。在R5与圆锥轴线构成的平面内。与R5垂直且指向R2和R3方向为-Z轴,以X、Y、Z为右手系为原则确定Y轴指向,测速三个方向在坐标系中的标称指向为:
4 验证试验
在某次飞行实验中,激光测速雷达被挂载在直升机上,镜头组、光电箱和光纤固定在直升机外面,记录数据用计算机和电池放置在直升机内部。飞行时能见度为2 km。最高飞行高度达到3 km。
图3 挂载用直升机Fig.3 Mount by helicopter
对实验场地的作用目标进行分析,直升机飞行下方主要由黄土地、绿草地、黑色沥青马路及水泥建筑物顶部组成。
三通道的速度随时间变化曲线如图4所示。
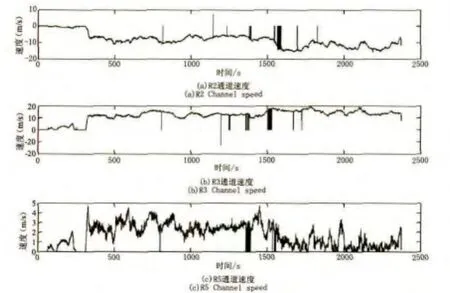
图4 三通道速度图Fig.4 Three channel speed
从图4中可以看出,三通道的速度有些为0,偶尔出现正负跳变的情况。点数统计如表1所示。
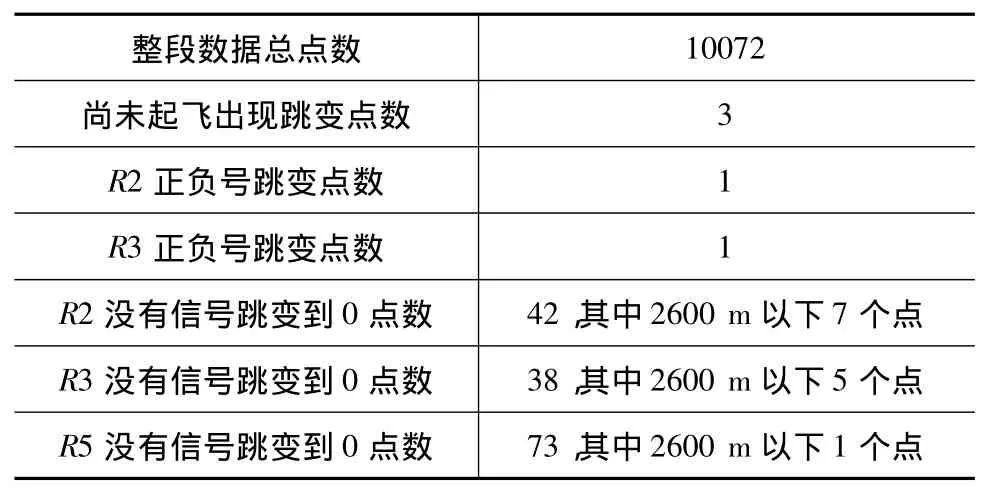
表1 数据坏点分析表Tab.1 Data point table analysis
根据雷达测得的三通道速度数据解算出的速度矢量大小,将其与通过GPS测得的速度大小值做比对,测速雷达的试验结果如图5所示。
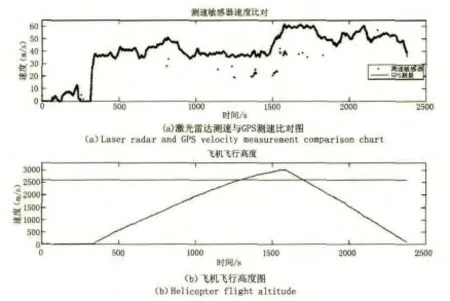
图5 速度比对图Fig.5 Speed comparison chart
从图5可以看出,雷达所测得的速度和GPS所测出的速度吻合性很好,在2600以下只有5个跳变点。
图6和表2为测速雷达每个通道测得的原始数据方差进行分析统计结果。
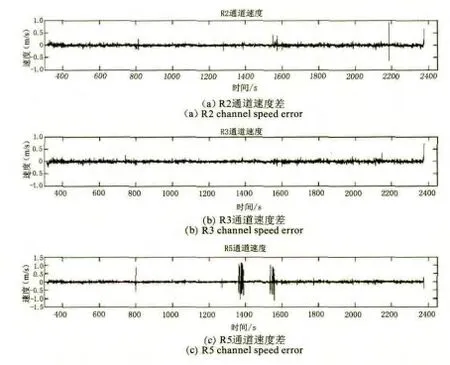
图6 速度误差分析Fig.6 Analysis of the speed error
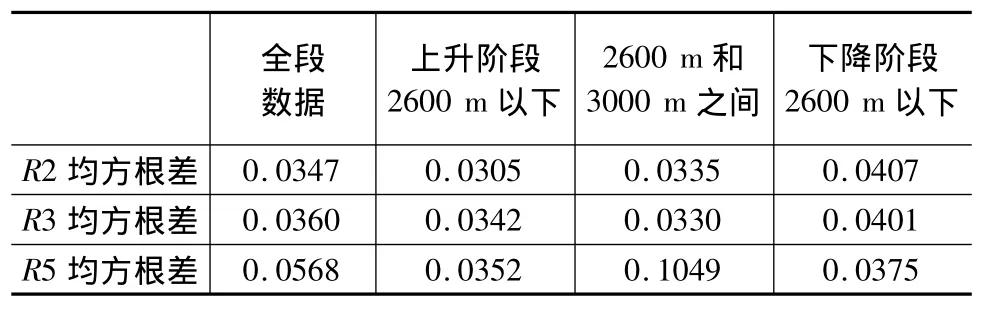
表2 均方根差统计表Tab.2 The root mean square error statistics
5 试验结果分析
在飞行试验中,最高飞行高度达到3 km。需要将大气中的作用那个距离折算到真空中。空中对地面(大目标)激光测量的接收功率Pr由下式计算:

式中,Pr为作用距离最远处接收功率;Pt为激光发射功率;Ac为接收有效口径面积;ρ为目标反射率;k为光学系统透过率;R为距离;σ为地面大气衰减系数;G为大气修正因子(地面G=1)。
以下标“0”表示月球上测量参数,月球上σ0=0。
同一个台激光测速敏器在地面上空测量与月面上空测量的激光接收功率比为:

当Pr/Pr0=1时,由式(10)可得地面上空测量距离等效月面上空(无大气衰减)距离为:

a)目标反射率。月球表面反射率ρ0=6%,试验区地面反射率按ρ=0.10计算,则有:

b)大气衰减系数。激光波长λ =1.5 μm,较大雾天,能见度2 km左右,按能见度3 km计算,查表可得大气衰减系数σ =0.77/km。
c)大气修正因子。激光波长λ =1.5 μm,飞行高度3 km,由资料可得大气修正因子G=0.7。
由上面的公式可以折算出地面上测量距离等效月面上空的作用距离如表3所示。

表3 作用距离等效表Tab.3 Effect of distance equivalent table
由此可见,在本次飞行试验中,等效到真空中作用距离为 3.76 km,测速均方根误差(3σ)为 0.1221 m/s。
6 结论
本文介绍了用于着陆器降落的全光纤激光相干测速雷达的原理方案以及外场飞行试验,对外场飞行试验结果进行了分析,结果表明,其等效在真空中的作用距离为3.76 km,测速均方根误差为 0.1221 m/s。
[1] AronA Wolf,Jeff Tooley,et al.Performance trades for mars pinpoint landing[J].Proc.of IEEE Aerospace Conference,2006:1661.
[2] A L Duff,G Plantier,J C Valière,et al.Analog sensor design proposal for laser Doppler velocimetry[J].IEEE Sensors J.,2004,4(2):257-261.
[3] J MVaughan,K O Steinvall,C Werner,et al.Coherent laser radar in Europe[J].Proc.IEEE,1996,84:205-226.
[4] R MHuffaker,R M Hardesty.Remote sensing of atmospheric wind velocities using solid-state and CO2coherent laser systems[J].Proc.IEEE,1996,84:181-204.
[5] Alfred B Gschwendtner,William E Keicher.Development of Coherent Laser Radar at Lincoln Laboratory[J].Lincoln Laboratory Journal,2000,12(2):383-385.
[6] YU Xiao,HONG Guanglie,LING Yuan,et al.Homodyne detection of distance and velocity by chirped-amplitude modulated lidar[J].Acta Optica Sinica,2011,31(6):2778.(in Chinese)于啸,洪光烈,凌元,等.啁啾调幅激光雷达对距离和速度的零差探测[J].光学学报,2011,31(6):2778.