微小型无人机摄像镜头控制系统设计
2015-03-23西安武警工程大学信息工程系杨尚东
西安武警工程大学信息工程系 杨尚东
西安武警工程大学装备工程学院 邓春泽
1 镜头控制器
机载摄像镜头控制器需要具备良好的实时性、可靠性、嵌入性和低功耗等特点。实时性要求指令或信令能够以最快的速度完成处理并输出控制信号;可靠性要求具备较强的抗干扰能力;嵌入性要求重量轻、体积小。由于采用同步快速聚焦设计,对控制器的CPU资源占用会变得非常小,结合微小型无人机摄像镜头控制系统的设计需求,本文的设计完全可以利用微小型无人机飞控处理器的剩余运算能力来实现。因此本文采用STM32F103RB ARM处理器的富余I/O资源,以接口函数的形式加入原有飞控程序中,既减少了系统耗电,又省去了处理器之间的数据通信。STM32F103RB ARM处理器是ST公司生产的一款功能强大的微控制器产品,广泛用于家用电器、应用控制、医疗、手持设备、PC游戏外设、GPS平台、可编程控制器、变频器、打印机、警报系统等领域,该芯片作为微小型无人机飞行控制与导航的CPU,具有高性能、低成本、低功耗的特点。
本文的设计采用STM32F103RB处理器定时功能产生控制信号,主要完成以下工作:(1)通过16位的定时器,控制步进电机的周期和步长,实现步进电机周期在几微秒到几毫秒之间的调整。(2)通过驱动器MD127芯片将处理器4个富余I/O口输出的时序方波转变成2个步进电机的驱动信号,当定时器溢出位时,产生内部中断,进行单步驱动,通过调整定时长度控制步进电机的速度。
2 镜头控制系统硬件设计
镜头控制主要由ARM处理器、步进电机驱动器、步进电机、地面控制端、数传电台等部分组成。步进电机驱动电路完成的主要功能为:步进电机的正反转、速度控制,对步长的精确控制,按照CPU计算结果实现镜头的变倍同步聚焦;地面控制端对微小型无人机摄像镜头进行实时变焦,确保图像信息的清晰采集,同时完成对镜头的实时控制。飞控系统中的ARM处理器除完成姿态测量、飞行控制和遥控遥测通信外,其富余的资源还可用于镜头的控制;数传电台的任务是实现地面控制端与微小型无人机之间的通信,将地面控制端的指令、信令按照要求快速、准确地传到无人机飞行控制器上,同时机载数传电台将无人机的姿态、GPS坐标、速度和压缩处理后的图像信息等实时传送到地面控制端。
步进电机安装在镜头上方,镜头通过卡槽与CCD传感器芯片相连,步进电机转轴与减速齿轮啮合,步进电机转动时,通过减速齿轮推动固定在镜头内侧凹槽上的两组镜片。驱动电路的驱动器采用SiTI公司的MD127,它是一个低电压操作,高效率MOS控制驱动器,芯片具有小型化、轻量化的特点,并具有热关断保护功能。驱动器芯片的四个输入引脚连接单片机的四个I/O口,通过驱动器的两组对称输出引脚来控制步进电机,如图1所示。
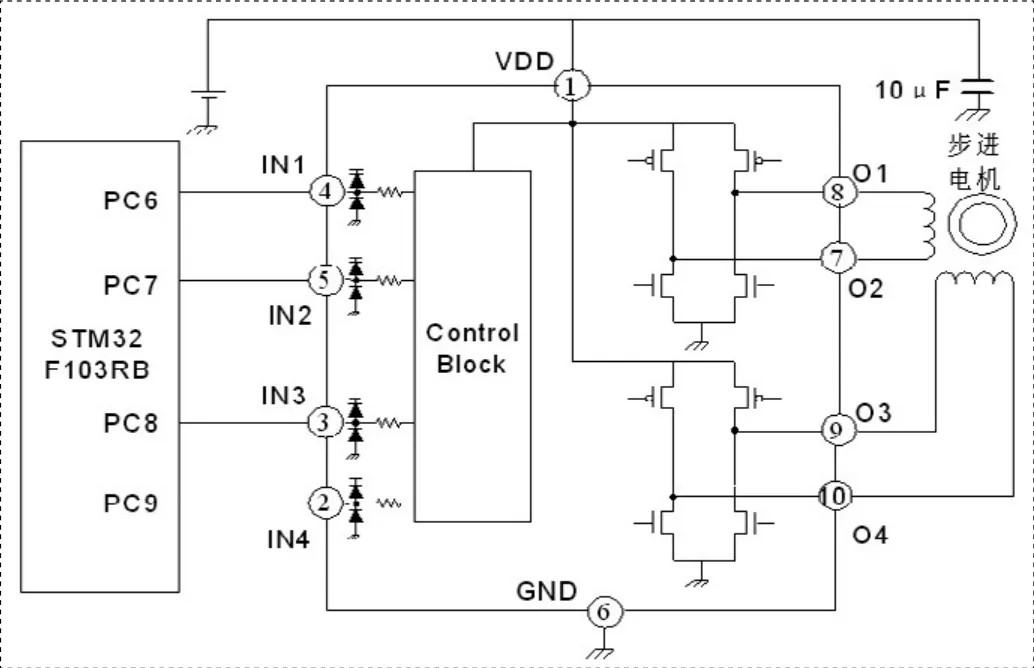
图1 电机驱动硬件电路
3 镜头控制系统软件设计
镜头控制系统的软件程序根据设定的模式对镜头发出各种控制信号,驱动镜头完成该模式下的各种动作,并根据所获得的参数来判断镜头是否正常工作,并且与外围电路以及地面控制端进行数据传输。镜头控制系统软件主要由主控制程序、定时中断服务程序、步进电机位置控制程序、步进电机加减速控制程序等构成。
主控制程序通过对指令或信令的解析,判断步进电机的停止和正反转等状态,其流程图如图2所示。
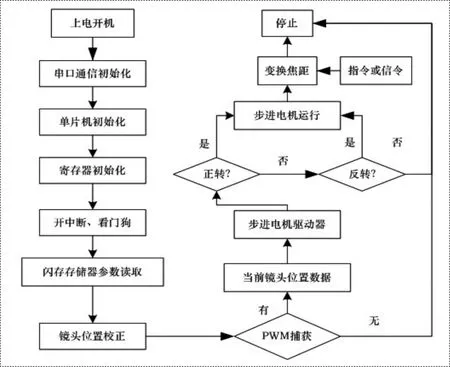
图2 主程序流程图
定时中断服务程序将脉冲信号传送到MD127驱动器中,完成步进电机的方向和速度变换,实现变倍同步聚焦,本文设计的系统采用定时中断实现单步步长,定时中断服务程序如图3所示。
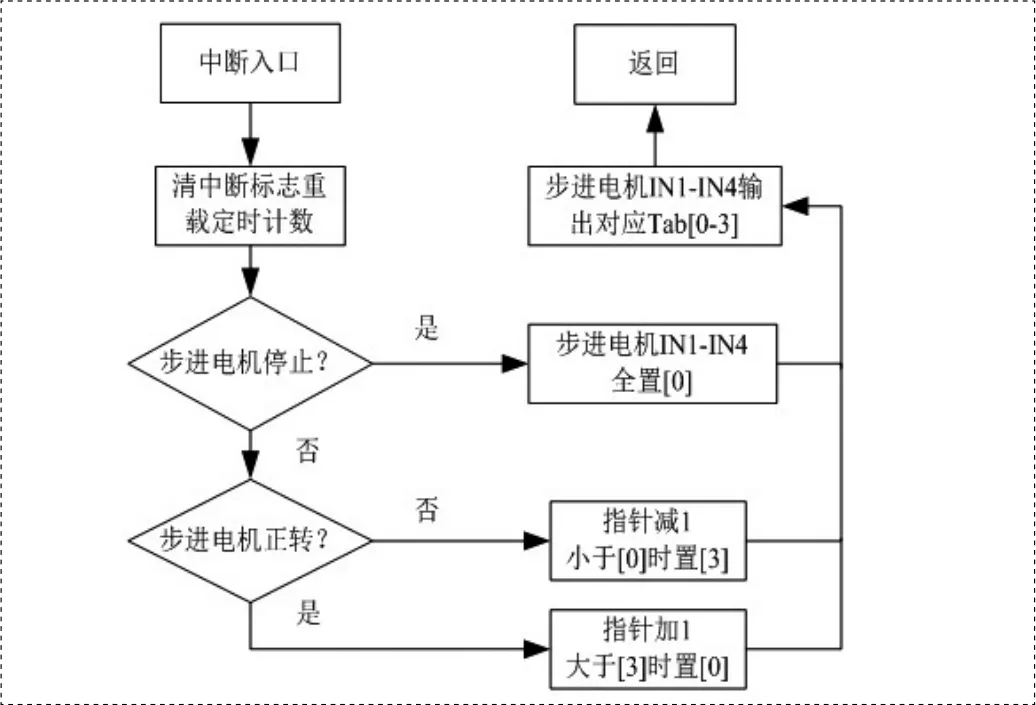
图3 定时中断服务程序实现步进电机单步运行
步进电机位置控制程序的工作方法为:步进电机每走一步,步数减1,当执行机构到达目标位置时,如果没有失步存在,步数正好减到0,因此,用步数等于0来判断是否移动到目标位,作为步进电机停止运行的信号。绝对位置参数可作为人机对话的显示参数,它与步进电机的转向有关,当步进电机正转时,绝对位置随每次步进加1;当步进电机反转时,绝对位置随每次步进减1。每次定时器周期中断都表示步进电机已经走了一步,因此,需要对相对位置进行加减1操作,根据转向对绝对位置进行加1或减1操作,并且还要判断绝对位置是否越界,相对位置是否为0。绝对位置在处理器内存中实际的物理意义就是当前镜头对应的焦距(变焦倍数),这一参数配合高度信息可以为地面站判断目标景物大小提供参考依据。步进电机位置控制子程序在每次定时器周期中断时调用一次,其流程图如图4所示。
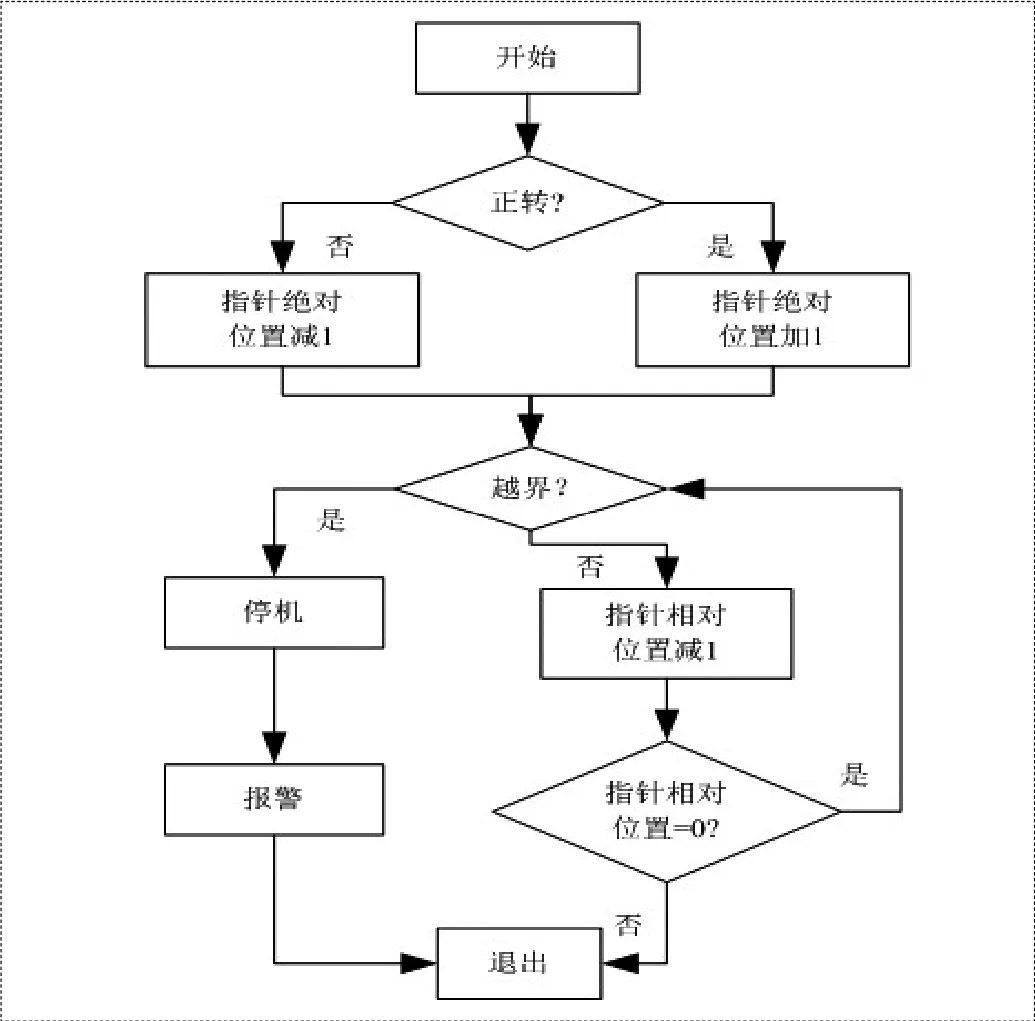
图4 位置控制程序流程图
[1] Driving Bipolar Stepper Motors Using a Mediumdensity STM32F103xx Microcontroller[EB/OL].http://www.st.com/stonline/products/literature/an/14946.pdf. 2009.
[2] 彭旭昀.机电控制系统原理及工程应用[M].北京:机械工业出版社,2007.
[3] 杨胜科,汪骏发,王建宇.航空遥感中POS与稳定平台控制组合技术[J].电光与控制,2008,15(2):62-65.
[4] Subrata Chattopadhyay,Utpal Chakraborty,Arindam Bhakta and Sagarika Pal.Digital Position Control System of a Motorized Valve in a Process Plant Using Hybrid Stepper Motor as Actuator[J].Sensors & Transducers Journal,2009,105(6):73-80.
[5] S.F.Rezeka,N.M.Elsodany,N.A.Maharem.Fuzzy Gain Scheduling Control of a Stepper Motor Driving a Flexible Rotor[J].European Journal of Scientific Research,2010,39(1):50-63.
[6] 郑春阳,李胜利,徐敏.采用步进电机的CCD自动聚焦控制系统[J].微特电机,2004(2):29-30.