基于机器视觉的手势识别系统设计与实现
2015-03-21刘德强
刘德强
(吉林铁道职业技术学院,吉林 吉林 132001)
1 系统的硬件设计
该系统的硬件由FPGA主控制模块、摄像头采集模块以及FT245RL接口设计模块等构成。FPGA采用Altera公司的CycloneII系列的EP2C70F896C6N,具有4608到68416个逻辑单元(LE),并具有一整套最佳的功能,包括嵌入式18×18乘法器、专用外部存储器接口电路、4kbit嵌入式存储器块、锁相环(PLL)和高速差分I/O能力满足系统开发要求。图像采集模块使用OV7650采集图像数据,它是一款高集成度的高分辨率(640×480)逐行/隔行扫描CMOS数字视频摄像芯片。FT245RL芯片是一款可进行USB和并行I/O协议转换的通信芯片,可实现FPGA与PC机之间的数据高速传输。
2 系统的软件设计
系统的软件设计使用Microsoft Visual Studio2012编程,系统初始化之后调用FT_Open_Device打开所要操作的USB接口,调用FT_Read_Byte_Date可将数据从FT245 RL的缓冲区中读取出。手势图像由FPGA经过FT245RL传输到PC机,上位机读取图像后首先进行图像预处理及高斯滤波,主要使用Open CV库中的cv Smooth函数。然后使用相关函数进行特征提取包括手势分割、二值化求取手势轮廓等,经过基于Hausdorff距离的方法匹配识别手势。
手势进行特征提取时,第一步是手势分割,手势的分割方法一般分为三类:一是基于直方图的分割(阈值法),二是基于边缘和区域的分割,三是基于颜色空间的分割方法。每种方法既有自己的优势,也存在一些劣势。系统采用颜色空间的分割的方法,不仅将手势进行基于颜色空间的分割,还完成了图像二值化处理。模板匹配是最常用的图像识别方法之一,主要将从待识别的图像提取的特征量与模板对应的特征量进行比较,计算图像和模板特征量之间的距离,用最小距离法进行判断。本系统采用基于改进的Hausdorff距离的方法进行图像模板匹配识别。
3 系统的实验与数据分析
(1)手势实验。实验工具为Microsoft Visual Studio2012,函数库为Open CV2.4.8,图片分辨率为640*480。对数据的处理采用高斯滤波进行数字滤波,滤除图像信息中存在的一些不必要的信号。预处理采用的高斯滤波是一种线性平滑滤波,适用于消除高斯噪声,广泛应用于图像处理的减噪过程。人类的肤色在YCb Cr颜色空间具有聚类特性,所以选择YCrCb颜色空间进行手势检测,需要完成RGB颜色空间到YCbCr颜色空间的转换。将手势彩色图像从RGB色彩空间映射到YCbCr色彩空间,建立模型并计算相似度,再进行归一化处理,在经过手势相似度求取后,在形成的手势相似度图像中,手势区域与背景区域在灰度上有一定的差别,利用这种差别经过二值化求取手势轮廓。其中二值化阈值采用整幅图像的灰度均值。若像素的灰度值大于平均值,则将其灰度值设为0;若少于平均值,则设为255。
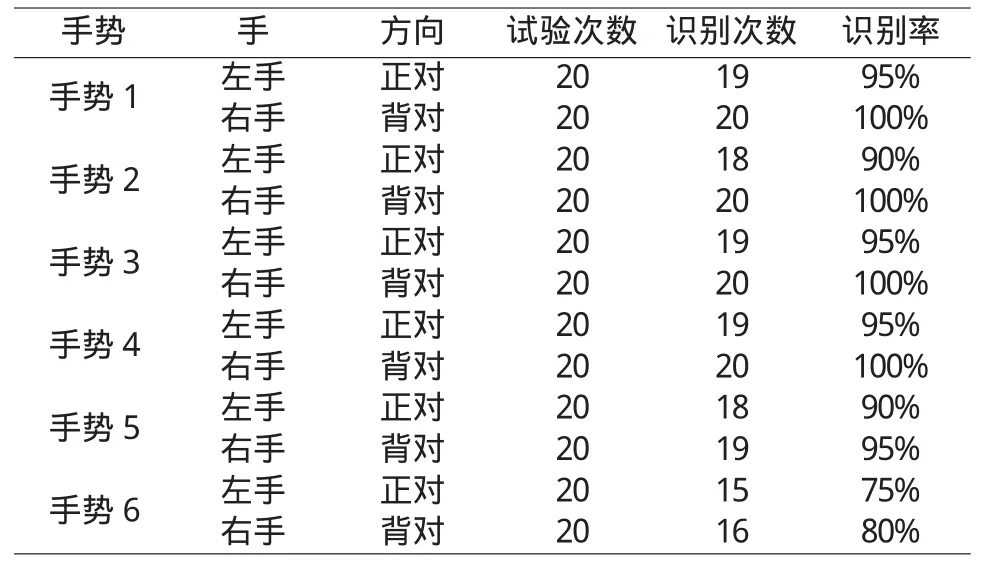
表1 手势识别结果
(2)实验结果。在进行识别匹配实验时,通过加载6个手势作为手势库,采用OpenCV库中函数进行手势算法识别。由于左右手的方向不一致,以及为使实验更公平可信,本次实验分为右手和左手进行实验,同时采用手正对摄像头与背对摄像头两种方式,每只手进行48次,每种手势进行16遍,一共进行84次手势识别实验。实验结果如表1所示。从表1可以看出,本系统设计的手势识别对于手势6的识别率最低,原因在于手势语手势4的相似度较高。同时,识别左手时相对右手的识别率较低,原因在于手势库中的手势是以右手为模板。且就手势方向来看,对本次实验手势的识别影响不是很大。从总体上来看,本系统的识别率最高达100%,最低也达到了86%,系统设计简单合理。
4 结语
基于机器视觉的手势识别系统设计是未来的发展趋势。本文讨论了系统设计中涉及的手势识别技术,以及在实现手势识别系统时需要解决的难点以及重点。目前手势识别技术还不够成熟,但我相信手势识别会增强现如今的人机交互模式,促进人机交互技术的发展。
[1]裴向东,陈箫,等.基于USB-FIFO的FPGA与上位机通信的设计与实现[J].计算机测量与控制,2012,(4).
[2]冯志全,蒋彦.手势识别研究综述[J].济南大学学报(自然科学版),2013,(4).
[3]杨青,陈喆.一种用于手势识别系统的指尖检侧方法[A].2010年通信理论与信号处理学术年会论文集[C].2010.