基于模糊自适应PID的空气压缩机节能控制设计
2015-03-21陈洪军
陈洪军
(吉林铁道职业技术学院 电气工程系,吉林 吉林 132002)
1 空气压缩机
(1)离心式压缩机。离心压缩机主要性能参数为压力比、效率及流量。运行中压缩机的运行工况常常发生变化,为了反映不同工况下压缩机的性能,通常把在一定进气状态下对应各种转速、进气流量与压缩机排气压力(或压比)、功率及效率的关系用曲线形式表示出来。
(2)变工况调节。压缩机在稳定工况下运行,取决于压缩机本身的性能、管网的特性、取决于驱动机和机械传动系统的性能。任何一个变负荷工况的关键是确定负荷变化时的加工空气量以及其他工艺参数,首先要根据氧气负荷确定分离空气量,然后由分离空气量确定出氮气量和氩气量。液体产量按工艺要求而定,根据产品量和分离空气量,由冷量平衡式,初步确定膨胀空气量,再进一步确定膨胀空气旁通量和加工空气量的初值。由加工空气量的初值,可以进一步计算膨胀空气量,最终确定加工空气量,根据加工空气量与空压机排气压力的关系,就可以确定出空压机的排气压力,为性能控制器提供压力输入。
(3)空压机的调节方式。离心压缩机是与其它装置联合工作的。当装置的阻力系数在生产运行过程中很稳定时,压缩机则稳定在某一工况点工作。但是,在生产运行过程中,装置的阻力或者流量要求经常变化。为了适应管网特性曲线变化时,保证装置对压力(或者流量)特定值的要求,就需要改变压缩机的性能,使其在新的工况点工作。通常采用的调节方法可以分为3类:节流调节、变转速调节和变压缩机元件调节。
2 模糊控制系统及PID控制器的设计
模糊控制系统是以模糊数学、模糊语言形式的知识表示和模糊逻辑运算与模糊规则推理为理论基础;采用计算机控制技术构成一种具有反馈通道呈闭环结构形式的数字控制系统。模糊控制系统是人工智能算法与现代先进控制理论与技术相结合的一种模糊集成控制系统。模糊控制系统是由模糊控制器、输入/输出接口、执行机构、被控对象和测量与反馈装置等五部分组成。
模糊控制输入量的偏差e和偏差的变化率ec,通过模糊化的处理,得到各自的模糊语言变量E和EC。
模糊自适应控制器的设计包括以下内容:①确定模糊控制器的输入、输出变量;②设计模糊控制器的控制规则;③确立模糊化和非模糊化的方法;④选择模糊控制器的输入、输出变量的论域并确定模糊控制器的参数;⑤编制模糊控制算法的应用程序;⑥合理选择模糊控制算法的采样时间。模糊控制设计的核心是总结工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到针对 Kp、Ki、Kd,模糊控制规则表建立好后,可根据如下方法进行Kp、Ki、Kd的自适应校正。
编制m文件,在MATLAB环境下进行仿真。控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正。
模糊变量采用正态分布的隶属度函数,此类隶属函数虽然符合人的思维特点,但存在着计算麻烦的缺点,在实际应用中不易于编程。正态分布曲线可用梯形或三角形来近似。使用梯形的隶属函数的曲线可保证足够的精度,其灵活性也比较大,它包括了三角形等各种形状,并且可大大减少模糊化时的计算工作量,方便程序设计。接下来,采用三角形隶属度函数,来验证这种近似的可行性。
3 仿真实验
本文以某空分空压机设计流量为40000m3/h,压力0.63MPa,在此工况下压缩机运行最优,效率最高,产量大大增加。由于采用开环控制,通过调研发现,实际运转流量为38330m3/h,压力0.47MPa,实际运转参数与设计值偏离很大,这样就会产生过大的冲击损失,浪费大量电能。而采用Fuzzy-PID控制后,不仅能使压缩机系统稳定在设计工况点,而且抗干扰能力强,如果将本文成果用于实际,可节约电能。仿真结果对比如图1所示。
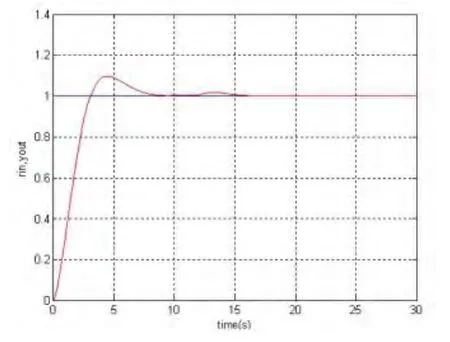
图1 仿真结果对比图
4 结论
建立了空气压缩机恒压控制系统分别采用传统的PID控制和Fuzzy-PID控制,对系统进行了性能控制器仿真研究。仿真结果显示,相对于传统的PID控制,Fuzzy-PID控制的各项参数都优于传统的PID控制,能够更好地将压缩机工作点稳定在设计工作点,有利于整个压缩机系统的节能降耗,对节能减排具有非常重大的意义。
[1]何林海,王月华.高压变频调速技术应用研究[J].新疆石油科技,2000,10(1).
[2]王丽春,樊会元.离心压缩机性能预测的神经网络方法[J].华东冶金学院学报,2000,4(2).
