浅谈圆形料场的电气控制系统
2015-03-20武海虹
武海虹
(太原重工股份有限公司 技术中心,山西 太原 030024)
引言
长期以来开放式储料场,特别是污染性大的物料对周边地区的环境造成了严重的污染,先进环保的全封闭式圆形煤场及其设备已得到人们的广泛重视,全封闭式圆形料场在周边地区的环境保护发挥越来越重要的作用。
圆形料场中的物料由圆拱球冠形钢结构网架屋盖和环形筋板式钢筋混凝土挡料墙将其封闭起来,输送栈桥及转运站也用彩钢板封闭起来,这样就能够保证物料在运输和堆放过程中始终处于全封闭状态,较好地解决了储料场对其周围环境的污染问题。
1 机械结构
圆形料场主要由料仓、进出料系统、堆料机、取料机和中心立柱五部分组成,取料和堆料作业时具备两个层次分明的堆料回转机构和取料回转机构,使悬臂料机和取料机形成两套互不干涉、相对独立的运行系统,实现同时进行堆料和取料作业(见图1)。悬臂堆料机由皮带堆料机和进料带式输送机组成。取料机由刮板取料机、中心锥形料斗、出料带式输送机组成。进料皮带钢结构栈桥的终端跨在圆形堆取料机的中心立柱的顶部;取料刮板机是由横跨在圆形料场的半门架结构所支撑,这种取料机也称门架式取料机,门架的另外一端支撑在安装于圆形料场的挡墙上部的圆周轨道上,通过台车组实现驱动回转,因此,门架式取料机可通过取料回转机构绕着中心立柱做定心旋转。
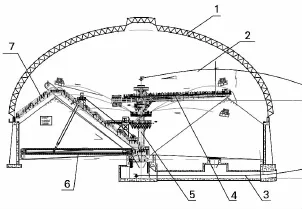
图1 圆形料场机械结构图
2 工作原理
2.1 堆料机工作原理
堆料机回转到预堆料的料仓区域,调整堆料机俯仰角度至最低位置,并开始按要求进行定点堆料。物料由顶部栈桥上的入料胶带机运进料仓并通过落料抖落到堆料机悬臂胶带上,并由悬臂头部卸料。
堆料时堆料机在一点开始堆积物料,随着物料堆积高度的增加,不断调整俯仰角度,直到逐步将物料堆到预定高度,形成一个圆锥体,然后堆料臂回转一定角度后,继续堆料,料堆达到预定高度后继续回转设定的角度堆料,如此往复,直至将预定堆料区域堆满或接到停机(调车)指令后停车(调车)。
2.2 取料机工作原理
取料机在料堆另一侧进行取料作业,首先运行到指定取料区域,然后通过变幅机构将取料臂降到料面上并深入料堆的一个预定深度进行取料,取料的同时门架和取料臂按设定的行走速度向一个方向(如顺时针)进行回转,直至将预定角度内的一层物料全部取净。取料臂每取完一层物料后,按预置的指令下降相应的角度(即相应的取料深度)继续取料,同时取料臂向另一个方向(如逆时针)回转,如此反复,将该区域内物料逐层取出,除非取料过程中有特殊调车指令,否则直至该区域的物料全部取净后才将取料臂升到39°,更换取料区域。
3 控制方式
圆形料场的堆取料机整体电气控制系统采用可编程序控制器(PLC)和人机界面(工控机)做整机的主控单元,进行整机各部分的集中控制,协调整机的连续生产过程,同时,工控机可以监控全机的运作情况以及故障状态,并做出相应的处理和报警(如图2所示)。
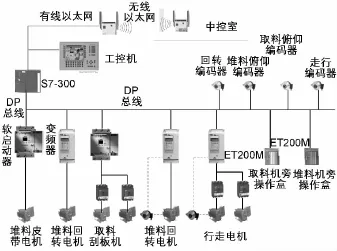
图2 圆形料场控制系统机构图
3.1 堆料机控制
堆料皮带的驱动装置采用电机软起动;回转驱动装置采用变频器驱动;俯仰机构采用液压缸驱动方式。
3.2 取料控制
取料刮板的驱动装置采用电机软起动;回转驱动装置采用变频器驱动;取料机变幅驱动装置采用变频器驱动。
4 操作方式
4.1 手动操作模式
在司机室的操作台及工控机上完成,主要作用是完成堆取料机各部分的手动操作,堆取料机各部分之间设有安全可靠的联锁。
4.2 PLC半自动操作
操作人员只需根据中控室指令,将堆料或取料作业的作业地点、作业距离等参数输入到PLC里,并得到PLC确认后,按启动按钮,PLC即可根据上述作业参数对设备进行自动控制,完成堆料或取料作业。各机构除必要的保护外,机构之间还设有联锁,以保证设备的安全。
4.3 机旁就地操作
为方便各机构调试和检修,在主要机构附近设置就地操作箱,主要用来控制各部分机构的点动操作,各机构动作时无联锁关系,操作时,必须做好安全措施。
5 机构动作流程控制
1)开启堆取料机主电机电源。
2)开启堆料机回转功能,将堆料机回转至堆料位置。回转机构设有四个限位,左右两个方向的限位及极限限位。当回转达到限位时报警,达到极限限位时,自动停止回转动作。
3)操作俯仰装置,将堆料机俯仰至所需堆料角度,俯仰机构同样设置限位以及极限限位。
4)开启堆料皮带功能,同时开启进料皮带,并打开抑尘系统。皮带机设有拉线、跑偏、速度检测、物料检测等检测开关,用于保证皮带机的安全运行及对故障进行报警。
5)随着堆料运作过程的进行,俯仰油缸驱动堆料机进行俯仰操作以调整堆料高度,满足堆料高度的需要。
6)在堆料机工作的同时,开启刮板取料机行走(回转)装置,将取料机移动到需要取料的位置。
7)通过变幅机构调整取料机的高度,将取料机降至料面上并深入料堆的一个预定深度。
8)先开启刮板取料机的刮板机,再开启行走(回转)装置带动取料机在环形轨道上移动,通过调节行(回转)走装置的移动速度以满足不同取料量的需要。刮板取料机上设有高低位物料检测开关,以控制取料机的回转及俯仰。
9)在开启刮板取料机的同时,启动下部出料皮带机将所取物料输送至转运站。
10)刮板取料机与出料皮带机之间安装有活化给料机,可将取料机所取煤料定量散落在出料皮带机上,防止物料集中将皮带机压死。
11)当堆料结束后,先将入料皮带机停止,然后再停止堆料皮带机。
12)当取料结束后,将取料机通过变幅机构提升至最大角度,便于对取料机的回转移动。
13)完成以上操作,可进行下一次堆料或取料,重复上述步骤。
6 联锁系统
1)堆料胶带机与入料皮带机进行联锁,保证当入料皮带机启动时,堆料皮带机处于工作状态。
2)堆料胶带机与抑尘系统进行联锁,保证当堆料胶带机工作时,抑尘系统处于开启状态。
3)堆料胶带机与回转机构进行联锁,当堆料胶带机工作时,回转机构不能启动。
4)堆料胶带机与刮板取料机进行联锁,当堆料胶带机处于部分工作范围状态时,刮板取料机的行走装置应保证取料机与堆料机之间的安全距离,防止发生碰撞。
5)刮板取料机与行走机构进行联锁,当行走机构处于调车状态时,刮板取料机应处于上仰最大状态,防止与物料发生碰撞。
6)变幅机构与行走(回转)机构进行联锁,在变幅机构处于工作状态时,行走(回转)机构不能启动。同时行走机构工作时,变幅机构不能启动。
7)堆料机与取料机之间应设置有安全角度,防止发生碰撞。
8)堆料机与取料机分别设有物料检测装置,防止与物料发生碰撞。
7 结语
圆形堆料场整体采用了PLC及工业级工控机两级控制系统,全面提升设备的自动化控制水平,减少维护及操作人员,大幅度减低生产运行及维护成本,大大提高了整个物料输送系统的生产效率和设备的安全可靠性能。
