一种小型无人机数字跟踪软件系统的设计与实现
2015-03-15赵会杰
赵会杰,陈 黎,温 喆
(1.河北诺亚人力资源开发有限公司,河北 石家庄 050035;
2.总装备部北京军事代表局驻石家庄地区军事代表室,河北 石家庄 050002;
3.石家庄学院 计算机学院,河北 石家庄 050035)
一种小型无人机数字跟踪软件系统的设计与实现
赵会杰1,陈黎2,温喆3
(1.河北诺亚人力资源开发有限公司,河北 石家庄 050035;
2.总装备部北京军事代表局驻石家庄地区军事代表室,河北 石家庄 050002;
3.石家庄学院 计算机学院,河北 石家庄 050035)
摘要地面跟踪系统是无人机遥测遥控系统的重要组成部分,保证地面跟踪系统的正确跟踪指向是无人机遥测遥控系统可靠工作的关键技术问题。针对小型无人机地面跟踪系统的功能要求和存在的问题,提出了以信号跟踪为主、数字引导为辅的一种数字跟踪技术,设计了一种小型无人机数字跟踪软件系统并给出了设计的原理与设计流程。通过多次飞行试验,系统工作稳定、可靠,满足小型无人机的跟踪监视需求。
关键词数字引导;信号跟踪;误差电压;天线定标
Design and Implementation of Small UAV Digital Tracking Software System
ZHAO Hui-jie1,CHEN Li2,WEN Zhe3
(1.HebeiNoahHumanResourcesDevelopmentCo.,Ltd,ShijiazhuangHeibei050035China;
2.PLAGeneralArmamentDepartmentoftheBeijingMilitaryRepresentativesBureau,
TheOfficeinShijiazhuangProvince,ShijiazhuangHeibei050002China;
3.CollegeofComputerScience,ShijiazhuangUniversity,ShijiazhuangHeibei050035China)
AbstractThe ground tracking system is an important part of UAV telemetry and telecontrol system,of which the key of reliable operation is to ensure proper tracking of ground tracking system.In view of functional requirements and existing problems of small UAV ground tracking system,this paper proposes a digital tracking technique focusing mainly on signal tracking and taking digital guide as aid.This paper designs a small UAV digital tracking software system and describes the design principle and design flow.The flight test results show that this system is stable and reliable,and can meet the requirements of small UAV tracking and monitoring.
Key wordsdigital guide;signal tracking;error voltage;antenna calibration
0引言
无人机是由航空模型飞机发展而来的,它是用无线电或自身程序控制无人驾驶的飞行器[1],为保证对无人机的远距离操纵以及侦察信息的实时监视、记录及分发,必须具备一个稳定的地面跟踪系统。目前地面跟踪系统中大量使用的天线伺服设备不具备自跟踪功能,所以需要配置GPS接收机,由上位机软件特定的算法控制天线转动的角度来跟踪目标无人机,由于GPS接收机给出的位置信息存在误差,尤其是两点距离比较近时,跟踪误差会比较大;而且GPS接收机出现问题直接影响地面跟踪系统的稳定性。针对低速、自然稳定的小型无人机的飞行特点,引入跟踪接收机,通过跟踪接收机给出的误差电压信号来控制天线转动的角速度,同时结合GPS接收机给出的位置信息来控制天线转动的角度,来完成对无人机的实时跟踪,形成了一种以信号跟踪为主、数字引导为辅的一种数字跟踪技术[2,3]。这样不仅可以弥补地面跟踪系统存在的误差,还起到备份作用,增强了系统的稳定性。
1数字跟踪软件系统原理
在无人机遥控遥测系统中,地面跟踪系统就是操作地面天线实时准确地指向飞机,从而保证遥控遥测数据链路正常通信[4,5]。本文设计的数字跟踪软件系统是将信号跟踪与数字引导相辅相成,通过操纵天线伺服设备[6,7]的角速度与角位置来驱动天线朝向目标无人机运动,完成对无人机的实时跟踪,原理框图如图 1所示。

图1 数字跟踪软件系统原理
信号跟踪:根据定向天线接收到的电波信号,天线馈源内产生差路信号;跟踪接收机将差路信号中所携带的目标偏离天线的指向信息进行数字转换,然后输出误差电压信号。数字跟踪软件系统根据误差电压的正负、强弱来控制天线转动的角速度的正负、快慢,从而驱动天线朝减小误差的方向移动[8],来实现对无人机的实时跟踪。
数字引导:数字跟踪软件系统通过遥测数据中实时的目标位置信息与地面站的位置信息计算出地面天线相对目标的真北角(相对于正北的角度,正北为0°),然后减去天线定标后的“角度差”,计算得到天线需要转动的实时角度值,从而控制天线转动到相应角度,来实现对无人机的实时跟踪。
天线定标:通过手动模式将地面天线对准目标,然后通过遥测数据中实时的目标位置信息与地面站的位置信息计算出地面天线相对目标的真北角(相对于正北的角度,正北为0°),将这个真北角度与天线位置传感器得到的实时角度相减,求出“角度差”,从而完成地面天线0°指向与大地坐标0°指向的校正。
2数字跟踪软件系统算法与流程
2.1 系统算法设计
该小型无人机数字跟踪软件系统关键技术在于信号跟踪及数字引导算法[9-11]。信号跟踪算法是根据误差电压信号计算出角速度值;数字引导算法是根据两点的经纬度信息计算出角度值,通过控制天线的角速度以及要转到的角度来实现对无人机的实时跟踪。
算法基本参数如下:y表示角速度;x表示误差电压;L表示经度信息;B表示纬度信息;GDT表示地面站;UAV表示无人机;Az表示方位角。
如下:利用误差电压信号计算方位角速度y,误差电压为正数则角速度为正数,误差电压为负数则角速度为负数;
y=2x(0≤|x|≤0.5)
y=4x-1(0.5<|x|≤5)。
利用两点的经纬度信息计算出距离D,然后根据距离求出方位角Az。

cos(BGDT)*cos(LGDT-LUAV))*


2.2 系统流程设计
首先需要天线定标,因为地面天线的布设位置每次都会发生变化,因此地面天线重新布设后需要标定天线0°指向与大地坐标0°指向的夹角。然后将地面天线伺服设备切换为数字引导模式,根据数字引导算法计算出的角度值,将地面定向天线引导到合适的位置;这时可以将地面天线伺服设备切换为信号跟踪模式,根据信号跟踪算法实时计算出的天线转动的角速度值,驱动天线转动,从而实现对目标的实时跟踪。在跟踪过程中,链路通信信号突然减弱,而且数字引导得出的天线转动角度与天线实时回报的角度误差比较大时,可以将地面天线伺服设备切换为数字引导模式,对跟踪误差进行补偿,以保证再次切换到信号跟踪模式时天线跟踪保持在主波瓣范围内,设计流程图如图 2所示[12]。
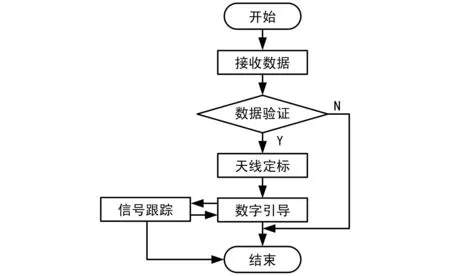
图2 数字跟踪软件系统流程
3仿真结果分析
根据软件仿真及现场实验,地面跟踪系统只采用数字引导算法,或者采用以信号跟踪为主,数字引导为辅相结合的算法,在飞机起飞阶段采用信号跟踪模式,在飞行过程中通过数字引导模式补偿,角度误差与两点距离的对应关系如图3所示。
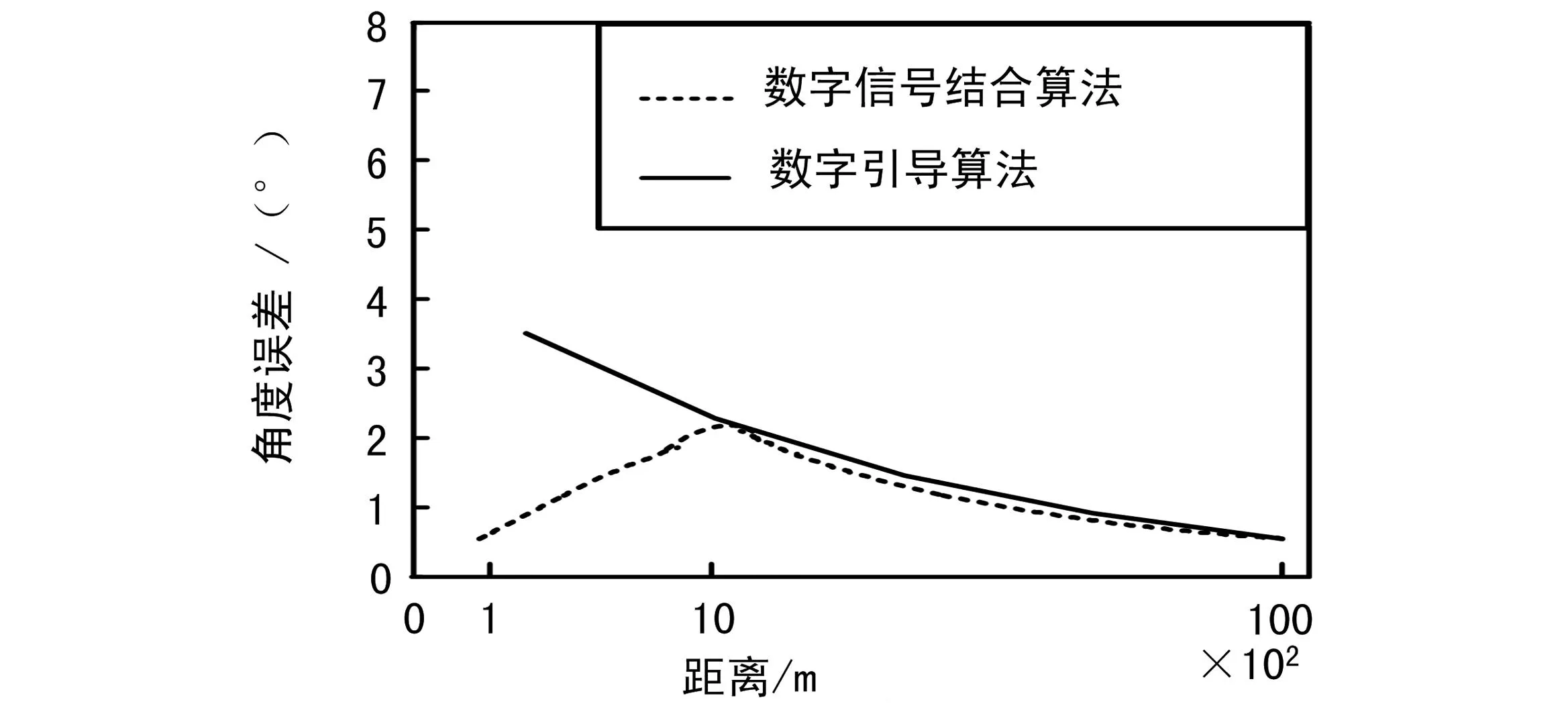
图3 角度误差与两点距离的对应关系
从图3中可以看出,仅通过数字引导算法来跟踪目标,方位角度的误差与两点间距离有关,当距离比较近时角度误差比较大;如果采用以信号跟踪为主,数字引导为辅相结合的算法来跟踪目标,两点间距离比较近时角度误差会缩小,并且天线转动稳定,没有左右摇摆现象,通过现场实验,在准确跟踪目标的情况下,得到误差电压信号强弱与天线转动角速度的对应关系,如图 4所示。
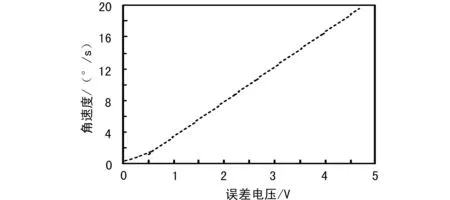
图4 误差电压与角速度的对应关系
从图4中可以看出,天线转动的快慢与误差电压信号的强弱有关,当误差电压为零时,天线保持不动;随着信号的增强,天线转动的速度会变快,从而驱动天线朝减小误差的方向移动。该系统虽然还存在角度误差,但使用宽波瓣的角反射天线后,该误差对于通信链路的影响是比较小的。
4结束语
该小型无人机数字跟踪软件系统已经基本趋于成熟,完全适用于各种低速、稳定的小型无人机系统,并且已经应用于无人机遥控遥测系统中,进行了多次飞行试验,保障了遥测遥控链路的正常通信,跟踪状况良好,系统工作稳定可靠,完全满足各种小型无人机的跟踪监视需求。但是为了在更多的测控系统中应用该数字跟踪软件系统,还需要不断地去探索,去研究。
参考文献
[1]吴汉平,龚伯凯.无人机系统导论[M].袁化伦,译.北京:电子工业出版社,2003.
[2]赵业福,李进华,李晓东,等.无线电跟踪测量系统[M].北京:国防工业出版社,2001.
[3]袁建平,方群,郑谔.GPS在飞行器定位导航中的应用[M].西安:西北工业大学出版社,2000.
[4]陆国雷,张晓林,金石,等.无人驾驶直升机遥测系统设计及其实现[J].北京航空航天大学学报,2003,29(2):112-115.
[5]金石,张晓林,马文智.一种无人驾驶直升机天线跟踪系统的研制[J].北京航空航天大学学报,2003,29(4):366-369.
[6]任金泉,周洪波,蔡文莉.车载天线伺服系统技术分析[J].无线电通信技术,2012,38(2):44-47.
[7]银秋华,周建寨.反射面天线增益的快速估算[J].无线电通信技术,2013,39(4):50-52.
[8]王迎节,杨社年,聂磊,等.天线跟踪和控制测量方法分析[J].无线电通信技术,2011,37(4):10-13.
[9]孔祥元,郭际明,刘宗泉.大地测量学基础[M].武汉:武汉大学出版社,2005.
[10]王佩贤,张国卿,王宝山,等.大地测量学基础[M].北京:煤炭工业出版社,2007.
[11]张凤举,张华海,赵长胜,等.控制测量学[M].北京:煤炭工业出版社,1999.
赵会杰男,(1985—),助理工程师。主要研究方向:航空测控技术。
陈黎男,(1984—),工程师。主要研究方向:航空测控技术。
作者简介
基金项目:国家高技术研究发展计划(“863”计划)资助项目(2013AA122105)。
收稿日期:2015-05-06
中图分类号TN820.4
文献标识码A
文章编号1003-3106(2015)08-0073-03
doi:10.3969/j.issn.1003-3106.2015.08.20
引用格式:赵会杰,陈黎,温喆.一种小型无人机数字跟踪软件系统的设计与实现[J].无线电工程,2015,45(8):73-75.
