舰船仿真噪声成像方法研究*
2015-03-15王笑孙超
王 笑 孙 超
(1.中国船舶重工集团公司第七一〇研究所 宜昌 443003)(2.西北工业大学 西安 710072)
舰船仿真噪声成像方法研究*
王 笑1孙 超2
(1.中国船舶重工集团公司第七一〇研究所 宜昌 443003)(2.西北工业大学 西安 710072)
根据舰船(舰艏、舰舯、舰艉)三个部位的辐射噪声具有明显不同的能量特性,将舰船简化为双亮点和三亮点模型,以MUSIC法和相干信号子空间法为基础,对舰船仿真辐射噪声用8元均匀圆阵进行两亮点和三亮点成像研究,从结果可以看出,这种方法可以很好地分辨不同的亮点。
被动声成像; MUSIC法; 相干信号子空间法
Class Number TP391
1 引言
现阶段水中近场被动目标探测系统,对目标进行探测时都是将目标当成点目标,如果被测目标尺度与接收阵之间的距离接近时,将目标当成一个点源显然是不合适的,当舰船被视为体目标时,与之当成点源时不同,我们需要了解船体不同发声部位的不同功率谱和能量情况,根据现在的研究,具有代表性的部位包括船头、主机部位、辅机部位、螺旋桨部位,这些部位也是能量集中的部位。
现在将舰船的辐射噪声当成点源来分辨的方法已经很多。针对舰船不同发声部位有不同的能量分布,我们采用简化的两亮点和三亮点来模拟舰船不同的发声部位,通过空间谱的构造,分辨仿真舰船宽带信号中的亮点成分,通过实验结果证明了仿真模型和算法的有效性。
2 基于MUSIC法的波达方向估计[10]
MUSIC算法,又称多重信号分类方法。MUSIC算法是一种基于矩阵特征空间分解的方法。其基本原理如下:
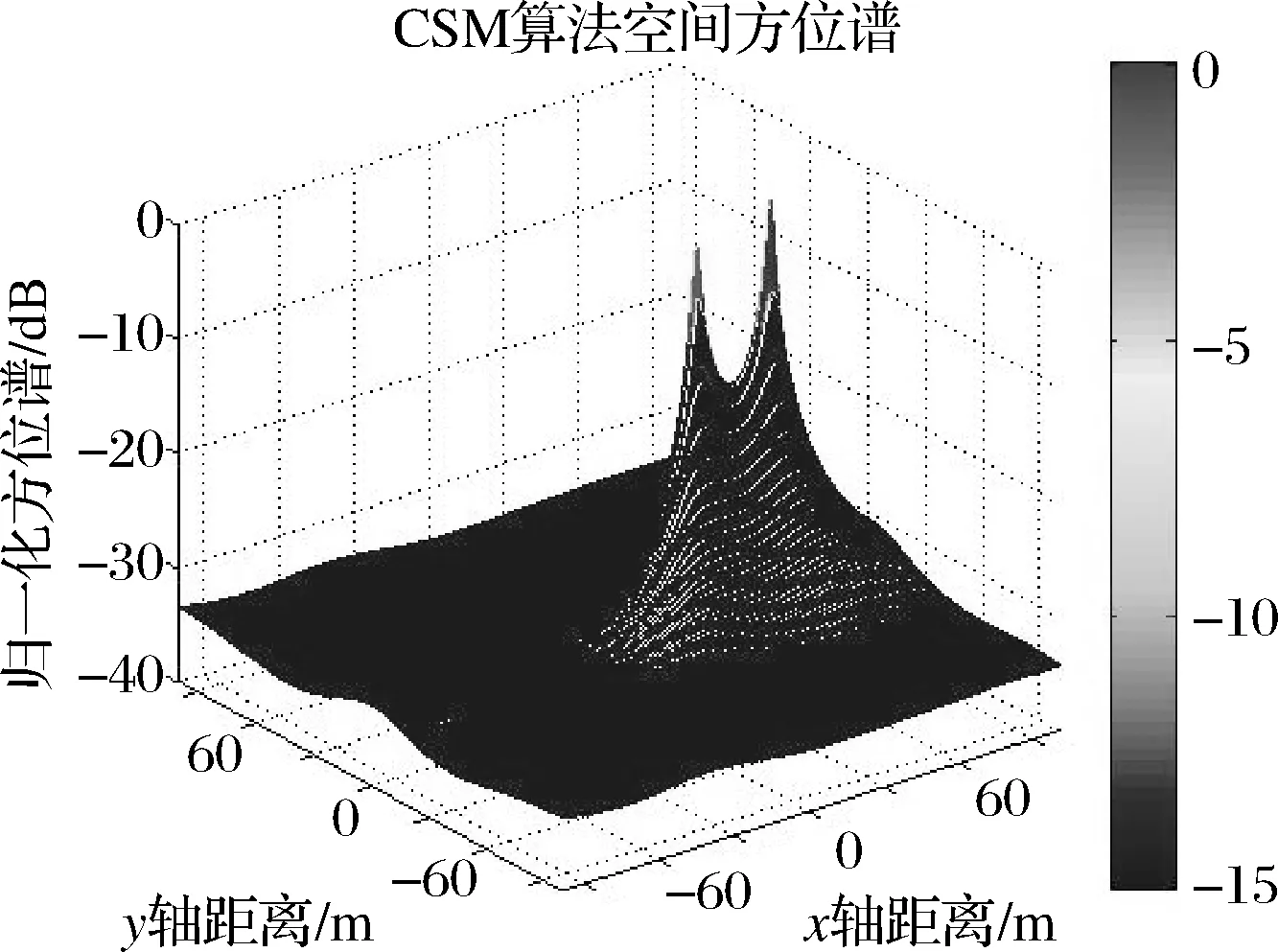
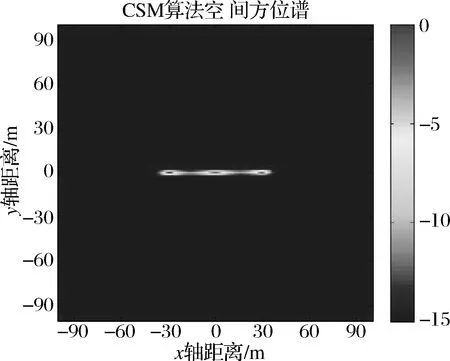
对于一个有M个阵元组成的已知任意形状的基阵,假设有D(D x(n)=A(θD)s(n)+n(n) (1) 式中,A(θD)=[a(θ1),a(θ2),…,a(θD)]是M×D维阵列流形矩阵: (2) s(n)=[s1(n),s2(n),…,sD(n)]T是D×1维信号源向量,n(n)是M×1维噪声向量。假设信号和噪声是不相关的,则接收数据的协方差矩阵可以表示为 Rx=A(ΘD)RsAH(ΘD)+Rn (3) 式中,Rs是D×D维的信号协方差矩阵,Rn是M×M维的噪声协方差矩阵。 Rs=E{ssH} (4) Rn=E{nnH} (5) 对协方差矩阵Rx进行特征分解: Rx=EΛEH (6) 式中,Λ是降序排列的特征值构成的对角阵,E=[Es,En]是对应的特征向量矩阵,Es是由较大的D个特征值对应的特征向量组成的信号特征向量矩阵,En是由较小的M-D个特征值对应的特征向量组成的噪声特征向量矩阵。假设信号源个数D是已知的。 则MUSIC算法的方位谱函数表达式为 (7) 式中,Θ表示入射角的观测范围。 让θ在观测范围内扫描,计算出式(7)在各扫描方位的对应函数值,该函数值出现峰值(一般有D个峰值)的方位,即为信号方位的估计值。 相干信号子空间(CSM)算法是处理宽带信号的一种有效算法,其核心思想是聚焦变换。首先将阵列输出数据在时域上分成不重叠的若干段,然后分别对每段数据进行离散傅立叶变换,得到信号带宽内的多个频率点分量,通过聚焦变换将带宽内各个频率点下的信号子空间变换到参考频点下的同一个信号子空间,再利用窄带信号的子空间处理方法进行高分辨方位估计。相比于其他宽带目标方位估计算法,CSM算法的优点在于运算量相对小,可实现对相干信号的处理,估计精度高。 构造一个随频率变化的矩阵T(fj),将不同频率段的方向矩阵聚焦到同一参考频率f0下的方向矩阵,即: T(fj)A(fj,θ)=A(f0,θ) (8) 式中,T(fj)称为聚焦矩阵,f0称为聚焦频率。聚焦矩阵T(fj)将信号带宽内不同频率的阵列流型或信号子空间变换映射到同一参考频率f0上,使得宽带目标信号具有同一信号子空间。 用聚焦矩阵对宽带信号X(fj)进行线性变换,可得到聚焦后的阵列输出向量为 T(fj)X(fj)=T(fj)A(fj,θ)S(fj)+T(fj)N(fj) =A(f0,θ)S(fj)+T(fj)N(fj) (9) 可以看出,相干信号子空间算法的原理是引入聚焦矩阵对阵列信号X(fj)进行线性变换,使变换后的阵列信号的阵列流型A(f0,θ)不再随频率变化,起到了对信号子空间的聚焦作用。假设变换后的阵列信号向量为Y(fj),即: Y(fj)=T(fj)X(fj) (10) 则,变换后的fj上的阵列信号的相关矩阵为 RY(fj)=E[Y(fj)YH(fj)] =A(f0,θ)RS(fj)AH(f0,θ) +σ2T(fj)TH(fj) (11) 如果将信号的带宽分为J个窄子带,则J个窄子带上平均的相关矩阵为 (12) 式中 (13) (14) 令 (15) (16) 将式(15)、(16)代入式(12)可得到: RY=A(f0)RSAH(f0)+RN (17) 对矩阵(RY,RN)进行特征分解得到特征值λi,和对应的特征向量ei(i=1,…,M)。其中,li按降序排列。前P个较大的特征值对应的特征向量张成的空间为信号子空间,后M-P个较小的特征值对应的特征向量张成的空间为噪声子空间,即: ES=[e1,e2,…,eP] (18) EN=[eP+1,eP+2,…,eM] (19) 对应的MUSIC空间方位谱可以构造为 (20) 该方位谱的峰值所在位置即对应为目标方位的估计值。 仿真实验采用CSM_MUSIC法,其中CSM法的中心问题就是聚焦矩阵的设计,本实验采用需要预估角的聚焦矩阵RSS法(旋转信号子空间法) 4.1 仿真实验一(双亮点) 一半径为0.2m的8元均匀圆阵,考虑两个远场宽带不相关信号入射到基阵,宽带信号是零均值的高斯随机过程,带宽[20,10000]Hz,阵列噪声是零均值的高斯白噪声,信噪比均为5dB。亮点一坐标为[x=30,y=0,z=150]m,亮点二坐标为[x=60,y=0,z=150]m,两亮点之间的直线距离为30m。采样频率为30kHz,快拍数为30000,声速为1500m/s。 图1 目标亮点图 图2 三维空间谱 图1和图2,可以看出RSS聚焦法在低信噪比5dB的条件下,能分辨两个间距为30m的亮点。 4.2 仿真实验二(三亮点) 一个半径为0.2m的8元均匀圆阵,考虑三个远场宽带不相关信号入射到基阵,宽带信号是零均值的高斯随机过程,带宽[20,10000]Hz,阵列噪声是零均值的高斯白噪声,信噪比均为5dB,亮点一坐标为[x=-30,y=0,z=150]m,亮点二坐标为[x=0,y=0,z=150]m,亮点三坐标为[x=30,y=0,z=150]m,两两亮点之间的直线距离为30m。采样频率为30kHz,快拍数为30000,声速为1500m/s。 图3 目标亮点图 图4 三维空间谱 图3和图4,可以看出RSS聚焦法在低信噪比5dB的条件下,能分辨两两间距为30m的三个亮点。 水下被动声成像为水下目标探测分析提供了一种新思路,通过对它的深入研究可以更精确地分辨目标体以及其相关位置的特性,为水中兵器分辨真假目标提供有力的参考,对精确打击提供了技术支持。上述仿真实验证明,在低信噪比下,能分辨三个亮点,为真实分辨舰船实测噪声提供了有力的理论支撑。 [1] Hung H,Kaveh M.Focusing matrices for coherent signal-subspace processing[J].IEEE Trans.on ASSP,1988,36(8):1272-1281. [2] 陈娟.宽带信号DOA估计算法研究[D].哈尔滨:哈尔滨工程大学,2009. [3] Doron M A,Kaveh M.On Focusing Matrices for Wide-Band Array Processing[J].IEEE Trans.on SP,1992,40(6):1295-1302. [4] Harry L Van Trees.最优阵列处理技术[M].汤俊,等译.北京:清华大学出版社,2008. [5] 孙超.水下多传感器阵列信号处理[M].西安:西北工业大学出版社,2007. [6] 鄢社锋,马远良.传感器阵列波束优化设计应用[M].北京:科学出版社,2009. [7] Wang H,Kaveh M.Coherent signal-subspace processing for the detection and estimation of angles of arrival of multiple wide-band sources[J].IEEE Trans.on ASSP,1985,33(8):823-831. [8] 薄保林.宽带阵列信号DOA估计算法研究[D].西安:西安电子科技大学,2007. [9] 侯云山,黄建国,金勇.宽带信号方位估计的改进RSS方法[J].系统工程与电子技术,2010,32(1):1-4. [10] 郭永.MUSIC改进算法在DOA估计中的研究[D].南京:南京邮电大学,2009. Imaging of Ship Noise Based on Simulation Noise Signal WANG Xiao1SUN Chao2 (1.The 710 Research Institute of CSIC,Yichang 443003)(2.Northwestern Polytechnical University,Xi’an 710072) Depend on the radiation noise of three parts of the ship(the bow,the amidships,the ship stern),which has obviously different energy features,the ship is simplified to “two highlights” and “three highlights” model.On the basis of MUSIC method and the Coherent Signal-Subspace method,this paper gives the method of eight-unit circular array,that study on the two points imaging and three points imaging research of the ship simulation radiation noise.This method can distinguish different window positions perfectly,which can be seen from the result. passive acoustic imaging,MUSIC,coherent signal-subspace 2014年8月19日, 2014年9月27日 王笑,男,硕士研究生,研究方向:自导与引信仿真。孙超,女,教授,研究方向:水声信号处理。 TP391 10.3969/j.issn1672-9730.2015.02.0253 相干信号子空间法[2,8]
4 被动亮点成像仿真实验


5 结语