基于数学形态学的零件图像跟踪的研究
2015-03-15赵杰
赵 杰
(扬州高等职业技术学校, 江苏 扬州 225003)
基于数学形态学的零件图像跟踪的研究
赵 杰
(扬州高等职业技术学校, 江苏 扬州225003)
摘要:提出基于数学形态学的零件图像序列跟踪的方法。对零件图像序列采取二值处理并进行数学形态学的腐蚀、膨胀和区域填充处理。腐蚀处理使得图像中的目标缩小,用于消除背景噪声;膨胀处理使得腐蚀处理的图像中目标主体恢复原形;区域填充和与处理用于保持目标主体区域并突出图像的目标、消除背景噪声。提取零件图像序列目标的质心坐标,形成了运动轨迹,实现了零件图像序列的跟踪。
关键词:数学形态学;目标跟踪;腐蚀;膨胀;区域填充
图像的目标跟踪是成像系统跟随目标运动,使得成像系统获取的目标图像始终处于成像系统显示区域的中心附近。一般讲,图像的目标跟踪方法可以分为四类:基于区域跟踪,基于活动轮廓跟踪,基于特征跟踪和基于模型跟踪[1,2]。
基于区域跟踪算法需要动态地保持背景图像不变,从当前图像背景中提取检测运动目标图像。基于活动轮廓的跟踪算法是通过将目标轮廓线表示成边界轮廓并动态地修改这些轮廓来跟踪目标,该类算法其宗旨是直接提取目标形状,提供比基于区域算法更有效的目标表示,然而跟踪精度限制在轮廓级[3]。基于特征的跟踪算法是通过提取特征要素,在图像间使得结构匹配来实现目标的识别与跟踪,根据所选特征不同被分成基于全局特征算法、基于局部特征算法和基于依赖关系图算法三种。基于模型的跟踪算法主要是通过与目标模型投影匹配实现跟踪。
近年来,一些新的图像目标跟踪方法不断涌现。小波变换被广泛用于运动目标检测,基于人工神经网络的目标检测和跟踪方法也得到发展[4,5]。本文应用数学形态学的定义和算法,对序列图像进行减少或消除背景噪声的处理,提取零件图像序列目标的质心坐标,获取零件图像跟踪轨迹。
1序列图像质心坐标
1.1 序列图像
如图1所示,二值图像f(x,y)在t1时刻向右运动,在t2时刻移动到右边,这种连续运动的图像称为序列图像。
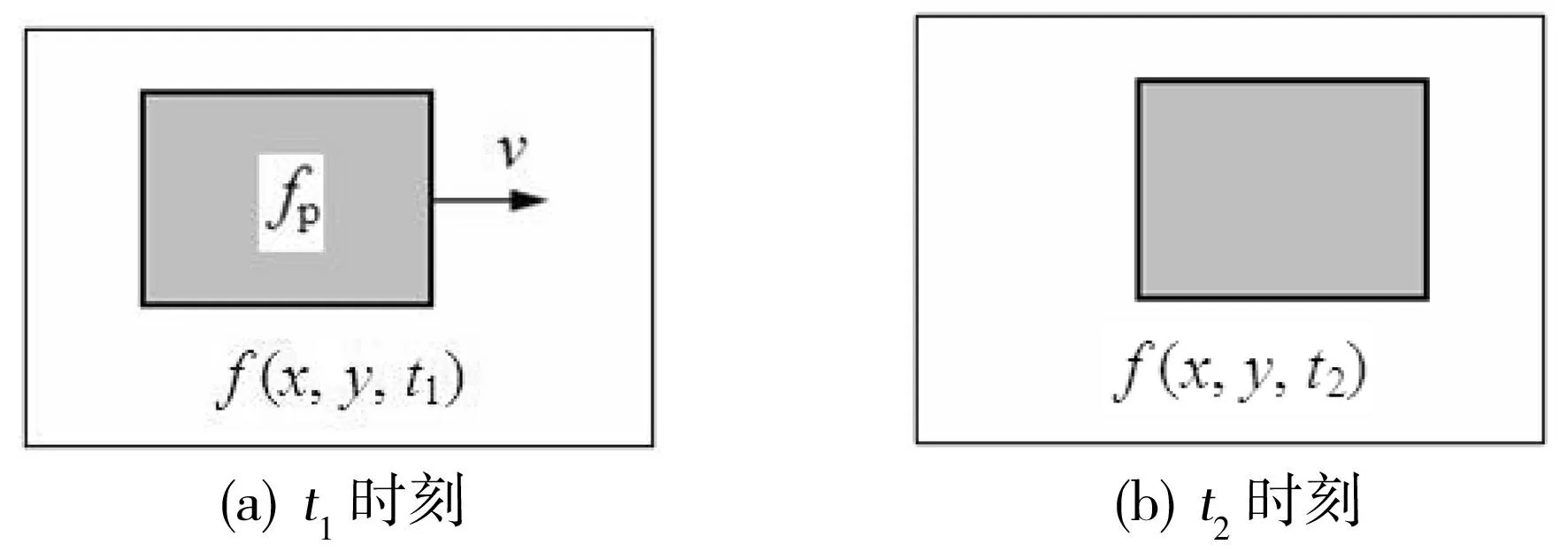
图1 序列图像
1.2 图像的质心坐标
定义二值图像f(x,y)的质量是所有像素的强度值之和,记为M。
(1)
式中,m、n为图像所占的二维空间区域的长度和宽度。
图像的质心坐标为

(2)
式中,X为图像质心的x方向的坐标、Y为图像质心的y方向的坐标。
通过计算连续相邻序列图像的质心坐标,可以获取连续相邻序列图像运动的轨迹的增量坐标Δx和Δy。

(3)
如图2所示,图像尺寸为8×6像素。图2(a)-图2(c)分别是t2-t1时刻、t3-t2时刻和t4-t3时刻的序列图像。可以计算出t2-t1时刻的差分图像的质心坐标为X=2.5、Y=2.5;t3-t2时刻的差分图像的质心坐标为X=4.5、Y=3.5;t4-t3时刻的差分图像的质心坐标为X=6.5、Y=4.5。
从图2(a)移动到图2(b),再移动到图2(c)的增量坐标为Δx=2、Δy=1;Δx=2、Δy=1,利用伺服驱动机构可以实现目标图像的跟踪。
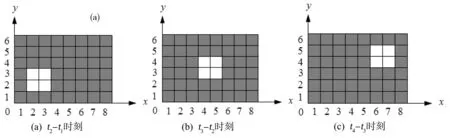
图2 图像尺寸为8×6像素的序列图像
2基于数学形态学的零件图像序列处理
应用数学形态学中的腐蚀、膨胀等基本定义和区域填充等算法,检测图像目标并获取目标的质心坐标以完成目标跟踪[6]。
2.1 数学形态学的基本定义与算法
数学形态学的基本定义和算法主要有腐蚀、膨胀、区域填充、凸壳、粗化和细化等。
2.1.1腐蚀
腐蚀的定义为
A⊖{x|(B)x⊆A}
(4)
式中,A为目标,B是结构元素,A⊖B表示A被B腐蚀,x为平移。
图3为腐蚀处理的示意图。图3(a)中的白色区域是目标,图3(b)表示白色区域被结构元素B腐蚀,白色区域缩小。

图3 腐蚀处理的示意图
2.1.2膨胀
膨胀的定义为

(5)

图4为膨胀处理的示意图。图4(a)中的白色区域是目标,图4(b)表示白色区域被结构元素B膨胀,白色区域扩大。

图4 膨胀处理的示意图
2.1.3区域填充
区域填充是从封闭的边界内的一个点开始,用1填充整个区域。
2.2 零件图像的形态学处理
图5(a)、图5(b)分别是在t1、t2时刻采集水平移动的发动机箱盖的图像。图5(a)、图5(b)经过二值化处理,得到如图5(c)和图5(d)所示的二值图像,可以看出,二值图像的背景噪声较大。利用式(2)和式(3)计算目标的质心坐标和轨迹坐标,会产生较大的误差。
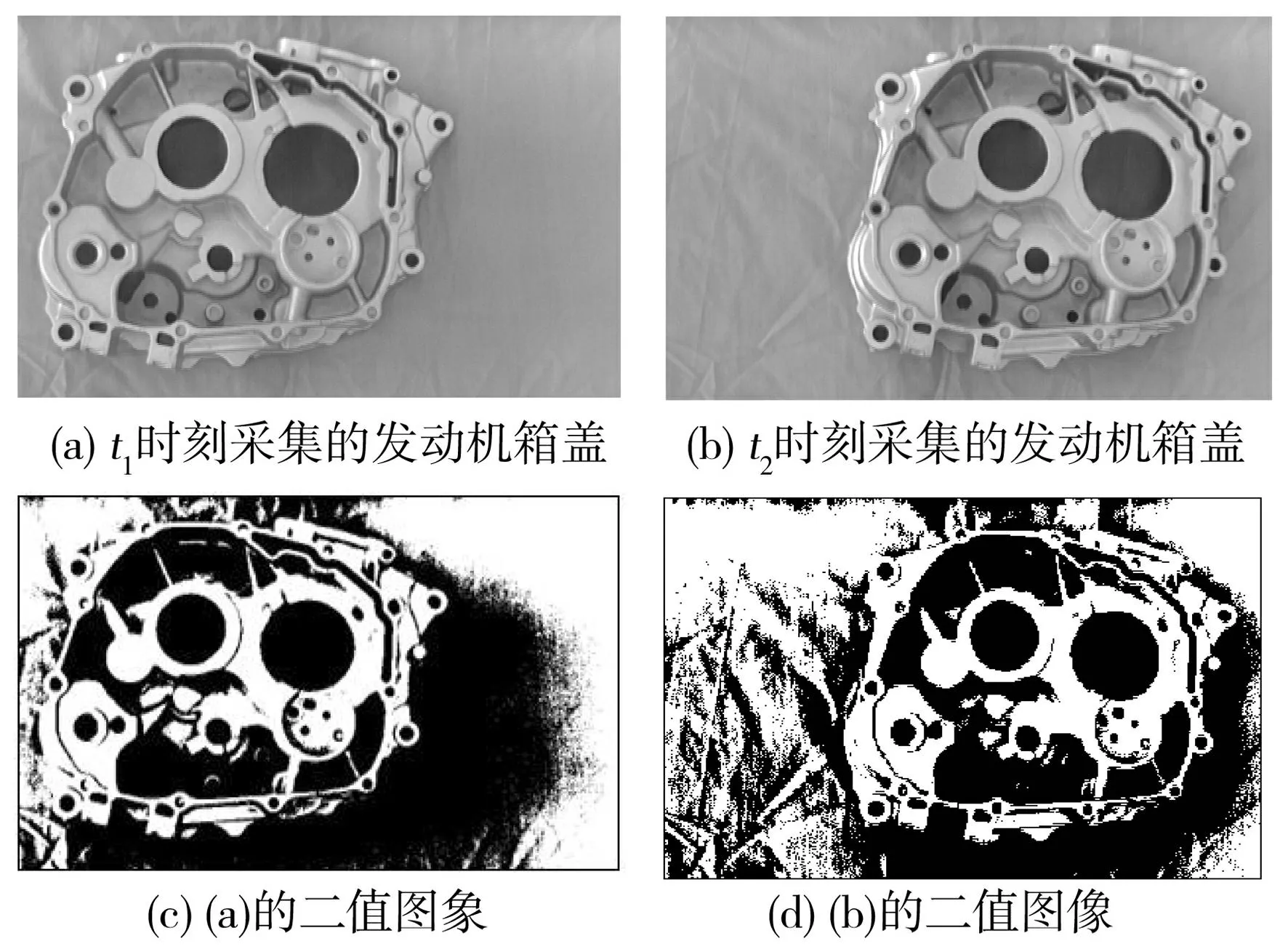
图5 零件图像和二值图像
利用形态学的腐蚀定义对图5(c)进行腐蚀处理,处理结果如图6(a)所示。腐蚀处理的结果除去了背景噪声,也减少了目标区域造成目标失真。利用形态学的膨胀定义对图6(a)进行目标恢复,结果如图6(b)所示。再利用形态学的区域填充算法将目标内黑色区域用1填充,使得目标区域内的像素值全部成为高像素值,见图6(c)。最后,将图6(c)和图5(a)作与处理,得到如图6(d)所示的目标。可以看出,图6(d)的背景全部消除。

图6 基于形态学的发动机箱盖图像的处理
2.3 计算质心坐标
将t2时刻的发动机箱盖图像作上述同样的处理,处理结果见图7。

图7 t2时刻发动机箱盖的图像处理结果
由式(1)、式(2)分别计算出图6(d)、图7的质心坐标为
X1=237Y1=255
X2=323Y2=254
如表1所示是等间隔采集水平匀速移动的箱盖图像并进行形态学处理,由式(1)、式(2)计算的部分质心坐标。表2是由式(3)计算的轨迹坐标Δx和Δy,实验结果表明发动机箱盖等间隔的水平移动基本是匀速的。连续采集运动零件的图像,可以不断得到零件图像的轨迹坐标。将轨迹坐标驱动伺服机构,可以完成运动目标的跟踪。

表1 质心坐标

表2 轨迹坐标Δx和Δy
3结语
数学形态学的基本定义和算法是图像处理的有效工具,可以较好地消除图像的背景,突出图像的目标,利用数学形态学去除图像的背景噪声是一种新意的方法。
结构元素尺寸的选取是腐蚀和膨胀处理的关键技术,结构元素尺寸过小,图像的背景和噪声难于清除;结构元素尺寸过大,可能无法得到可以进行区域填充的封闭区域。
计算图像的质心坐标和运动轨迹坐标是序列图像跟踪的重要技术,本文后续的实验是据轨迹坐标驱动伺服机构,以实现跟踪过程。
参考文献:
[1]MEIER T,NGUN K N.Video segmentation for content based coding[J].IEEE Trans on Circuits and Systems for Video Technology, 1999,9(8):1190-1203.
[2]JORGE B, BOBER M, PLA F. Motion and intensity based segmentation and its application to traffic monitoring[C]. International Conference on Image Analysis and Procesings ICIAP’97,Florence,Italy,1997.
[3]KASS M, WITKINM A,TERZOPOULOS D. Active contour models[J]. International Journal on Computer Vision, 1998,1(4):321-331.
[4]RAFAEL C G, RICHARD E W. 数字图像处理[M].2版.北京:电子工业出版社,2005.
[5]赵杰.基于Hilbert曲线和小波变换的图像分割[J].吉林工程技术师范学院学报,2013(1):77-80.
[6]盛党红,夏庆观.采用数学形态学的零件跟踪与LabVIEW识别研究[J].现代制造工程,2009(10):133-138.
(责任编辑:江涌吴萍)
Research on Parts Image Tracking Based on Mathematical Morphology
ZHAO Jie
(Yangzhou Higher Vocational & Technical School, Yangzhou 225003, China)
Abstract:The sequence tracking method of parts images based on mathematical morphology is presented in this paper. The sequence of parts image is taken binary processing and processed by the erosion, dilation, region filling of mathematical morphology. The erosion shrinks image which is used for sorting out background noise and dilation expands image. The image segmentation and filling processing are performed so that the target region can be perfectly extracted. The centroid locus of moving part images is obtained, the moving part is formed and the tracking of parts image sequence is achieved.
Key words:mathematical morphology; target tracking; erosion; dilation; region filling
中图分类号:TP 391.41
文献标识码:A
文章编号:1008-3693(2015)04-0044-04
作者简介:赵杰(1972—),男,扬州高等职业技术学校电子工程系教授。
收稿日期:2015-10-14
