基于舰炮光电测偏设备的数据处理与校准方法研究*
2015-03-14黄金涛杨绍清刘松涛
黄金涛 杨绍清 刘松涛
(1.海军大连舰艇学院研究生管理大队 大连 116018)(2.海军大连舰艇学院舰炮系 大连 116018) (3.海军大连舰艇学院信息作战系 大连 116018)
基于舰炮光电测偏设备的数据处理与校准方法研究*
黄金涛1杨绍清2刘松涛3
(1.海军大连舰艇学院研究生管理大队 大连 116018)(2.海军大连舰艇学院舰炮系 大连 116018) (3.海军大连舰艇学院信息作战系 大连 116018)
弹着方位偏差的测量与校正是提高舰炮武器系统作战效能的重要手段,其测量精度取决于光电偏差测量设备的内参数,因此如何准确地获取光电测量设备的内参数对于提高舰炮武器系统的作战效能至关重要。论文利用高精度经纬仪对校准靶标进行数据测量,对获得的高精度测偏校准数据进行一系列的误差分析和处理,最后利用处理后得到的标准校准数据对实际光电设备的相关内参数进行了实际校准。仿真验证结果表明论文给出的方法简单、精度高,是一种非常实用的方法,对光电设备角度偏差测量具有很好的参考价值。
方位偏差; 光电测偏; 校准靶标
Class Number TJ391
1 引言
现代化高技术条件下的海战,要求舰炮武器系统必须保证较高的射击精度。而武器本身要精确地命中目标,依赖于整个系统中各部分的技术性能,而系统的角度零位一致性检查是系统试验、使用过程中一项重要的基础性工作,是舰炮武器系统精确探测、跟踪目标,进行精确火控解算,准确打击目标的前提和基础。本文以舰炮射击为基础,研究如何有效地获取光电测偏设备的内参数,提高瞄准射击精度,优化舰炮系统,提高武器系统整体作战效能。
2 光电测量在特性参数测量方面的作用分析
光电测量系统用于对飞行目标的红外辐射特性、火焰光谱和发光亮度等光学物理特性残素测量。其主要提供目标图像和位置信息。前者是实时记录的整个或部分目标的外形、形态及亮度的空间分布等;后者主要用于自动跟踪捕获和实时测偏,而脱靶量测量是图像测偏技术中的关键技术。
2.1 面阵CCD摄像机图像传感脱靶测量的工作机理
所用的摄像器件不同,图像测偏的原理也略有差异。一般面阵CCD常采用凝视测量方式,即物—像空间直接对应方式。本文所选用的舰艇光电跟踪仪采用的是较为先进的CCD摄像机。如图1所示,CCD摄像机光学系统将目标物体的像成像在CCD靶面上(CCD靶面安置在光学望远镜的像面上),CCD将整个视场内(含背景)灰度进行光-电子转换,并进行电荷积累。当一场或一帧积累期满后,通过时钟控制,将电荷图像转换成与时间有关的电信号。信号放大后,将模拟信号转换成数字图像,对灰度进行量化处理以获取所需要的脱靶量信息。
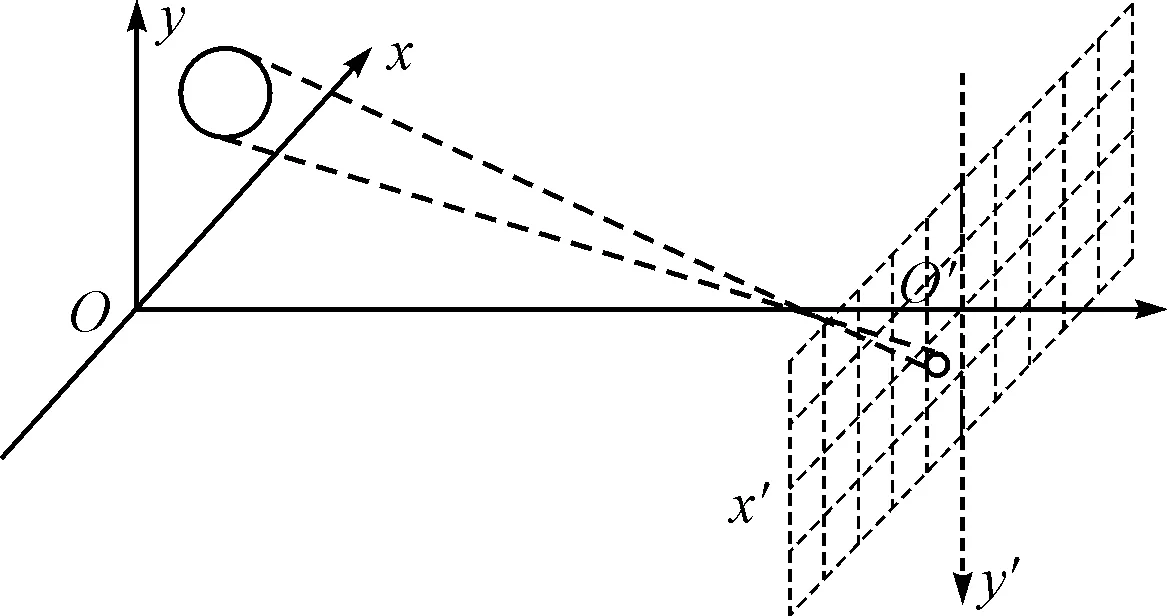
图1 CCD物—像关系图

图2 计算目标脱靶量示意图
图2为计算目标脱靶量示意图,目标脱靶量的计算就是分别计算出目标的行中心和场中心。
视场中的目标被波门套上后,存入目标的特征值,处理后统计出目标最前沿附近的数值和最后沿附近的数值,再进行求和运算,便可获得目标中心x方向上的脱靶量为
(1)
式中:i为行数,j为像素数。
按数学象限赋予脱靶量的符号,行方向左半行为负值,右半行为正值,下半场为负值。
同理可获取目标中心y方向的脱靶量Y。
在求得CCD靶面上以像素为单位的脱靶量后,要根据CCD的成像原理,将其转换为实际的脱靶量,才能进行后续工作。假设在空间几千米甚至几万米的光轴外,如图3(a)所示,有一目标点A1,它在CCD靶面上的成像为点B1,则A0A1即为实际脱靶量。由相似三角形的性质可知:
(2)
式中:OA0为目标距透镜的水平距离,可由测距装置测得;OB0为透镜距CCD靶面的距离;B0B1为CCD靶面上脱靶量的象素数与象元长度的乘积。故可得出实际脱靶量A0A1的值。
同理,由式(1)和式(2)得出的在靶面上的脱靶量X和Y,也可以得出实际脱靶量A0Ax和A0Ay的值。
(3)
式中:OA0为目标距透镜的水平距离,可由测距装置测得;l为透镜距CCD靶面的距离;Δx为CCD靶面上水平方向脱靶量的象素数与象元长度的乘积,Δy为CCD靶面上垂直脱靶量的象素数与象元长度的乘积。故可得出实际的水平脱靶量A0Ax和垂直脱靶量A0Ay的值,如图3(b)。
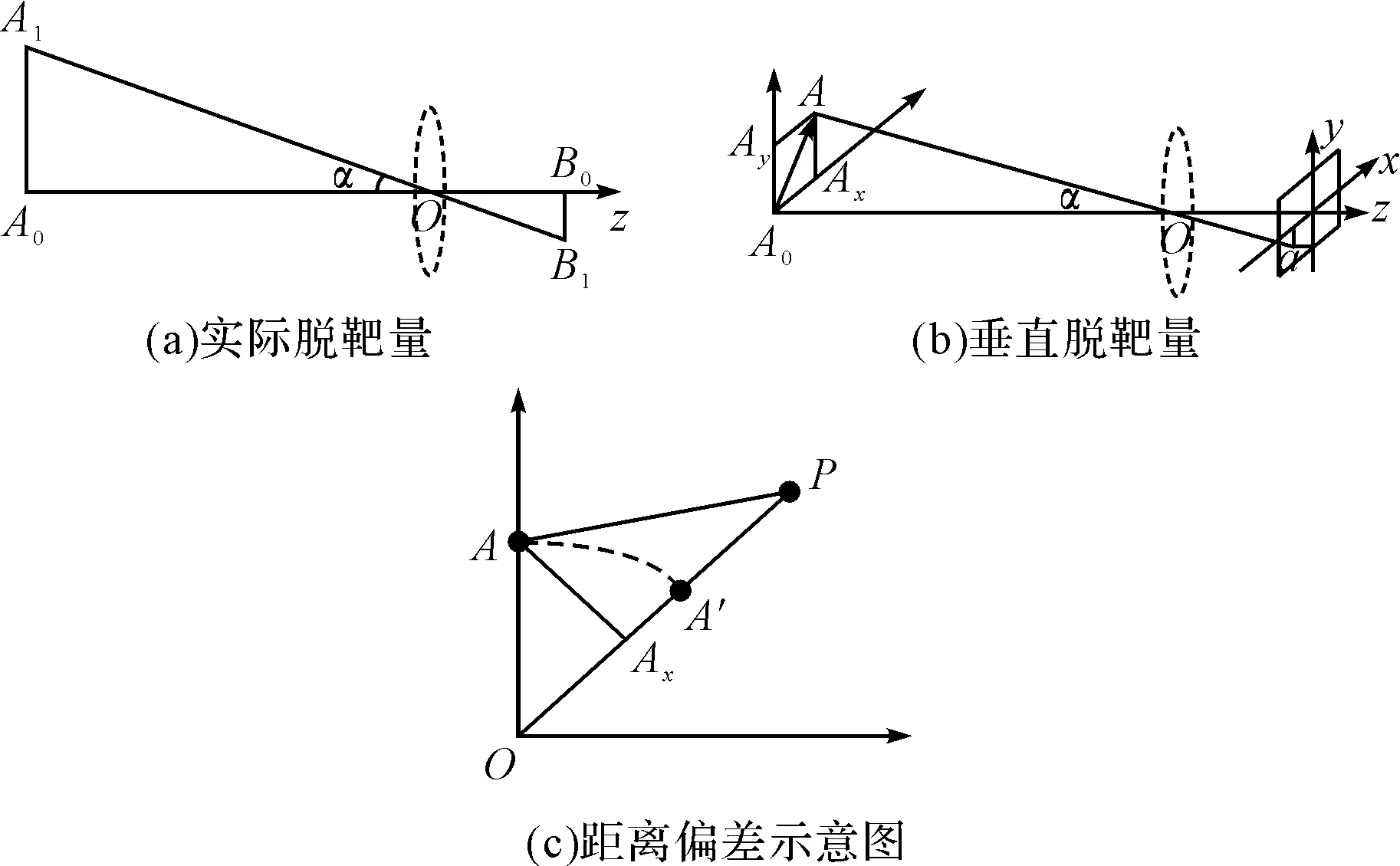
图3 CCD成像原理图
经光电跟踪仪对目标与弹着点进行激光测距,测得距离分别为OA和OP。A′点为OP直线上距O点的距离与A点相等的点,A′P即为距离上的偏差量,如图3(c)。其值可由下式得出:
A′P=OP-OA
(4)
在基于光电的闭环校射系统中,火控计算机记录水平偏差AAx和距离偏差A′P的数值,并通过分析数据的统计特性,经过估计和预测即将发射的弹丸的脱靶量,求得校正量。然后将校正后的射击诸元,输入到火控计算机中,从而达到校射的目的。
2.2 舰炮武器系统校射的方法
先在炮口安装一个炮口适配器,保证适配杆的轴线与炮管轴线相一致。再将一望远镜套装在适配管上。望远摄像机通过适配座,套装在适配杆上时,可自动保证摄像机光轴与适配杆轴线一致。进而保证摄像机光轴与炮管轴线一致。由于观测的目标距离较远,故监视器与炮基的距离可忽略。在零飞的工作方式下,当跟踪器锁定目标后,跟踪器的光轴应该与炮管轴线相平行,同时对准目标。但是由于传递系统存在误差,所以炮管的轴线并不指向目标的中心,即目标在监视器上的成像并不在图像的中央,如图4所示。
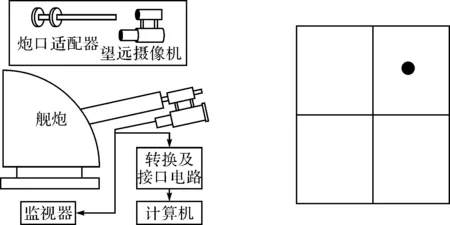
图4 目标在监视器上的成像

图5 CCD的成像原理
要修正这个误差,即是要分别修正高低角和方位角。修正角度的大小可由CCD的成像原理得出。如图5所示,凸透镜与CCD之间的距离已知,目标成像点与CCD中心点的距离可知,故偏移角度a可以求出,故可以根据得出的偏移角度a来修正误差。
精确测量舰炮武器系统动态误差一直是比较困难的问题,目前多采用火控计算机按设计好的参数模拟目标航路数据,计算舰炮瞄准诸元,通过随动系统驱动舰炮跟踪瞄准,再将经传感器反馈回来的舰炮方向角和高低角与保存在EPROM中的标准结果相比较,求出动态误差、均值和均方差。由于观测跟踪装置没参加检测,未构成闭环,所以称其为半系统动态模拟检查。下面研究的检测方法检测的是整个系统的动态误差,系统所有装置均参加工作,要求观测跟踪装置跟踪瞄准指定运动目标,火控计算机工作于“零飞”工作方式,由专用的检测系统检测录取舰炮瞄准诸元的动态误差,计算动态误差的均值和均方差。
3 光电实测数据处理与误差校准

图6 流程图
实验过程中对一面铺设长方形墙砖的墙面,选取其中13×16块墙砖的一部分墙面作为观测标校靶,用光电经纬仪对其进行测量。主要是使用经纬仪对实际测量得到的数据进行相关处理,继而研究光电侧偏校准方法。其主要工作流程图如图6所示。
3.1 校准数据的获取与弧度转换
使用经纬仪测量记录观测标校靶各位点水平角和高低角数据,其实际测量分为横线测量和竖线测量两种测量,每次测量有两组,一组为顺时针测量,另一组为逆时针测量。在横向测量全测的情况下,竖线测量三组数据。在数据处理的时候,对不同方向测得的数据求取平均值,这样获得的测量值就有效地消除了仪器的回程误差,使测量的结果更加准确。
为了简化数据处理,根据已知角度和弧度的转换公式:rad=θ/π,将测得的度、分、秒角度数据分别转换为弧度值,然后相加得到弧度值结果。继而将数据变成矩阵。
3.2 数据方位基准与高低基准的处理
每一条横线是在一次测量中完成的,每一条竖线也是在一次测量中完成的,但是不同的横线或竖线是在不同次的测量中完成的。因为每次测量时经纬仪摆放的位置存在着微小的误差,所以不同次测量得到的数据基准不统一,接下来就要对数据进行处理,使数据的基准统一。
利用加权平均法计算误差值:
(5)
(6)
竖线测量结果中的数据在同一次测量中完成,得到的数据基准统一。提取横线测量结果中y=1、y=6、y=13的三组数据分别与竖线测量结果中相应的数据做差,分别得到三组水平角、高低角的差值对三组数据求平均值,再分别求两组数据的平均值,此时如果反复使用加权平均法进行计算来消除误差,数据的精度会不断提高,因为该测量数据的误差较小,所以在不影响理论研究的情况下,只进行了一次平均值计算,然后将得到基准误差的值。
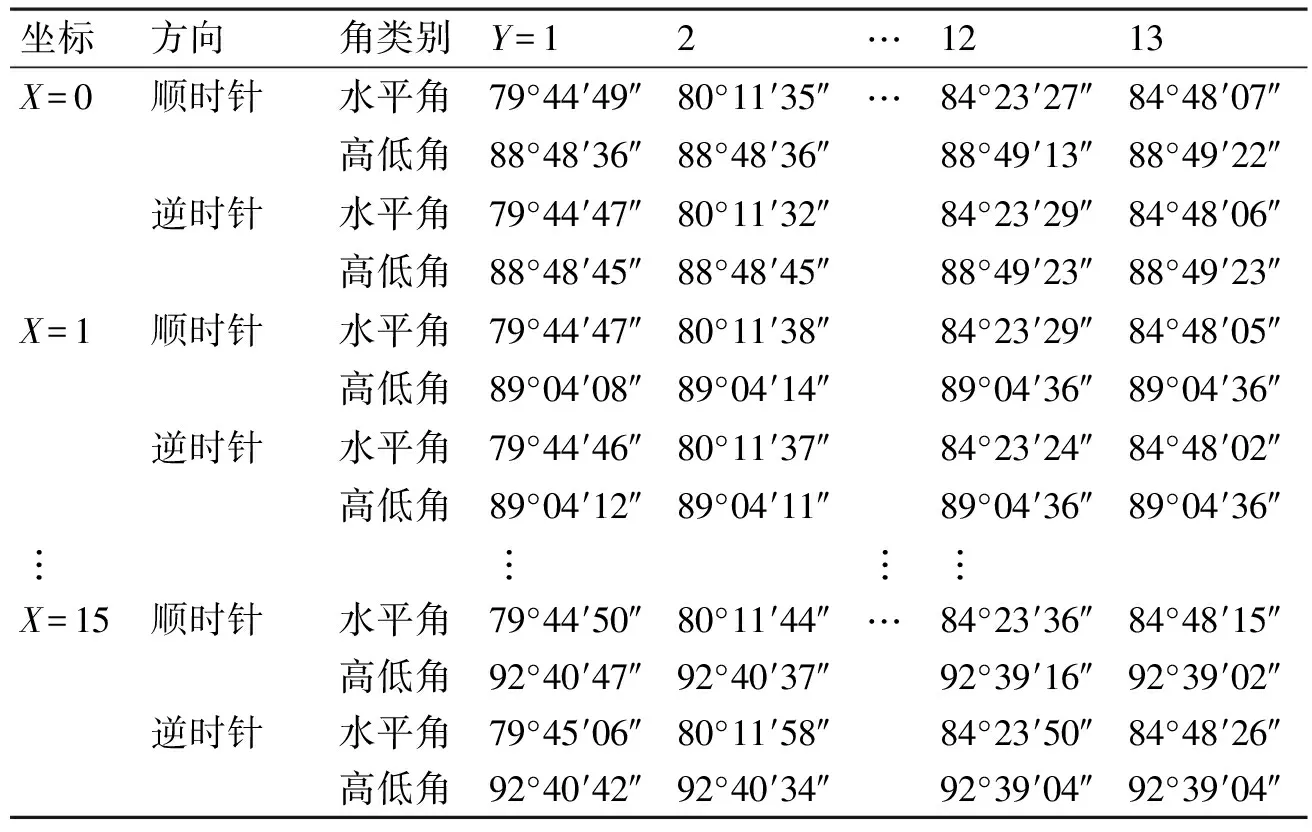
表1 横线测量

表2 竖线测量
水平角的基准差值Y′=0.671265mrad
高低角的平均差值X′=-0.041613mrad
然后将得到的水平角、高低角的平均差值补偿到之前得到的横线测量结果表中得到最终数据表格。
X=Xn+X′Y=Yn+Y′
(7)
为了能够更简便、精准地实现校准的功能,对已误差补偿的数据进行数据中心化处理。在第13列、16行的表格中选取第7列、8行为中心点(零点),其他位点数据均与零点数据做差。
X″=Xn-X基准Y″=Yn-Y基准
(8)
表1、表2给出的是校准表中的一部分数据,这张校准表上的每一组数据,对应如图的每一个交点。以x=8,y=7为零点,图上的每一个交点都有一个与之相对应的水平角、高低角弧度值数组。将校准表中的全部数据输入Matlab中,绘图程序生成一幅描绘各坐标点的图片;得到的图片,就是将观测标校靶中的各个焦点筛选出来所构成的。

图7 x-y校准靶
4 实际光电测偏设备的校准
4.1 校准方法步骤
在光学仪器中,以光学仪器的镜头为顶点,以被测的物象可通过镜头的最大范围的两条边缘构成的夹角,称为视场角。利用视场角校准光电设备。
1) 图像数据信息的获得:使用sobel算法对图像进行二值化处理,以获取图像内方格信息。已知光电测偏设备的ccd的分辨率为1280、768,镜头焦距分为三种:长焦距、中焦距和短焦距。
2) 根据第2节计算校准靶的视场角:水平方向即两条竖直边缘水平角差值的绝对值,竖直方向即上下两条水平边缘的高低角差值的绝对值。得:
水平视场角A=88.229mrad
竖直视场角B=67.253mrad
3) 在第2节中的数据处理得到了16*13个墙面方块的视场角的弧度值,所以每一方块的水平角和高低角分别为
(9)
得到:α=6.786mrad,β=4.203mrad
4) 实际操作,现在使用一台不知道内参数的相机替代光电经纬仪,在同一位置分别使用三种不同的焦距情对同一面墙拍照,得到三幅不同的图像,分别对其进行分析。
已知每一个方块的水平角与高低角的弧度值就可以计算出相机在三种不同焦距情况下拍照时的视场角。
4.2 短中长焦距情况下的校准
将不同焦距图片读入Matlab,通过程序得到其数据信息:长m有1024个像素点,宽n有768个像素点。
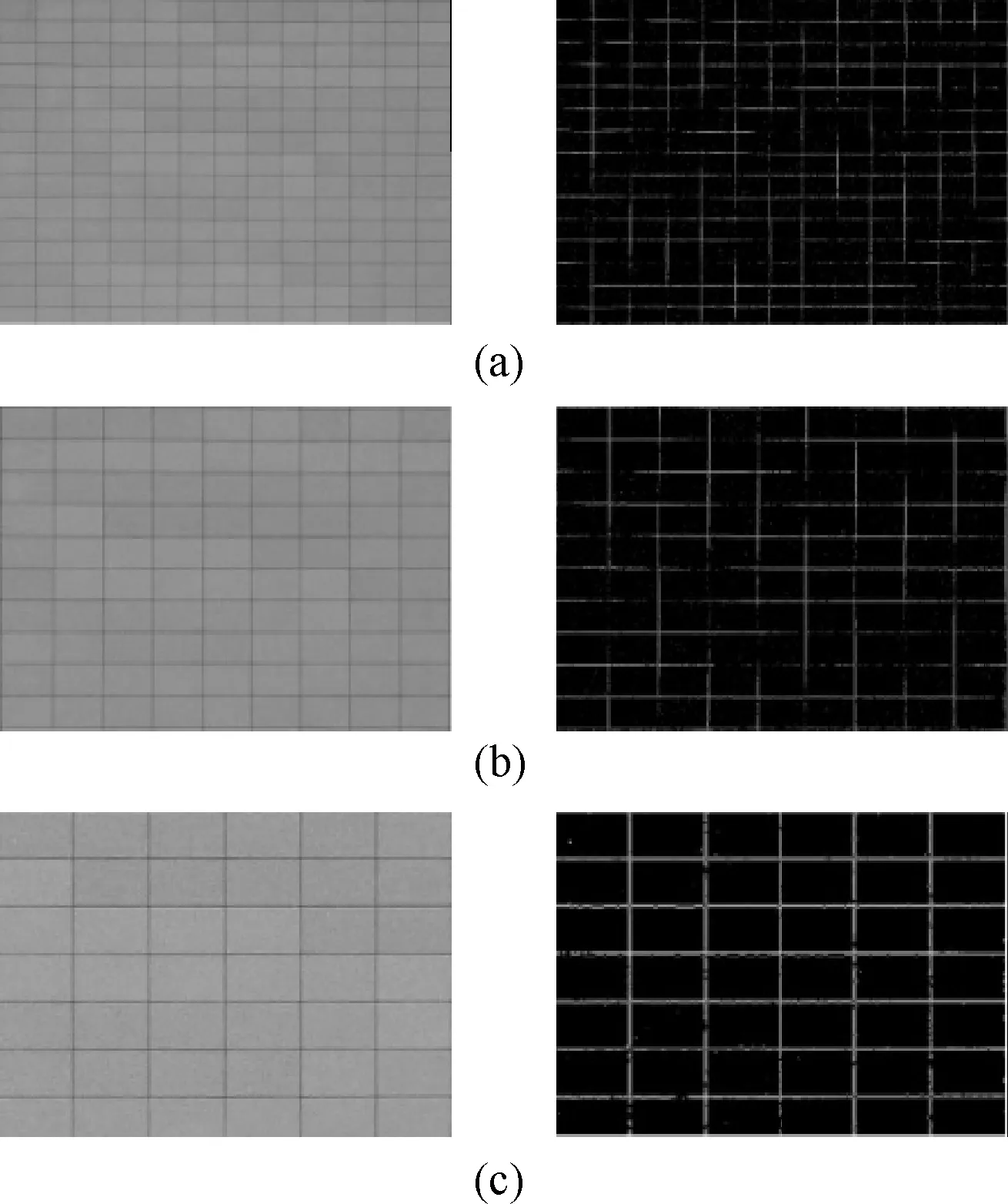
图8 短、中、长焦距情况下的测量
利用Matlab对图像进行处理后得到其对应二值图像。通过方块的个数计算其视场角:其短中长焦距情况下水平方向分别有13、9、6个方块,竖直方向分别有16、10、7个方块,所以:

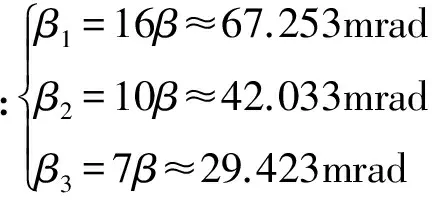
分别为短中长焦距下相机的视场角。其每一个像素点的弧度值分别为:水平角分别为0.1149mrad、0.0795mrad、0.0530mrad;高低角分别为0.0657mrad、0.0410mrad、0.0287mrad。
通过上述的实践得出结论,这种校准方法能够快速、方便地测出光电设备所生成图像中各点的位置,可以实现光电测偏与校准。
5 结语
论文给合当前光电测量以及图像处理领域所取得的成果,对光电测偏校准方法进行了研究,结合本单位的光电测量仪器,实际测量并获取了测量数据,对光电测偏校准方法研究进行了初步探讨,同时也对舰炮武器系统测偏校准提供借鉴和参考。
[1] 郭迎福,王文温一种简便的单目CCD摄像机标定万法[J].实验室研究与探索,2009(6):68-70.
[2] 段瑞玲,李庆祥,李玉和.图像边缘检测方法研究综述[J].光学技术,2005(5):11-14.
[3] 万德安,张剑.CCD双目视觉测量系统结构参数设置的理论研究[J].机械设计与制造,2001(5):21-24.
[4] J. B. Liao, M. H. Wu. A coordinate measuring machine vision system[J]. Computers in Industry,1999(6):32-36.
[5] 孙兆林.Matlab6.x图像处理[M].北京:清华大学出版社,2002.
[6] 付光远.一种基于Sobel分析算子的图像边缘检测并行算法[D].西安:第二炮兵工程学院,2006:23-26.
[7] 韩庆龙,曲兴华,张福民.新的大尺寸截而配对式视觉测量方法的研究[J].计算机测量与控制,2009:62-66.
[8] Ge Dongyuan, Yao Xifan, Li Kainan. Calibration of binocular stereo-vision system[J]. Machinery Design & Manufacture,2010(6):188-189.
[9] 吕俊伟,何友金,韩艳丽.光电跟踪测量原理[M].北京:国防工业出版社,2010:1-5.
[10] 程树昌.舰炮打靶模拟训练系统的设计与实现[J].海军大连舰艇学院学报,2002(1):23-122.
Data Processing and the Calibration Method of Partial Equipment Based on the Naval Gun Photoelectric Measurement
HUANG Jintao1YANG Shaoqing2LIU Songtao3
(1. Department of Graduate Management, Dalian Naval Academy, Dalian 116018) (2. Department of Naval Gun, Dalian Naval Academy, Dalian 116018) (3. Department of Information Operations, Dalian Naval Academy, Dalian 116018)
Measurement and calibration impact bearing deviation is important means to improve the naval gun weapon system operational effectiveness, while its measuring accuracy depends on parameters of photoelectronic deflection measurement equipment. So how to accurately obtain the parameters of photoelectric measuring equipment in improving the operational effectiveness of naval gun weapon system is very critical.This paper uses high-precision theodolite to take actual measurements for calibration targets, analyzes and deals with the calibration data of a series of high precision measurement error obtained. Finally the standard calibration data obtained after the processing is used to carry out the calibration of the the relevant parameters within actual photoelectric equipment. Simulation results show that the proposed method is very practical means for the simple and high-precision features ,demonstrating its wally reference value in angular deviation measurement of photoelectric equipment.
azimuth deviation, photoelectric measuring partial, calibration target
2015年3月1日,
2015年4月17日
黄金涛,男,硕士研究生,研究方向:图像处理。
TJ391
10.3969/j.issn.1672-9730.2015.09.041
