水面舰艇采用不同规避方式对潜射声自导鱼雷命中概率影响研究*
2015-03-14赵向涛
闫 岩 赵向涛
(海军大连舰艇学院 大连 116018)
水面舰艇采用不同规避方式对潜射声自导鱼雷命中概率影响研究*
闫 岩 赵向涛
(海军大连舰艇学院 大连 116018)
以潜艇使用声自导鱼雷对舰艇鱼雷攻击为例,围绕分析舰艇机动规避对鱼雷命中概率的影响这一主线进行了鱼雷弹道、鱼雷机动、舰艇机动等模型的构建,通过采用蒙特卡洛方法仿真计算并定量分析结果,优选了舰艇在不同对抗态势下的机动规避方式,阐述了舰艇规避方法与对抗器材结合使用时应注意的时机,为更好发挥其在鱼雷防御作战中的作用提供理论参考。
声自导鱼雷; 机动规避; 鱼雷防御; 命中概率
Class Number TJ631.5; E833
1 引言
潜射反舰声自导鱼雷自诞生起就对水面舰艇的生存构成了巨大威胁,其具有高航速、远航程、射击阵位广、可发射后不管等战术使用特点[1],是潜艇对舰鱼雷攻击的一种有效武器。实战背景下,舰艇一旦鱼雷报警,必将采用多种手段对来袭鱼雷进行防御,尽管多种对抗器材已被广泛采用,但通过变向、变速机动规避仍是舰艇对抗鱼雷的基本策略[2]。究其原因: 1) 伴随鱼雷航程的大幅增加,潜艇能在更远的距离对敌发起攻击的同时也给舰艇预警来袭鱼雷并对其实施机动规避和施放对抗器材提供了更多的机会; 2) 潜艇鱼雷射击的控制一般是以假设目标做等速、等向运动为前提,按照相遇原理,鱼雷发射后按照预先设定的航向直航接近目标,期望采用设定的速度和自导方式在预定的相遇点发现或命中目标[3]。对舰艇而言,机动对抗的结果会改变二者的相对态势而使其迅速脱离鱼雷搜索范围,破坏鱼雷射击应有的相遇条件而影响其射击效果; 3) 无论对抗器材如何发展,目前舰艇对鱼雷的防御一般都要遵循机动规避与使用对抗器材相结合对来袭鱼雷进行干扰或拦截[4]。因此,研究机动规避的方法对舰艇鱼雷防御作战具有较强的实际意义。
本文在模拟潜艇使用声自导鱼雷对采用不同规避方式的舰艇进行鱼雷攻击的作战态势基础之上,建立了相关模型,通过分析舰艇不同规避方式对鱼雷命中概率的影响,阐述了舰艇规避方法在不同对抗态势下的运用和其与对抗器材相结合使用抗击鱼雷的时机。
2 作战态势及数学模型
2.1 作战态势描述
如图1,潜艇对舰艇探测跟踪并解算和装订鱼雷的射击参数后于T时刻在有利射击阵位O点对处于M点的舰艇使用声自导鱼雷进行单雷射击,此时目标距离Dm,方位Bm,目标舷角Qm,攻击提前角φω。鱼雷出管后直航接近,自导开机后进入直航搜索弹道,被动自导,发现舰艇经确认即转入跟踪。若鱼雷到达预定相遇点N时没有发现舰艇则转入角速度ω的环形弹道搜索,发现重新转入跟踪;若不能发现,鱼雷以环形搜索弹道航行至航程耗尽[1,5~6]。T时刻M点的舰艇以航速Vm直航,当航行至M1点时,如果航行至P点的鱼雷进入其声纳报警范围(Ds,Qs),则舰艇依据报警要素采取以下规避方式进行机动。
方式1):保持原航向低速机动;方式2):加速转向将鱼雷置于舰尾一定舷角后高速机动[7~8];方式3):先加速转向置鱼雷于舰尾一定舷角航行几分钟,再继续转向以低速脱离。

图1 潜艇对舰艇鱼雷攻击作战态势示意图(舰艇分别采用三种方式机动规避)
2.2 数学模型
如图2,依据图1建立直角坐标系,以鱼雷出管位置O为坐标原点,y轴正方向北(取为0°),x轴正方向东,顺时针方向为航向角增大方向。舰艇初始方位Bm,舷角Qm。

图2 潜艇对舰艇鱼雷攻击坐标系(舰艇分别采用三种方式机动规避)
2.2.1 鱼雷直航搜索运动模型
任意t时刻鱼雷位置坐标:
(1)
式中:xt(t-1),yt(t-1)是上一时刻鱼雷位置坐标;Vt是鱼雷航速;Ct是鱼雷航向;Δt是仿真计算步长。
2.2.2 舰艇巡航运动模型
舰艇初始位置坐标:
(2)
任意t时刻舰艇位置坐标:
(3)
式中:xm(t-1),ym(t-1)是上一时刻舰艇位置坐标;Vm是舰艇航速,Cm是舰艇航向;Δt是仿真计算步长。
2.2.3 鱼雷旋回搜索与舰艇旋回机动模型
如图3,用鱼雷旋回搜索为例说明,以鱼雷开始旋回搜索时的位置为坐标原点,其搜索主航向为x轴正方向建立坐标系,鱼雷向左或向右环形搜索。

图3 鱼雷旋回弹道示意图
则鱼雷旋回搜索时位置坐标:
(4)
式中:Ct是任意t时刻鱼雷航向;xt,yt是任意t时刻鱼雷位置坐标;ωt是鱼雷旋回角速度;Rt是鱼雷旋回半径;Vt是鱼雷航速;Δt是仿真计算步长。同理可得任意t时刻机动旋回的舰艇位置坐标。
2.2.4 鱼雷与舰艇的位置关系
任意t时刻鱼雷与舰艇的距离:
(5)
任意t时刻舰艇相对鱼雷的方位[9]:
(6)
任意t时刻舰艇相对鱼雷的舷角:
Qtm=Btm-Ct(t),Qtm∈[-π,π]
(7)
2.2.5 舰艇旋回后运动模型
参照式(6)和式(7)可得任意t时刻鱼雷相对舰艇的方位Bmt和舷角Qmt,则舰艇旋回后航向:

(8)
式中:θm是舰艇规避航向与来袭鱼雷方位之间夹角,若鱼雷位于舰艇右舷取负,反之取反。舰艇位置坐标可参照式(3)。
2.2.6 鱼雷捕获及命中判断模型
1) 被动声纳方程[10~11]:
DTt=SL(Vm)+10logF(Qmt)-TL(Di)
+10logG(Qtm)-(NL(Ht)-DI)
(9)
式中:SL(Vm)是舰艇辐射声源级;TL(Di)是传播损失;NL(Ht)是鱼雷干扰噪声级;G(Qtm)是鱼雷自导接收波束方向性函数;F(Qmt)是舰艇噪声声压分布系数[12];DI是鱼雷声纳接收机增益;Di是鱼雷-舰艇间距离;Ht是鱼雷航行深度。
2) 鱼雷捕获及命中判断
设鱼雷自导扇面的半角是λ,声纳接收机检测阈是DT0,若式
(10)
成立,则判定鱼雷捕获舰艇,当鱼雷与舰艇的距离小于30m时,则判定鱼雷命中舰艇。
2.2.7 鱼雷命中概率统计计算模型
假设潜艇使用声自导鱼雷对舰艇进行多次射击,舰艇可能等速直航,也可能声纳报警进行规避,若鱼雷在N次射击中命中舰艇M次,依据模拟法的基本原理[12],鱼雷的命中概率P:
(11)
潜艇鱼雷攻击射击条件各项参数的误差服从正态分布,实际值是:
(12)
式中:Zn是各参数的观察值;σi是标准正态分布随机数;δn是给定的误差均方差。
3 仿真参数设定
3.1 舰艇机动及相关参数
舰艇初始方位45°,巡航航速取14kn~30kn,以4kn一个间隔,机动规避航速12kn~30kn,旋回角速度1°/s~2°/s。报警舷角30°~150°,报警距离1500m~6500m[13]。
3.2 鱼雷机动及相关参数
鱼雷航速45kn,自导扇面角90°,旋回角速度4°/s~8°/s,声纳接收机检测阈5dB,声纳接收机增益30dB,声纳接收机中心频率30kHz。
3.3 误差设定
潜艇鱼雷攻击各项参数误差的假设如表1所示。

表1 鱼雷攻击参数误差表
3.4 鱼雷自导逻辑假设
依据文献[6,14~15],对鱼雷弹道做出如下设定:
1) 鱼雷发射后以某一主航向直航搜索,自导采用波束扫描;
2) 鱼雷发现目标并经确认后对舰艇进行跟踪;若在跟踪阶段丢失目标信号,鱼雷进行再搜索,弹道设定为定深直航+旋回再搜索;
3) 鱼雷直航搜索在到达与目标的预定相遇点后没有发现目标,直接转入旋回搜索直至重新捕获或航程耗尽;
4) 鱼雷定距跟踪阶段丢失目标,先保持一个极短时间的直航,如果能接收到回波信号,则重新转入定距跟踪,否则开始旋回再搜索;
5) 若鱼雷航程耗尽或舰艇被命中,计为鱼雷一次攻击结束。
4 仿真计算及分析
4.1 仿真思路
仿真设定潜艇在不同发射阵位对不同目标距离、舷角和航速的舰艇进行攻击。目标距离2000m~7000m,以1000m一个间隔,目标舷角30°~150°,以30°一个间隔,舰艇机动规避按前文所述三种方式,按方式(2)和(3)规避时置鱼雷于舰尾120°~170°舷角。通过对鱼雷和舰艇相对抗的多种不同态势进行逐一仿真,每一态势仿真300次,进而分析舰艇每一种规避方式在对应每一种态势下对鱼雷命中概率的影响,从中优选舰艇规避方法。
4.2 仿真结果及分析
1) 近距离、小舷角态势下,低航速舰艇采用不同规避方式对鱼雷攻击效果的影响
图4和图5分别是潜艇在目标距离3000m,目标舷角60°,舰艇巡航速度18kn的态势下对采用方式(1)和(2)机动规避的舰艇鱼雷攻击的部分次数仿真图,仿真结果如表2所示(鉴于仿真数据量较大,取典型态势部分数据说明,其中P1、P2、P3分别是潜艇在不同阵位对采用前述三种规避方式进行机动的舰艇鱼雷攻击的命中概率)。
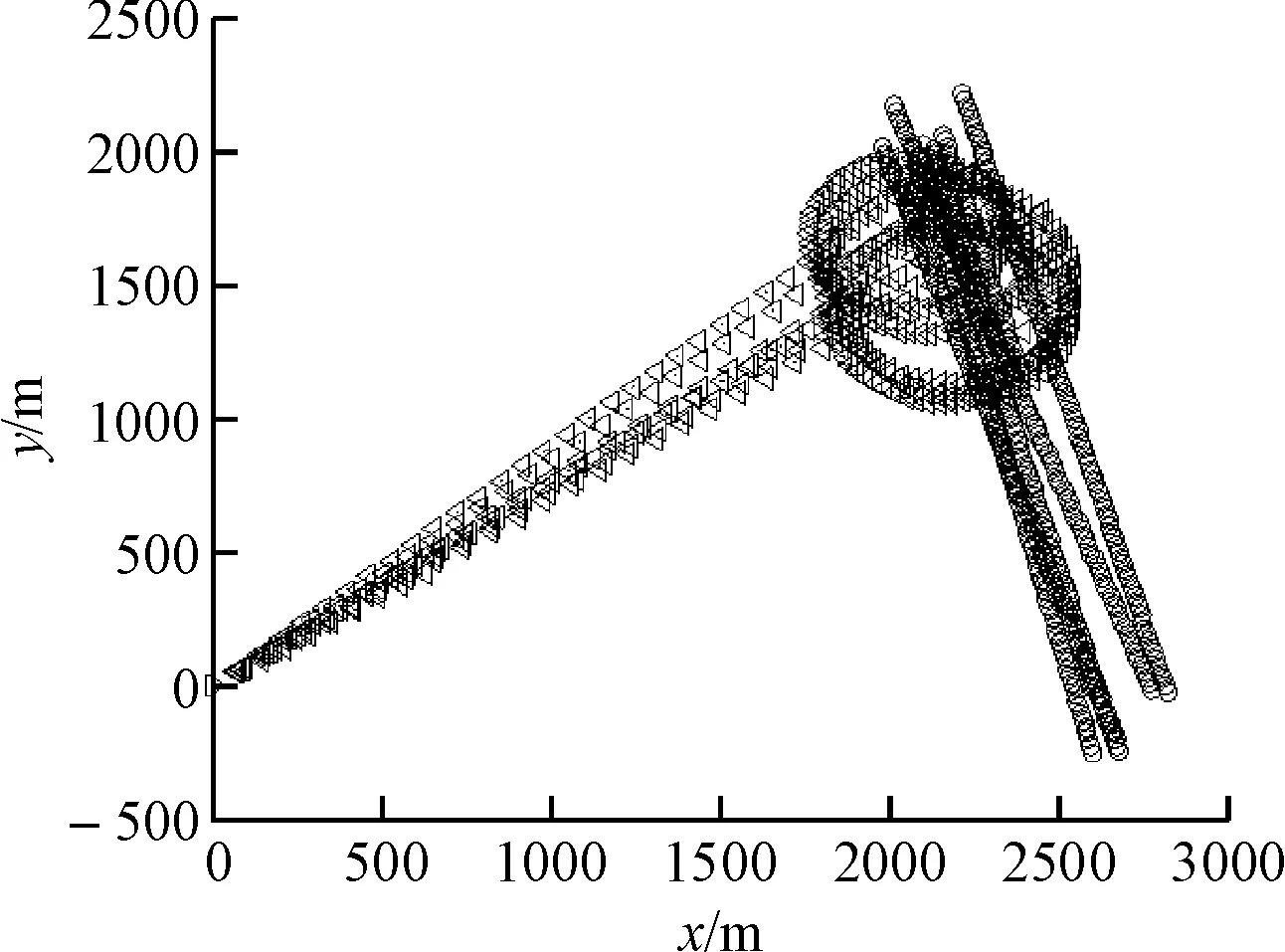
图4 潜艇对舰艇鱼雷攻击仿真图(舰艇按方式(1)规避,三角形(鱼雷),圆圈形(舰艇))

图5 潜艇对舰艇鱼雷攻击仿真图(舰艇按方式(2)规避,三角形(鱼雷),圆圈形(舰艇))

目标舷角(°)P1/P2/P3巡航速度(Kn)/目标距离(m)30⁃6060⁃9090⁃12018⁃22/20000.63/0.91/0.710.54/0.88/0.640.43/0.76/0.5218⁃22/30000.55/0.83/0.640.44/0.76/0.530.37/0.69/0.4018⁃22/40000.41/0.79/0.440.33/0.67/0.370.27/0.58/0.25
注:舰艇分别用方式(2)和(3)规避时,其置鱼雷于舰尾的角度与舰艇在近距离、小舷角、 低航速态势下使用以上方式规避置鱼雷于舰尾的角度相同。
图4中,舰艇声纳报警后即保持原航向减速航行,由于其航速低,减速需要时间短,辐射噪声能及时得到有效控制,鱼雷自导作用距离进而会发生变化,导致鱼雷声纳检测不到目标。因此,鱼雷命中舰艇的次数较少。图5中,舰艇声纳报警后即加速转向,意图置鱼雷于舰尾较大舷角后以高速逃离,但由于处于搜索状态下的鱼雷相对舰艇的距离近,方位变化较小,舰艇需要更长时间的旋回转向才能逃离鱼雷自导扇面的捕捉,同时其加速机动也不可避免会导致辐射噪声强度会变大,致使鱼雷自导作用距离增大。因此,鱼雷命中舰艇的次数较多。
结合表2数据可以看出:同等条件下,(1)潜艇在目标小舷角鱼雷攻击要比在大舷角更易命中目标,并且距离越近,命中概率越大;(2)近距离、小舷角态势下,低航速舰艇采用规避方式(1)和(3)机动要比采用方式(2)对鱼雷命中概率的影响要大,其命中概率下降较快。如潜艇在目标距离3000m,目标舷角30°~90°时对巡航速度18kn~22kn的舰艇射击,鱼雷的命中概率P1和P3平均达到0.50和0.58,而P2达到0.79。这表明鱼雷此态势下对采用方式(1)和(3)规避的舰艇攻击效果不理想。而对舰艇防御作战而言,这说明舰艇应最大限度控制辐射噪声的强度;同时,可以选择合适的规避转角以规避鱼雷自导扇面为主进行机动。
2) 远距离、大舷角态势下,高航速舰艇采用不同规避方式对鱼雷攻击效果的影响
图6和图7、图8分别是潜艇在目标距离5000m,目标舷角120°,舰艇巡航速度26kn的态势下对采用前述方式(1)和(2)、(3)机动规避的舰艇鱼雷攻击的部分次数仿真图,仿真结果如表3所示(鉴于仿真数据量较大,取典型态势部分数据说明,P1、P2和P3的代表意义同表2)。

表3 仿真结果2(300次)
注:舰艇分别用方式(2)和(3)规避时,其置鱼雷于舰尾的角度与舰艇在近距离、小舷角、 低航速态势下使用以上方式规避置鱼雷于舰尾的角度相同。
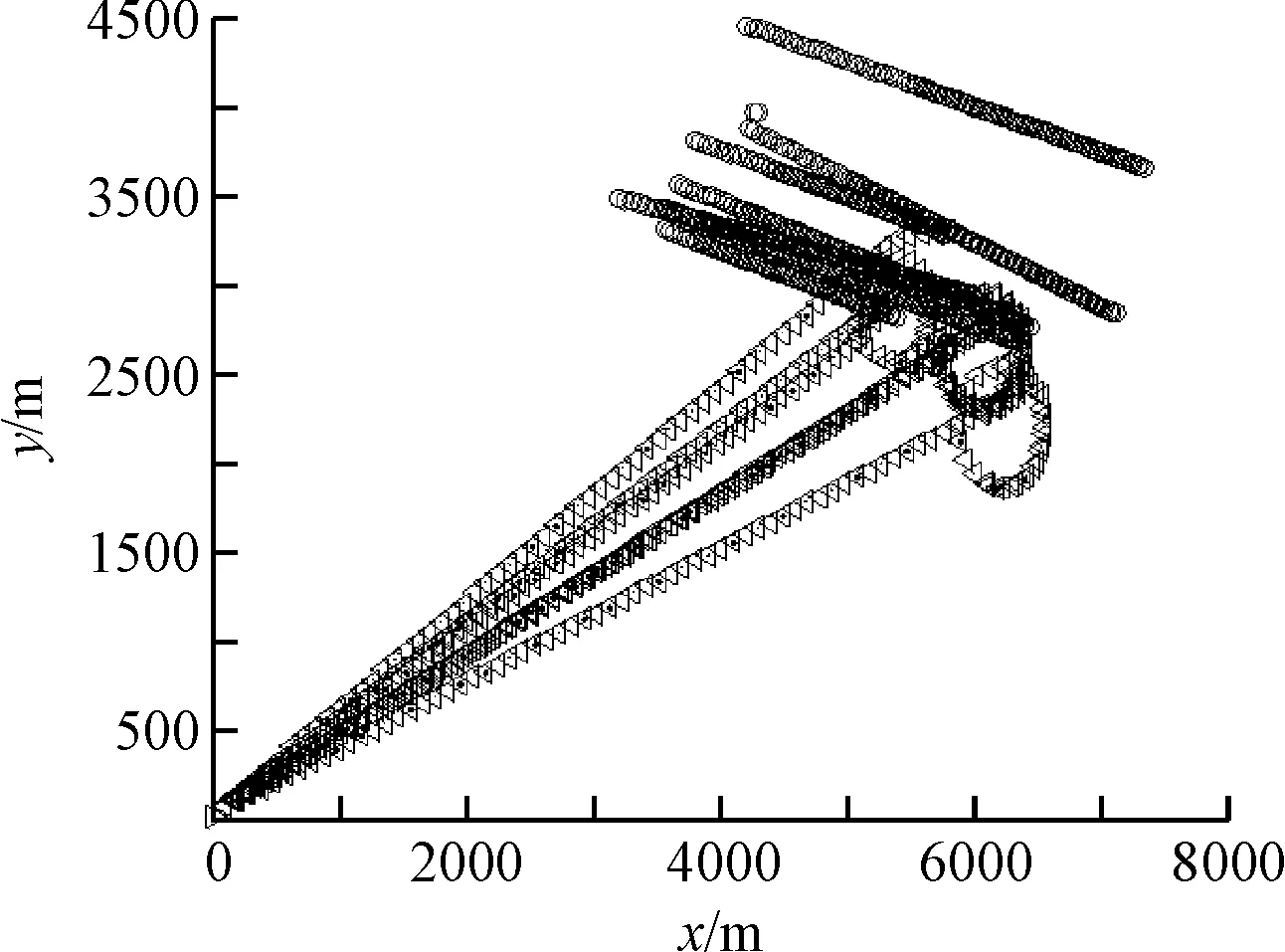
图6 潜艇对舰艇鱼雷攻击仿真图(舰艇按方式(1)规避,三角形(鱼雷),圆圈形(舰艇))

图7 潜艇对舰艇鱼雷攻击仿真图(舰艇按方式(2)规避,三角形(鱼雷),圆圈形(舰艇))
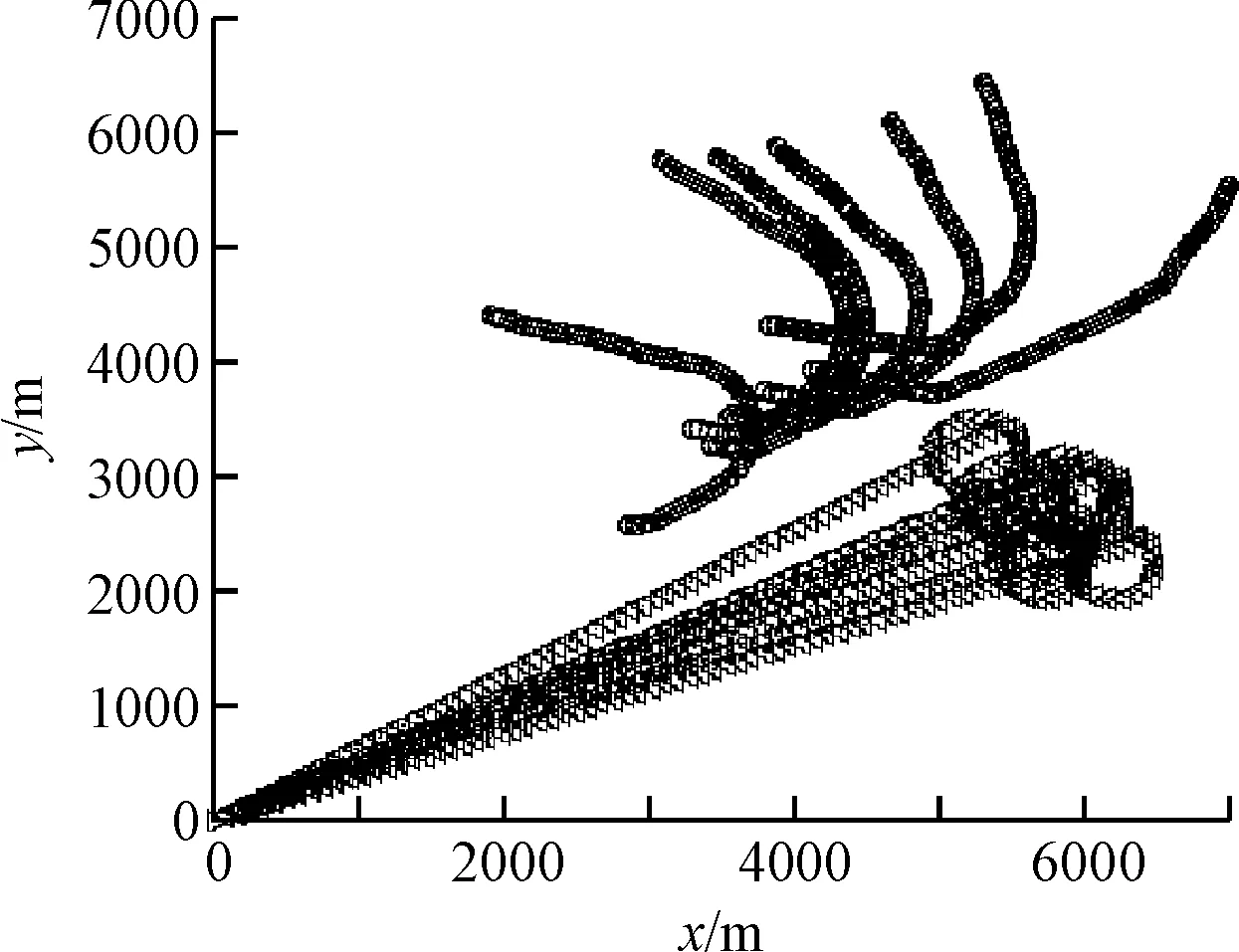
图8 潜艇对舰艇鱼雷攻击仿真图(舰艇按方式(3)规避,三角形(鱼雷),圆圈形(舰艇))
图6中,舰艇声纳报警后按方式(1)机动。尽管采取了减速措施,但由于舰艇初始航速高,并且受限于系统反应和操纵时间,其辐射噪声并不会得到及时控制,而鱼雷又能凭借其航速高、自导作用距离远的优势短时间内捕捉到舰艇。因此,鱼雷命中舰艇的次数较多。图7和图8中,舰艇声纳报警后分别采取加速转向置鱼雷于舰尾较大舷角高速机动和先加速转向置鱼雷于舰尾一定舷角航行几分钟,再变向低速脱离的方式机动。两种态势下,由于舰艇声纳报警距离较远,舰艇和鱼雷的初始距离又大于鱼雷自导作用距离,舰艇有充分的反应时间转向机动,在初始阶段就逃离了鱼雷自导系统的搜索,即便鱼雷经旋回再搜索捕捉到舰艇,其剩余航程也会所剩无几,最终航程耗尽。因此,鱼雷命中舰艇的次数较少。
结合表3数据可以看出:同等条件下, 1) 潜艇在目标大舷角鱼雷攻击要比在小舷角更难命中目标,并且距离越远,命中概率越小; 2) 中、远距离、大舷角态势下,高航速舰艇采用规避方式(2)和(3)机动要比采用方式(1)对鱼雷命中概率的影响要大,其命中概率下降较快。如潜艇在目标距离5000m,目标舷角90°~120°时对巡航速度26kn~30kn的舰艇射击,鱼雷的命中概率P2和P3达到0.11,而P1达到0.42。这表明鱼雷此态势下对采用方式(2)和(3)规避的舰艇攻击效果不理想。而对舰艇防御作战而言,这说明舰艇应尽可能及时拉开与鱼雷的距离,同时选择合适的规避转角以规避鱼雷自导作用距离为主进行机动。
综合对图4~图8和表2~表3的分析,并结合仿真经验,可得出以下结论:
1) 舰艇要尽量避免对近距离、小舷角态势下的来袭鱼雷进行防御,并且此态势下要严格控制辐射噪声,不能盲目加速;如果有条件使用对抗器材对鱼雷抗击,可酌情在使用方式(1)的基础上先使用武器后再以方式(3)寻求规避逃脱。
2) 舰艇力争在远距离发现来袭鱼雷的同时应选择置鱼雷于舰尾较大舷角迅速逃脱;如果有条件使用对抗器材对鱼雷抗击,可酌情在使用方式(2)或(3)的基础上先寻求机动规避后再使用武器。
5 结语
本文从潜射鱼雷攻击舰艇的角度切入要研究的问题,通过对鱼雷弹道及舰艇和鱼雷对抗过程的仿真模拟,定量分析了舰艇不同规避方式对声自导鱼雷命中概率的影响,在此基础上阐述了其在不同作战态势下的使用时机和与对抗器材相结合使用抗击鱼雷时应值得考量的问题。诚然,仿真根据相关模型和假设的态势得出的结论还有待结合鱼雷不同的自导系统以及舰艇声纳性能、反应时间和旋回角速度等指标来做进一步验证,但其结果对鱼雷防御作战的相关研究还是有一定参考价值。
[1] 宗方勇,王树宗.潜用自导/线导鱼雷直航射击功能的战术意义[J].舰船科学技术,2005,27(1):52-54.
[2] Jung-Min Pak, Dong-Gi Woo. Target Search Method for a Torpedo to the Evading Ship Using Fuzzy Inference[C]//ICROS-SICE International Joint Conference,2009.
[3] 李本昌,杨辉,江禅志.潜射鱼雷的自导方式及机动对抗条件下的运用[J].指挥控制与仿真,2015,37(1):1-4.
[4] 邹振华,李守奇.水面舰艇规避自导鱼雷的建模计算与分析[J].舰船电子工程,2008,28(10):122-124.
[5] 李本昌,梁涛.潜艇鱼雷射击模型的通用化处理及运用[J].鱼雷技术,2013,21(5):384-387.
[6] 谢飞跃,李本昌.鱼雷对抗假目标的再搜索弹道研究[J].鱼雷技术,2003,11(3):38-40.
[7] 章新华,刘德才,鄂群.水声对抗中舰艇规避声自导鱼雷的航速问题[J].兵工学报,2002,23(1):83-85.
[8] 贾跃,宋保维.水面舰船对声自导鱼雷防御机动方法研究[J].火力与指挥控制,2009,34(1):45-48.
[9] 姜凯峰,周明,葛津华,等.舰载反鱼雷鱼雷齐射作战能力研究[J].舰船科学技术,2010,32(11):64-68.
[10] 刘伯胜,雷家煜.水声学原理[M].哈尔滨:哈尔滨工程大学出版社,1993.
[11] 张勇平,张静远,尹文进,等.对抗作战条件下鱼雷自导性能分布式仿真[J].海军工程大学学报,2013,25(4):22-29.
[12] 孟庆玉,张静远,宋保维.鱼雷作战效能分析[M].北京:国防工业出版社,2003.
[13] 姚奉亮,贾跃,丁贝.悬浮式深弹拦截不确定型鱼雷作战模型研究[J].鱼雷技术,2011,19(1):63-67.
[14] 张宇文.鱼雷弹道与弹道设计[M].西安:西北工业大学出版社,1999.
[15] 宋裕农.一种潜用自导鱼雷的弹道模拟[J].弹道学报,1999,11(3):67-72.
Simulation Research of Sub-launched Acoustic Homing Torpedo’s Hit Probability Based on Different Vessel Evasive Maneuver
YAN Yan ZHAO Xiangtao
(Dalian Naval Academy, Dalian 116018)
In order to study the influence of vessel evasive tactics on sub-launched acoustic homing torpedo and choose the most suitable evasive maneuver in different operational situations, this paper firstly establishes torpedo ballistic model, torpedo maneuvering model and vessel maneuvering model based on the typical process in which a torpedo attacks vessel, then make simulating calculations quantitatively with Monte Carlo method. The analyzed results indicate that evasive maneuver have a great impact on torpedo’s hit probability. On the basis of simulating results, some favorable vessel evasive methods are suggested and some problems such as how to use it when being combined with countermeasure equipments are discussed. The results may provide reference for maximizing evasive maneuver’s role in torpedo defense operation.
acoustic homing torpedo, evasive maneuver, torpedo defense, hit probability
2015年2月4日,
2015年3月18日
闫岩,男,硕士研究生,研究方向:水下对抗武器装备及作战使用。赵向涛,男,副教授,硕士生导师,研究方向:水下对抗武器装备及作战使用。
TJ631.5; E833
10.3969/j.issn1672-9730.2015.08.036
