基于电流滞环的实现动能回收的无刷直流电机控制方法
2015-03-12汪磊,胡杨,丁伟
汪 磊,胡 杨,丁 伟
(1.合肥工业大学,合肥230009;2.台州市金宇机电有限公司,台州318020)
0 引 言
无刷直流电机是指具有串励直流电动机起动特性和并励直流电动机调速特性的梯形波/方波直流电动机,其基本结构由电机本体、功率驱动电路及位置传感器三者组成[1]。无刷直流电机具有结构简单、出力大和效率高等特点[2]。
无刷直流电机的控制策略大多采用电压、电流双闭环PI 调节器[3-5],对于电机电流的控制是通过PWM 占空比调节电机的端电压来实现的。但在实际中,电机转子磁场并不是理想的梯形波,使得在传统改变PWM 波占空比的控制策略下的电流波形近似于三角形,对控制器的容量要求较高,同时控制器以及电机的效率较低。传统的控制系统存在起动电流过大、控制器的容量较大、起动停车时间较长等问题。在制动方式的选择上,大多数采用能耗制动,使得在制动过程中产生的能量消耗在电机的绕组上。而能量回馈制动则是将制动过程中的动能回馈到直流电源,从而延长直流电源的工作时间。参考文献[6 -7]研究了无刷直流电机回馈制动的控制方法,并进行了实验研究。随着无刷直流电机的应用范围越来越广泛,对其实现回馈制动的研究也越来越受到重视。
本文介绍了一种电流内环采用滞环控制的无刷直流电机控制方法。这种控制方式具有以下优势:1)起动时能限流起动,减小由于起动电流过大对控制器及电机造成的冲击;2)缩短了起动、停车时间,起动时采用大电流起动,停车时同样也采用大电流停车;这样实现了快速的起动、停车;3)停车采用的是能量回馈制动方式,将电机负载惯量储存的动能回馈到蓄电池;4)采用内环电流滞环后,使得电机相电流能够快速的跟随电流给定值,这样快速地控制可以得到平稳的电流波形,电流平稳,缩小控制器的容量,提高电机的效率。
1 数学模型
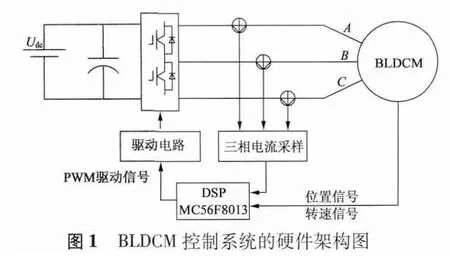
图1 是无刷直流电机的控制系统的硬件架构图,包括主电路和控制电路两部分。
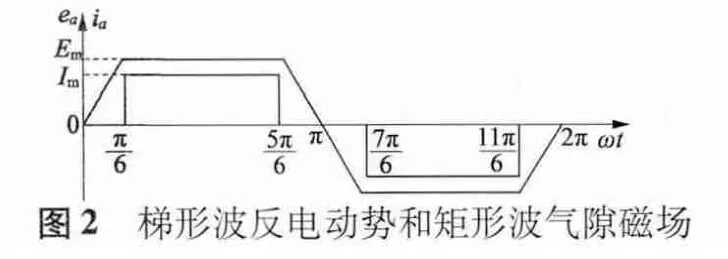
首先对无刷直流电动机作假定,转子磁通不饱和,忽略电机的附加损耗,即磁滞损耗和涡流损耗。理想状态时,反电动势和气隙磁场的波形如图2 所示。
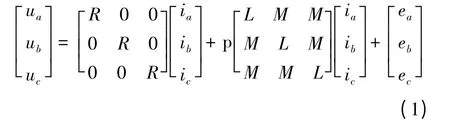
一般认为电机绕组的电阻R 是常值,每相绕组的自感L 和相与相之间的互感M 也是定值。在此情况下,无刷直流电动机的三相绕组电压方程:
2 换流模式分析
采用两相导通星形三相六状态控制模式,每一时刻都有两相绕组通电。以A 上B 下导通为例进行环流模式分析,A 相桥臂处于调制状态,B 相下管处于常通状态,C 相上下管全部关断。
图3(a)为电动状态下A 上B 下导通状态的环流模式,电动势平衡方程:

对应图4 中t0~t1时段,S0 导通,电流增大。
图3(b)为电动状态下A 下B 下导通状态的环流模式,电动势平衡方程:

对应图4 中t1~t2时段,D1 导通,电流减小。
图5 为电机制动状态下采用滞环控制的瞬时电流波形,图6 为电动机制动状态下的电流换相模式。t0时刻,ia达到滞环的下限值,此时电流方向与电动状态时相反,S0 不能导通,电流经D0 流向电源正极,ia逐渐增大。当ia= -iref时,HBC 仍输出高电平,D0 持续导通,ia继续增大,直到t1时刻,ia= -(iref-ih/2),滞环输出发生翻转,D0 关断,经延时后S1 导通,ia逐渐减小。直到t2时刻,ia= -(iref+ih/2),滞环输出再次发生翻转,D0 再次导通。这样D0与S1 交替工作,D3 处于常通状态,使输出电流ia与给定值iref的差值保持在±ih/2 范围内。

图6 的拓扑是一个Boost 电路,通过Boost 升压,电机对电源进行充电,实现动能回收。
3 电流滞环环宽与开关频率的关系
以电动状态下滞环控制的瞬时电流波形为例,分析滞环环宽和开关频率之间的关系。首先假定忽略开关死区时间,认为同一桥臂上下功率管的导通和关断是瞬时的、互补工作的[4]。由图3 及式(2)可以得到:

由图3 及式(3)可以得到:



考虑到功率管允许的开关频率较高,可以假定在开关频率较高时忽略电阻的影响,绕组电感产生的作用远大于电阻的,则有:

由式(8)可以得到开关频率f 与滞环环宽ih的关系式:
由式(9)可以看出,开关频率与滞环环宽成反比。
4 控制策略
图7 是内环采用电流滞环控制的双闭环结构图,KT为电机转矩系数;J 为转动惯量。
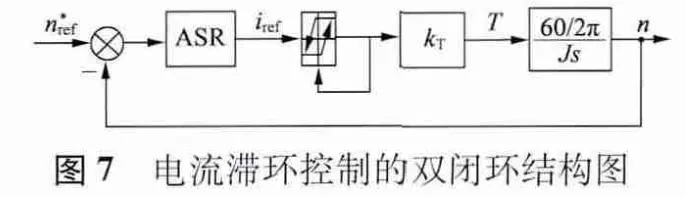
图7 中,转速外环调节器ASR 应具有良好的抗干扰能力,则按照典型Ⅱ系统设计,选择PI 调节器,外环控制规律:

式中:Knp,Kni分别为转速外环比例、积分系数。
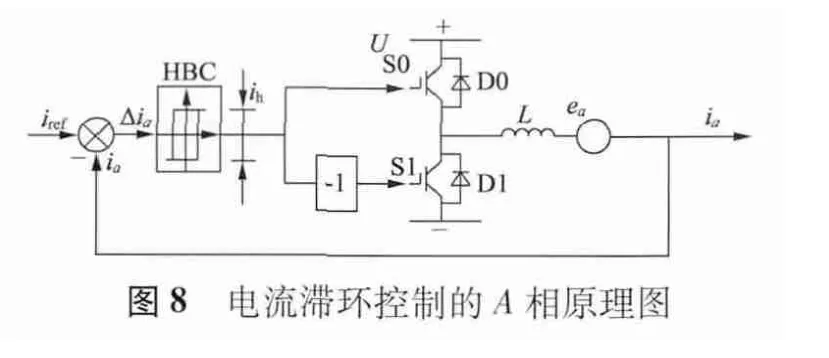
对于电流内环,采用滞环控制。将实际转速与给定转速的差值送入转速调节器ASR,得到电流的给定值iref,通过对电流进行比较,系统直接输出高电平或低电平,使电流迅速跟踪给定电流。电流滞环控制的A 相原理图如图8 所示。
5 实验结果与分析
实验中用到的控制芯片是Freescale 的DSP MC56F8013;电机是外转子的无刷直流电机,电机参数如表1 所示。

表1 电机参数
图9 是无刷直流电机空载起动及停车的波形。从图9 中可以看出,t0时刻电机起动,直流侧电压被拉低,电机以较大电流起动,t1时电流稳定,起动完成;t1~t2是稳定运行时间;t2~t3是电机停车过程,电机以最大电流制动,直流母线上会流过一个反向的负电流,同时,直流侧电压会有一个升压过程,制动时直流侧蓄电池会进行充电。
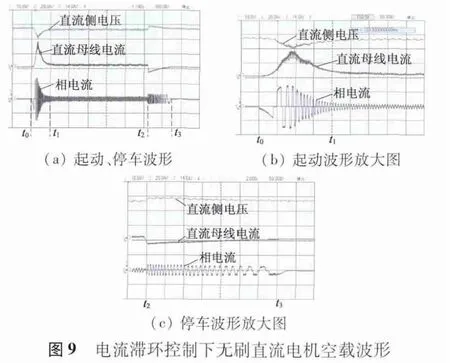
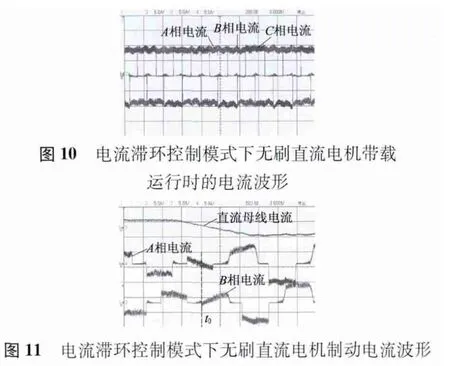
图10 是无刷直流电机在电流滞环控制模式下带负载运行时的电流波形。
图11 为电流滞环控制模式下,无刷直流电机制动过程电流波形。从图11 中可以看出,在A 相功率管导通区间内,A相电流在t0时刻由正值减小到了负值;B 相电流应在t0时刻变为负值,但此时B 相产生了正电流;直流母线电流反向增大。此时,无刷直流电机处于制动状态,电机的动能转化为电能,向蓄电池充电,实现动能回收。
6 结 语
本文将滞环控制应用于电机调速系统的内环控制上,结合转速外环的PI 调节控制,构成双闭环调速系统,得出以下结论:
(1)在电机起动过程中,能保持较大电流快速启动;在电机制动过程中,电机能保持较大电流快速制动并且实现了动能回馈;
(2)整个实验过程中,采用内环电流滞环后,使得电机相电流能够快速的跟随电流给定值,得到平稳的电流波形。
[1] 夏长亮. 无刷直流电机控制系统[M]. 北京:科学出版社,2009.
[2] 夏长亮,方宏伟.永磁无刷直流电机及其控制[J].电工技术学报,2012,27(3):26 -34.
[3] 王孝武. 现代控制理论基础[M]. 北京:机械工业出版社,1998.
[4] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[5] 王成元,夏加宽,孙宜标. 现代电机控制技术[M]. 北京:机械工业出版社,2008.
[6] 黄斐梨,王耀明,姜新建,等.电动汽车永磁无刷直流电机驱动系统低速量回馈制动的研究[J]. 电工技术学报,1995,9(3):28 -36.
[7] 张毅,杨林,李立明,等.电动汽车无刷直流电动机的回馈控制[J].上海交通大学学报,2005,39(9):52 -55.
[8] 孙佃升,贾荣丛,白连平.半桥调制下无刷直流电机回馈制动的研究[J].电力电子技术,2008,42(10):22 -24.