无刷直流电动机转矩脉动抑制的空间矢量电流控制策略
2015-03-12杨克立
程 辉,杨克立
(1.河南工程学院,郑州451192;2.中原工学院,郑州450007)
0 引 言
无刷直流电动机因其功率密度高、调速性能好、效率高、结构简单、动态性能好等优点,在家用电器、汽车、航空航天、医疗、伺服驱动装置等领域广泛地应用[1]。但是对于具有梯形波反电动势的无刷直流电动机,存在的转矩脉动会降低系统工作的可靠性并带来振动、谐振及噪声等问题,限制了它在高精度场合的应用。电磁转矩脉动是由于感应电动势波形和绕组电流波形偏离理想波形导致的。其中绕组电流换相对转矩脉动影响最大,抑制换相转矩脉动成为减小电机整体转矩脉动的关键问题[2]。
目前,许多文献对无刷直流电动机电磁转矩换相脉动的抑制都提出了不同的控制算法和策略,并进行了深入的研究。滞环电流控制法能够提供更高的电流控制能力,但是不易实现[3],因为开关频率取决于实时滞环宽度和反电动势幅值;脉冲宽度调制(以下简称PWM)电流控制法开关频率恒定,但电流控制能力差。无刷直流电动机有单斩和双斩PWM 调制方式,其中单斩和双斩PWM 相比,前者输出的稳态转矩脉动小[4-5],开关损耗小,但是电流的动态相应慢。
本文提出了一种基于电压空间矢量(以下简称SVPWM)的电流控制策略,建立了无刷直流电动机的数学模型,详细分析了SVPWM 的工作原理,并将SVCCM 的控制策略应用到无刷直流电动机调速系统中,基于MATLAB 仿真软件,验证了该算法的有效性和可行性,并与传统的控制方法及单斩和双斩PWM 算法下的仿真结果进行了比较分析,结果表明该方法能有效地减少转矩脉动。
1 无刷直流电动机建模
图1 为三相无刷直流电动机的等效电路。假定三相无刷电机的定子绕组为Y 接,其各相绕组电压平衡方程:
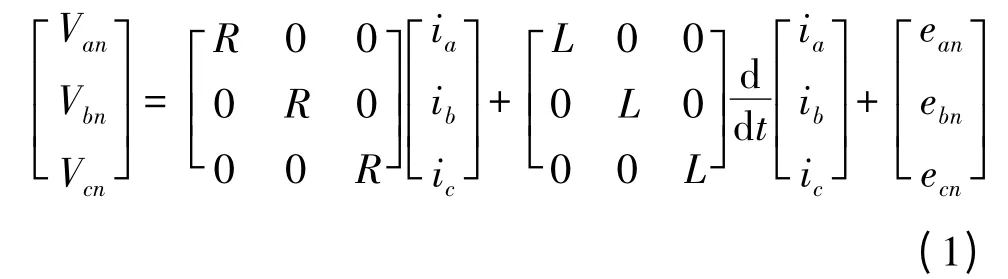
式中:L=Ls-Lm;Van,Vbn,Vcn为定子三相绕组电压;ean,ebn,ecn为定子绕组感应电势;ia,ib,ic为三相定子电流;Ls为绕组自感;Lm为绕组间的互感。
无刷直流电动机的电磁转矩方程:
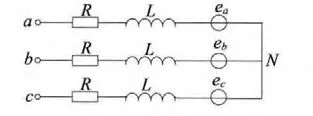
图1 三相无刷直流电动机等效电路

式中:ωr为转速。
2 SVPWM 控制策略
2.1 改进的拓扑结构
采用SVPWM 控制的无刷直流电动机系统原理框图如图2 所示[6]。
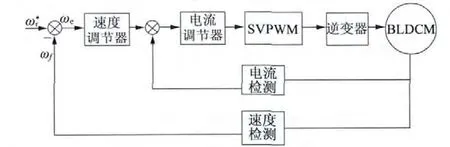
图2 基于SVPWM 的无刷直流电动机控制框图
图3 是本文提出的电压型逆变器的无刷直流电动机基于空间矢量电流控制的SVPWM 控制系统框图。其改进的地方主要有两点:一是增设了转子位置检测器;二是作为SVPWM 发生器的参考信号不再是电压信号,而是电流误差信号。
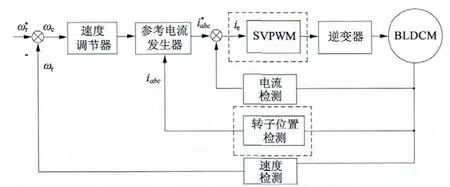
图3 基于空间电流矢量SVPWM 的无刷直流电动机控制框图
2.2 SVPWM 控制策略
由于同一个桥臂的上下功率管不会同时导通,可以用3 个变量Sa+,Sb+,Sc+表示6 个功率管的开关状态,例如当Sa+=1 时表示逆变器A 相上桥臂导通,则三相共有8 种开关状态,其中有效电压矢量有6 种。表1 是8 种开关状态及对应的三相输出电压及变换到α-β 坐标系下的电压空间矢量。
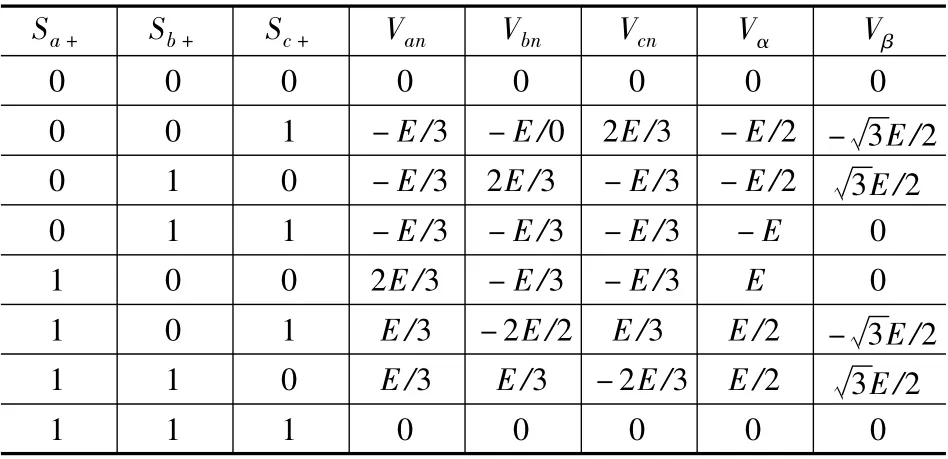
表1 开关状态及电压表
图4 为三相空间电压矢量在α -β 坐标系下的分布,其中6 个非零矢量将正六边形等分为6 扇区,2 个非零矢量位于正六边形的中心。所以任意时刻的输出电压可以通过相邻两基本矢量和零矢量合成。即:
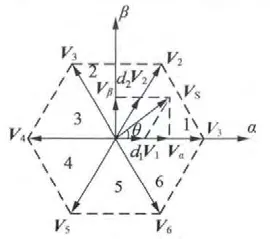
图4 坐标系
由图4 参考矢量:

把式(3)代入式(4)可得空间电压参考矢量在相邻两电压矢量的占空比,如表2 所示。
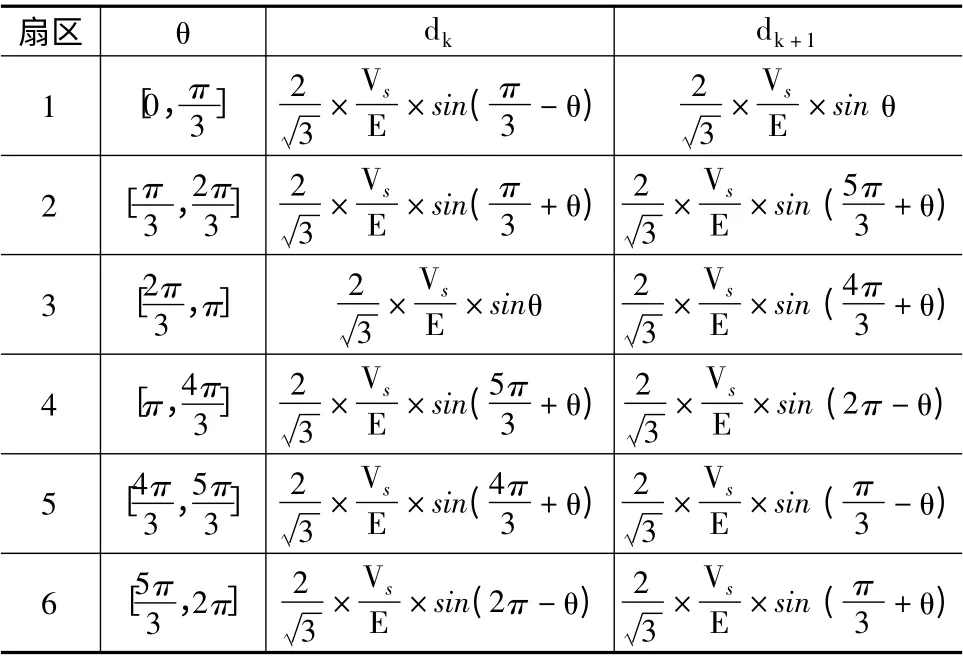
表2 各扇区对应的占空比
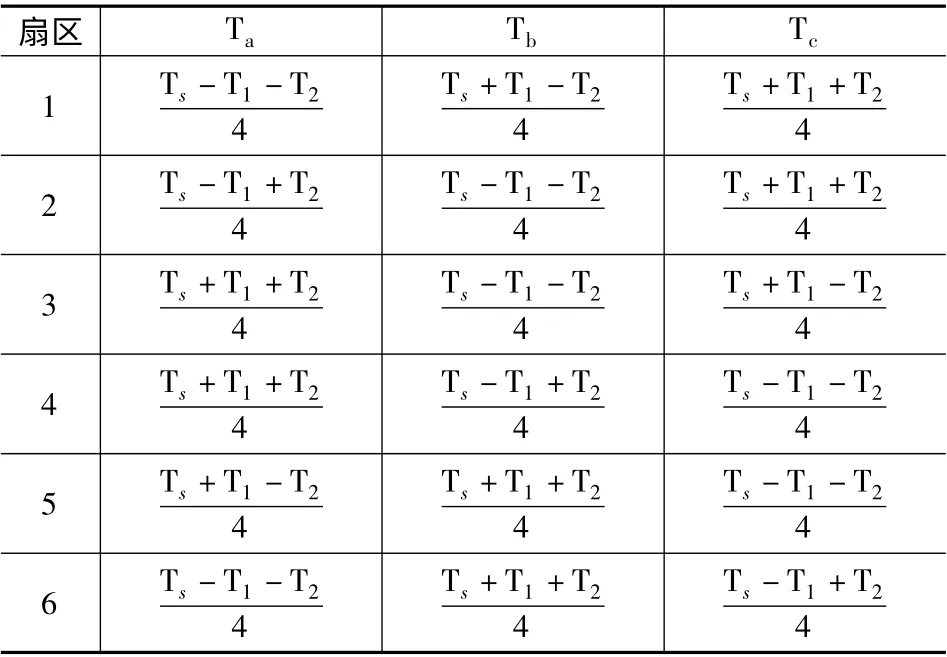
表3 占空比
3 电流控制算法
基于空间矢量电流控制算法(以下简称SVCCM)的控制系统结构框图如图5 所示,为一个转速电流双闭环控制系统。包括电流控制、转速调节器(以下简称ASR)、SVPWM 控制模块、电压型逆变器、BLDC 电机和相应的检测传感器。
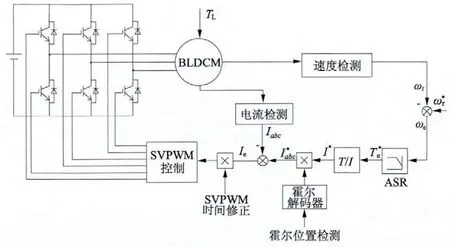
图5 SVCCM 控制系统结构图
图5 中,对于T/I 模块,主要进行转矩-电流线性变换,变换的前提是三相定子绕组电流为理想矩形波。但电机在换相期间,由于电机绕组电感的原因,电流在开关管关断期间是衰减至零的,这同时也是产生转矩脉动的主要原因,在实际中不可能获得理想电流波形。因此设置了霍尔传感器及霍尔解码器。位置信号通过霍尔位置传感器获得,霍尔解码器用于提取不同位置时的电机反电动势信息。随着转子旋转,霍尔开关所在磁场极性交替变化,输出-1,0,1 三种电平信号,以此乘以峰值参考电流信号,可由此得到三相定子电流参考信号I*abc,和检测到的三相实际定子电流进行比较,比较的结果ie按照时间常数进行修正,得到的控制量作为参考信号和高频三角载波进行比较从而获得电压驱动信号,以产生希望的输出电压控制信号来驱动逆变器。如果电流误差信号大于三角载波,逆变器输出高电平,否则输出低电平,这样逆变器将产生一个正比于电流误差信号的输出电压。
基于上述分析,采用电流控制的SVPWM 调制技术可以获得矩形的三相定子电流,因而可以抑制换相转矩脉动,从而使转矩波动减至最小。
4 仿真结果
BLDCM 系统仿真模型采用MATLAB/Simulink进行仿真。直流串励电机参数如下:150 V,5 A,1 500 r/min,3 N·m,反电势系数为0.42 V/(rad·s-1),电感L=10 mH,相电阻R =0.5 Ω,极对数p=2。本文进行了不同控制方式下的仿真,结果如下。
4.1 传统控制方式
该控制方式下的仿真结果如图6 所示。
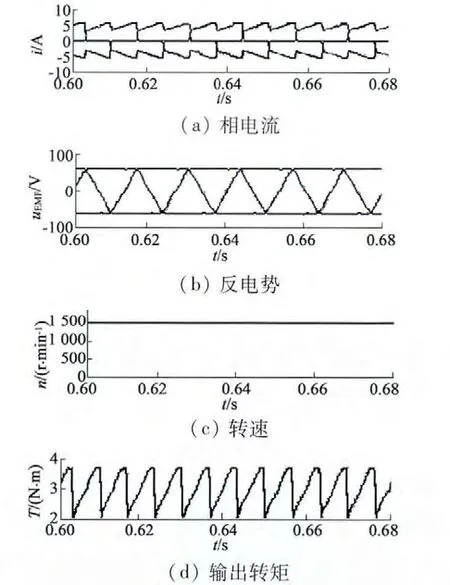
图6 传统控制方式下的仿真结果
由图6 可看出,在传统控制方式下,梯形反电势最大可到64 V,类矩形的相电流最大达4.8 A,负载转矩变化从2.08 N·m 到3.78 N·m,转矩波动达29.01%,相电流THD 达24.33%。
4.2 单斩PWM 控制方式下
该控制方式下的仿真结果如图7 所示。
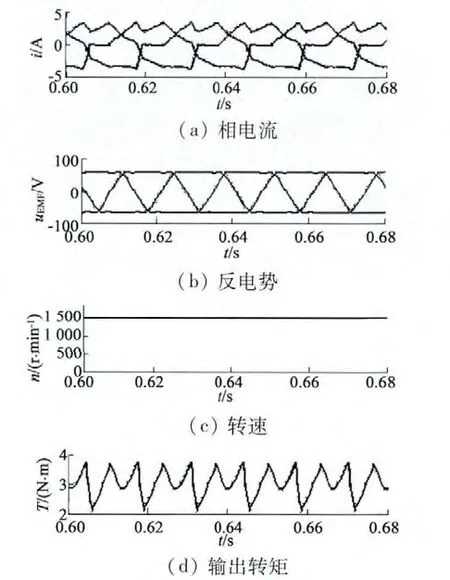
图7 单斩PWM 控制方式下的仿真结果
从图7 可以看出,负载转矩变化从2.2 N·m到3.6 N·m,转矩波动为24. 13%,电流THD 为24.19%。性能略优于传统控制方式。
4.3 双斩PWM 控制方式下
该控制方式下的仿真结果如图8 所示。
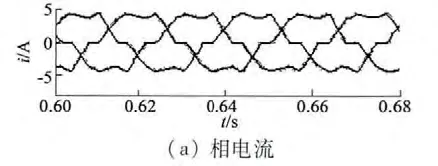
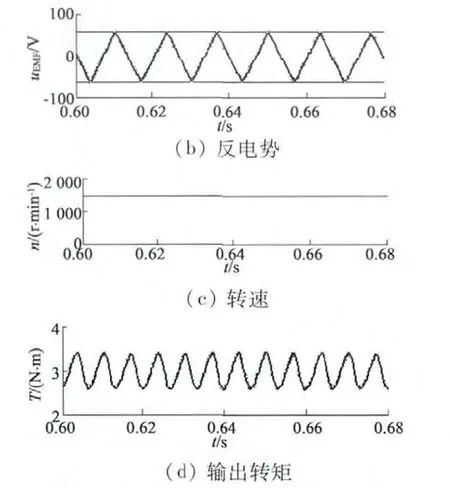
图8 双斩PWM 控制方式下的仿真结果
从图8 可以看出,带负载转矩变化从2.5 N·m到3.5 N·m,转矩波动为16.67%,相电流THD 为13.24%。性能优于单斩控制方式。
4.4 SVCCM 控制方式下
该控制方式在稳态时的仿真结果如图9 所示。
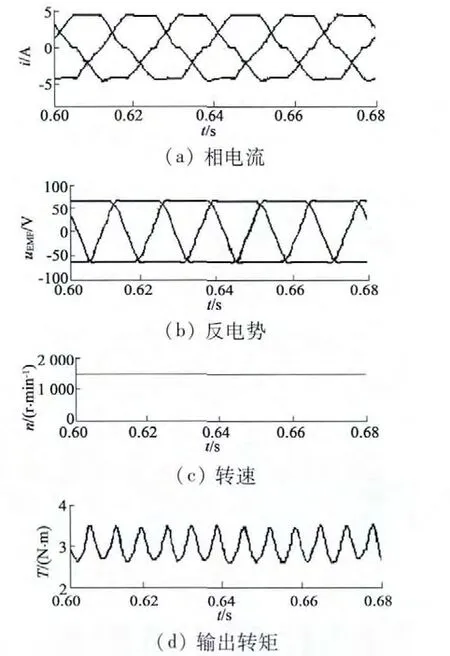
图9 SVCCM 控制方式下的仿真结果
从图9 可以看出,负载转矩变化从2.7 N·m 到3.3 N·m,转矩波动为10%,电流THD 为9.02%。
从上述仿真结果来看,在常用的控制策略中,采用SVCCM 调制方式最好,能有效抑制电机转矩脉动。
4.5 SVCCM 控制方式下的暂态响应
在t=0.55s 时负载扰动发生突变,从1 N·m到3 N·m 时系统的仿真结果如图10 所示。
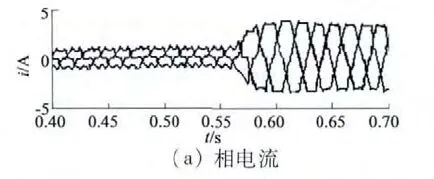

图10 SVCCM 控制方式下负载突变的仿真结果
5 结 语
本文研究并设计了采用空间矢量电流控制策略的直流串励电机调速系统,以减少脉动转矩。通过和目前常用的几种控制策略作用于同一台直流无刷电机下的仿真结果进行比较,和在带负载发生突变时验证并分析了系统的稳态性能和动态响应,结果验证了所提控制方法的有效性、可行性和优越性。
[1] 张凌栋,王正仕.基于模糊控制的低成本无刷直流电机控制方法[J].微电机,2012,45(6):1 -2.
[2] 张勇,程小华.无刷直流电机转矩脉动抑制措施研究[J].微电机,2013,46(7):88 -90.
[3] PARK S,KIM T,AHN S,et al.A new current control algorithm for torque ripple reduction of BLDC motors[C]//Proceedings of IECON,2001,2:1521 -1526.
[4] SONG J,CHOY I.Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[J].IEEE Trans.on Power Electron,2004,19(2):312 -319.
[5] SHI T,GGUO Y,SONG P.A new approach of minimizing commutation torque ripple for brushless DC motor based on DC-DC converter[J].IEEE Trans. on Ind. Appl.,2010,57(10):3483 -3490.
[6] 张杰.基于SVPWM 控制的无刷直流电机的建模与仿真[J].机电工程,2013,30(9):1106 -1108.
[7] 王会明,丁学明,尹武.无刷直流电机换相转矩脉动抑制新策略[J].电气传动,2012,42(10):18 -22.