8×8APD阵列激光三维成像接收机研制
2015-03-12王挺峰
王 飞,汤 伟,王挺峰,郭 劲
(中国科学院 长春光学精密机械与物理研究所
激光与物质相互作用国家重点实验室, 吉林 长春130033)
8×8APD阵列激光三维成像接收机研制
王飞*,汤伟,王挺峰,郭劲
(中国科学院 长春光学精密机械与物理研究所
激光与物质相互作用国家重点实验室, 吉林 长春130033)
摘要:为了实现对目标的无扫描阵列激光三维成像并研究系统参数对三维成像距离分辨率的影响,研制了8×8 pixel激光三维成像接收机。接收机采用线性模式APD阵列,设计了模拟信号放大、阈值处理将回波光信号转换为数字信号后,利用FPGA设计实现64通道高精度阵列计时系统,实现了对目标的无扫描实时三维成像功能。首先对设计完成的三维成像接收机组成及成像原理进行了介绍,对三维成像接收机中APD探测器阵列信号的模拟处理和数字处理流程和实现方式进行了说明。随后分别对三维成像的核心FPGA计时系统及探测器整体进行了电子学测试和实验测试。测试结果表明,FPGA计时子系统的时间分辨率优于140 ps,三维成像系统整体距离分辨率在0.2 m左右。最后对分辨率的误差进行了分析,结果表明,激光回波强度波动是影响此接收机距离分辨率的最主要因素。
关键词:三维成像接收机;APD阵列探测器;高分辨测距;多抽头延迟线
Design of 3D laser imaging receiver based on
1引言
采用阵列式焦平面探测器的无扫描激光三维成像技术[1]具有成像速度快,分辨率高的天然优势,尤其是具备三维姿态测量能力[2],使得其在目标测量[3-4]、导航制导[5-6]、地形测绘[7]、安防告警[8]等多种领域具有极大的应用潜力。目前具备三维成像能力的焦平面阵列以雪崩二极管(APD)探测器为主。对回波时间的精确测量技术是实现高精度目标三维成像的核心。目前国际上多采用专用集成电路,采用光敏探测器与读出电路直接结合的方式实现。此种方式可实现大规模的阵列集成,最高可达到256×256[9],但受技术封锁限制,目前此类器件较难直接获得。研制成本也较高,极大地影响了激光三维成像技术在我国的应用。国内目前正逐步开展此类探测器的研制,但目前尚无商用产品可用。而市场上存在单独的小规模APD探测器阵列,阵列规模包含5×5,8×8等二维阵列以及25元、16元线性阵列等,通常无信号处理电路部分,不能直接用于激光三维成像,需要额外订制电路对其输出信号进行进一步的处理。目前已有部分单位开始了基于APD线阵和面阵探测器[10]的激光三维成像技术研究。
利用单独的APD探测器阵列,设计实现阵列的高精度计时处理是解决目前探测器可用性困境的出路之一。但由于APD阵列探测器像元数多,其后续信号处理电路通道数多,尤其是阵列计时若采用分立元件进行设计将面临极大的困难。利用大规模可编程器件设计实现阵列计时电路则可以解决这一问题。
FGPA是一种具有高度集成度和灵活性的可硬件编程器件,其设计方法与设计思路与专用集成芯片具有一定的通用性,相关的测量方法也可移植至未来的专用集成芯片中。利用FPGA的多通道数字化处理能力,可以实现对较小规模阵列探测器的回波时间测量,实现阵列式的激光三维成像,从而可以进一步开展阵列激光三维成像相关技术的研究。由于FPGA仅可处理数字信号,尚无法处理模拟信号,因此APD阵列探测器还需要设计信号放大、时刻鉴别电路,将APD探测到的微弱回波信号进行初步的放大和阈值处理,以便产生可供FPGA处理的数字脉冲信号。
通过设计APD探测器阵列信号处理电路可积累专用集成电路设计经验,为未来全集成化阵列探测器信号处理电路提供设计依据和参考。
2激光三维成像系统设计
2.1 激光三维成像系统整体结构
激光三维成像系统的整体结构如图1所示。

图1 3D成像系统整体结构 Fig.1 Structure of 3D imaging system
由激光器发出脉冲光对目标进行照明,单点探测器作为计时处理的起始时间标记,由目标返回的激光信号经接收光学系统成像到APD阵列,由信号处理系统进行相应的处理,获取激光的停止时间标记,从而获得目标的距离信息。
2.2 探测器信号处理
根据目前所能获得的探测器,方案采用了具有64个像元的APD面阵列探测器,其像素单元呈8×8二维排布。模拟信号处理部分采用厂家提供的试用板,所有64路APD输出的信号采用相同的处理方式,APD输出信号首先经过跨阻放大器放大后与阈值信号进行比较,当回波信号大于阈值时,认为有回波信号到达,此时比较器输出高电平。
激光发射与回波信号高电平的上升沿之差通过FPGA进行测量,采用Xilinx公司的Kintex-7系列芯片作为主处理芯片,利用FPGA逻辑单元内部的专用进位链(Carry Chain)组成延时链进行时间测量。同时采用粗计数与精计数结合的方式,实现大范围的时间测量[9,11]。
系统整体功能结构如图2所示,采用软核技术提高系统的灵活性。

图2 FPGA 处理结构 Fig.2 Structure of FPGA processing
软核负责将信号的飞行时间进行编码,并通过串口/以太网发送到上位机进行后续信号处理。经过实验测量,基于FPGA的多通道时间间隔测量系统的测量分辨率优于140 ps,与之对应的距离分辨率误差可达到2 cm。
2.3 激光三维成像接收机
探测器模拟信号处理板与FPGA数字信号处理板通过板对板高速接口相连,PCB放置在一个相机盒内,尺寸约150 mm×150 mm×60 mm。机体通过C接口,可直接或者通过转接环与常用的相机镜头相连,安装完成的3D接收机实物如图3所示。

图3 3D接收机实物照片 Fig.3 Photo of the 3D receiver
3实验测量
3.1 FPGA计时电子学测量
为降低实际测量中各种因素的影响,采用直接电子学测量的方式对FPGA计时系统的计时分辨率进行了测试。测试采用的信号源为泰克公司的AFG3102双通道函数信号发生器产生,两路信号的延时通过信号发生器调节,测试装置如图4所示。

图4 电子学测试设置照片 Fig.4 Photograph of the electrical testing setup
分别对100~900 ns的延时进行了测量,测试结果如表1所示。

表1 精度与分辨率测试
由测试结果可见,在100~900 ns时间范围内,多次测量的统计平均精度在60 ps左右,方差优于140 ps,对应距离误差约为2 cm。由此可见,FPGA计时系统可达到较高的计时精度,有望获得较高的距离分辨率。
3.2 激光三维成像实验
为验证三维接收机的三维成像能力,利用实验室现有器材,搭建了三维成像原理实验平台,对三维成像接收机的距离分辨率进行了测试,实验设置如图5所示。
光源采用脉冲式532 nm激光器,由于工作在较低功率条件下,激光脉冲宽度约为20 ns。实验所用镜头为Nikon的18~105 mm变焦镜头。由探测器像元数较少,难以对复杂目标成像,因此采用了平板目标与背景墙,目标放置在探测系统前3~5 m范围。采用105 mm焦段时成像结果如图6所示。

图6 成像实验结果 Fig.6 Results of imaging experiment
图6(a)为激光对目标处的照明效果,由于焦距长、目标距离近,实际成像范围内仅包含整个照明视场的一小部分。图6(b)和图6(c)分别为单次测量时的二维显示与三维显示结果。由于焦距较长,成像区域仅可包含6(a)中小部分区域,为方便选取了前方目标与墙面边缘部分进行成像。可见,系统可实现对目标的三维成像功能。图6(d)为多次测量后,各通道的测量方差,除少数点外,大部分通道的方差在0.2 m附近,也表明在此时的测量条件下,最终目标分辨率有望达到0.2 m。
3.3 距离误差分析
阵列成像的距离误差与激光测距系统的误差分析一致。主要误差源包括由激光脉冲强度引起的时刻判定误差δp、探测器随机游走误差δd、电路噪声误差δe、计时系统的计时误差δt等。总的距离误差可表示为:
(1)
式中:探测器随机游走误差、电路噪声误差等因素相对较小(10~100 ps量级),而计时系统的误差在实验前进行过标定,各通道的计时误差在140 ps以内,对应原距离分辨率约为2 cm,即使考虑最大计时误差为0.5 ns,对应的距离分辨率也小于7.5 cm。因此导致实验测量误差的主要因素在于激光脉冲强度引起的时刻判定误差。本方案采用的回波时刻确定方法为恒阈值方法,此种阈值处理电路相对简单易行,但缺点是具有较大的定时误差。其主要原因如图7所示。

图7 激光脉冲强度引起的距离测量误差 Fig.7 Range error caused by laser pulse amplitude
随着回波强度的变化,信号过阈值时间将在一定的范围内变化。引起回波强度变化的主要原因有:发射激光功率起伏、大气传输特性起伏、目标特性改变等。实验在室内进行,目标相同,因此对本次实验结果,引起强度起伏的主要因素为激光脉冲功率的起伏。由回波强度引起的时间误差与强度变化幅度和激光脉冲上升沿宽度成正比,近似为两者乘积。用示波器的余辉功能对激光脉冲输出信号进行了测量,示波器带宽1 GHz,测量结果如图8所示。
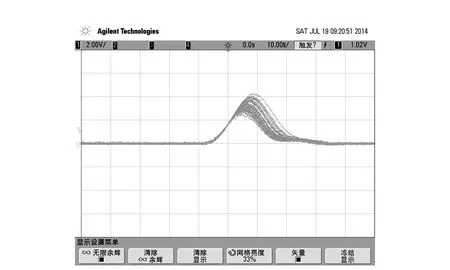
图8 激光脉冲强度变化测量结果 Fig.8 Measurement of laser energy variation
由图8可见,回波信号上升沿宽度约为10 ns,能量稳定性最大波动约为40%,其均方值约为13%(3δ),因此对应的时间误差约为10 ns×0.13=1.3 ns,基本与实验测量0.2 m距离误差结果一致。
采用更窄脉冲宽度的激光器是一种较为简便易行的提高距离分辨率的方法,同时脉冲宽度的降低可以减小激光发射平均功率,对降低系统功耗具有一定的优势。
4结论
本文采用8×8的APD阵列探测,研制了一套阵列激光三维成像探测器。探测器采用FPGA作为系统的阵列计时单元,实现了对64路加波信号的高精度计时处理。通过电子学测试实验表明单一FPGA的计时精度优于140 ps。激光三维成像实验表明,综合激光、模拟处理电路、FPGA计时电路等因素的系统整体分辨率可达0.2 m左右。实验结果表明,本接收机系统具有较高的时间和距离分辨能力。由于FPGA的可编程特性,本三维接收机还具有一定的可升级性,系统的计时分辨率有望进一步提升。距离分辨率的分析结果表明,激光脉冲上升沿宽度对改善系统距离分辨率具有明显,下一步将改进激光照明系统以及更换更窄脉冲激光器进行相应测试。同时实验过程中,部分通道具有较大的分辨率误差,需要对系统进行更深入的测试,分析其原因并加以改善。
参考文献:
[1]唐晓燕,高昆,倪国强.激光3D成像系统主被动探测技术的研究进展[J].激光与红外,2013,9:986-989.
TANG X Y,GAO K,NI G Q. Development of active/passive detection technology in 3D imaging lidar system[J].Laser&Infrared,2013,9:986-989.(in Chinese)
[2]郭裕兰,万建伟,鲁敏,等.激光雷达目标三维姿态估计[J].光学 精密工程,2012,22(4):843-850.
GUO Y L, WAN J W,LU M,etal.. Three dimensional orientation estimation for ladar target[J].Opt.PrecisionEng.,2012,22(4):843-850.(in Chinese)
[3]周森,郭永彩,高潮,等.基于三维激光扫描的移动大尺寸圆柱体工件长度快速检测系统[J].光学 精密工程,2014,22(6):1524-1530.
ZHOU S,GUO Y C,GAO CH,etal.. Rapid length measuring system for mobile and large scale cylinder workpieces based on 3D laser scanning[J].Opt.PrecisionEng.,2014,22(6):1524-1530.(in Chinese)
[4]史金龙,钱强,庞林斌,等.大尺度钢板的三维测量和拼接[J].光学 精密工程,2014,22(5):1165-1170.
SHI J L,QIAN Q,PANG L B,etal.. Three-dimensional measuremnt and registration for large scale plates[J].Opt.PrecisionEng.,2014,22(5):1165-1170.(in Chinese)
[5]BARENZ J,BAUMANN R,THOLL H D. Eyesafe imaging LADAR/infrared seeker technologies[C]. Proc. SPIE 5791,Laser Radar Technology and Applications X,Orlando,Florida,USA,August 05,2005:51.
[6]王锐.激光红外主被动复合导引系统[J].中国光学,2013,4:536-543.
WANG R. Compound guided system with active laser imaging and passive infrared imaging[J].ChineseOptics,2013,4:536-543.(in Chinese)
[7]ANTHONY W Y,MICHAEL A K,DAVID J H,etal.. Development effort of the airborne lidar simulator for the lidar surface topography(LIST) mission[C]. Proc. SPIE 8182,Lidar Technologies,Techniques,and Measurements for Atmospheric Remote Sensing VII,Prague,Czech Republic,September 30,2011:818207.
[8]MICHAEL J,GEORGE C,JOHN E,etal.. Advances in ladar components and subsystems at Raytheon[C]. Proc. SPIE. 8353,Infrared Technology and Applications XXXVIII,Baltimore,Maryland,USA,May 1,2012:83532F.
[9]EUGEN B,PETER Z,MICHAEL T. A multichannel high-resolution(<5 ps RMS between two channels) time-to-digital converter(TDC) implemented in a field programmable gate array(FPGA)[C]. 2011 IEEE Nuclear Science Symposium and Medical Imaging Conference,NSS/MIC 2011, IEEE Nuclear Science Symposium Conference Record,Valencia,Spain ,23 Oct - 29 Oct,2012:876-879.
[10]张勇,曹喜滨,吴龙,等.小面阵阵块扫描激光成像系统实验研究[J].中国激光,2013,40(8):0814001-1-12.
ZHANG Y,CAO X B,WU L,etal.. Experimental research on small scale risley prism scanning imaging laser radar system[J].ChineseJLasers,2013,40(8):0814001-1-12.(in Chinese)
[11]JIN Y W,SHI Z H. The 10-ps wave union TDC: Improving FPGA TDC resolution beyond its cell delay[C]. Nuclear Science Symposium Conference Record,Dresden,Germany,19-25,Oct. 2008.

王 飞(1981—),男,河北容城人,博士,助理研究员,2010年于哈尔滨工业大学获得博士学位,主要从事光电探测与激光三维成像技术方面的研究。E-mail:felixw@163.com

汤 伟(1985—),男,黑龙江绥棱人,博士,2009年于天津科技大学获得学士学位,2014年于中国科学院长春光学精密机械与物理研究所获博士学位,主要从事激光辐照效应、热控方面的研究。E-mail:twei222@163.com

王挺峰(1977—)男,山东文登人,研究员,硕士生导师,1999年、2002年于吉林大学分别获得学士、硕士学位,2005年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事光电观测设备研制和激光应用技术方面的研究。E-mail:wangtf@sina.com

郭 劲(1964—),男,吉林长春人,研究员,博士生导师,主要从事光电观测设备研制、激光与物质相互作用、激光应用技术等方面的研究。E-mail:guojin@ciomp.ac.cn
8×8 APD detector array
WANG Fei*, TANG Wei,WANG Ting-feng, GUO Jin
(StateKeyLaboratoryofLaserInteractionwithMatter,ChangchunInstituteofOptics,
FineMechanicsandPhysics,ChineseAcademyofScience,Changchun130033,China)
Abstract:In order to realize scannerless three dimensional(3D) laser imaging and analyze system parameters impact on ranging precision, a 3D imaging receiver with 8×8 elements is implemented. The receiver utilizes linear mode APD array. Analog signal amplification and threshold processing is applied to convert the optical signal to digital pulse. Then a 64 channel time to digital convertor array is implemented in FPGA, and 3D laser imaging receiver is invented which can acquire 3D information of target in real-time. First the principle of 3D imaging and construction of the receiver is introduced, including procedure and implementation of the array signal processing. Then electrical test and 3D imaging experiment are carried out for FPGA timing unit and receiver respectively, which indicate a timing resolution of 140 ps and range resolution of 0.2 m. At last, range resolution error is analyzed and we come to the conclusion that laser pulse energy fluctuation is the main error source.
Key words:3D imaging detector;APD detector array;high resolution ranging;tapped delay line
作者简介:
*Corresponding author, E-mail:felixw@163.com
中图分类号:TN249
文献标识码:A
doi:10.3788/CO.20150803.0422
文章编号2095-1531(2015)03-0422-06
基金项目:国家高技术研究发展计划(863计划)资助项目(No.2013AAXXX1024X)
收稿日期:2014-12-21;
修订日期:2015-02-23