舰用高精度激光陀螺惯导系统八次序转位方案设计
2015-03-12韩雪峰尹洪亮
韩雪峰,尹洪亮,尤 琪
(1.海军驻大连地区军事代表室,辽宁大连116021;2.中国舰船研究院,北京100192;3.武汉第二船舶设计研究所,湖北武汉430064)
0 引言
从20世纪90年代开始,激光陀螺惯导系统逐渐发展成为北约各国海军舰艇的主流装备,20世纪初我国海军也开始将激光陀螺惯导系统确定为水面舰船和常规潜艇惯性导航设备的主要发展方向[1-2]。当前国际上的高精度激光陀螺惯导系统,普遍采用了旋转调制自动补偿技术,该技术在不过多增加系统成本的情况下从系统角度消除器件误差对导航精度的影响,为提高惯导系统长航时、高精度导航能力提供了新的途径[3]。
转位方案直接影响到旋转式惯导系统的导航精度、整体结构和成本,设计合理的转位方案是实现旋转式惯导系统精度最大程度提高的关键[4]。国外资料中仅能查到单轴旋转系统的转位方案,即四位置转停方案,而双轴转位方案未见详细报道,尤其是旋转的次序,可见国外对该技术保密性的重视。另外,不恰当的转位方案不仅不能很好的调制误差,还可能会引起导航误差的不断增大并最终影响到系统的整体精度和性能。因此,双轴转位方案设计是值得深入研究的一项课题。
本文从探讨调制误差的旋转规律入手,提出双轴转位方案的设计原则,设计了一种八次序转位方案,对该方案下误差调制效果进行分析,并通过试验验证该方案的合理性。
1 激光陀螺惯导系统双轴旋转调制原理
旋转惯导系统相当于在捷联惯导系统的外面加上转动机构和测角装置 (旋转变压器、光栅等),导航解算也采用了捷联惯导算法,这样导航计算出来的依然是载体的位置和速度信息,而导航直接计算出来的姿态信息只是IMU的姿态,需要加上IMU相对于载体的转动角度 (由测角装置实时测量获得),就得到了载体的姿态信息。其原理如图1所示。
双轴旋转惯导系统通过双轴转位机构带动IMU,按照设计好的转位方案进行旋转,将惯性器件误差引起的导航误差调制掉,从而提高系统导航精度。以激光陀螺组件为例,调制后的惯性器件误差模型为[3]:

g为陀螺组件标度因数误差,包括非对称性标度因数误差和对称性标度因数误差两部分;Δ为陀螺组件安装误差;εp为陀螺组件漂移偏置误差;为陀螺组件测量的角速度值。
2 双轴转位方案设计原则的探讨
考虑单轴旋转,转轴上陀螺非标度因数误差对导航的影响比较大,采用正反旋转方式可以将该误差消除[5]。另外,为了降低转位机构的负担,通常采用转停方式,这样可以减少旋转时间在一个调制周期内所占的比例,提高系统的可靠性[6]。所以,双轴转位普遍采用两轴交替、正反转停的方式。然而,仅靠这2条原则还不能设计出合理的转位方案,有必要对各项器件误差被调制的旋转规律进行研究,从而为转位方案设计原则提供依据。
2.1 常值偏置误差被完全调制的旋转规律
旋转规律1:停止位置关于旋转中心对称,两对称位置停止的时间相等。
旋转将常值偏置误差调制成正余弦周期振荡形式,而在停止时仍然为常值,这就要求停止位置关于旋转中心两两对称,这样可以改变每个陀螺和加计常值偏置的符号。为了使其对角度误差的影响为0,应保证在两对称位置上停止的时间相等,这样才能使一个调制周期内每个陀螺和加计常值偏置的积分为0,即不会引起角度误差。
旋转规律2:旋转轨迹关于旋转中心对称,对称轨迹上关于旋转中心的对称点旋转速度对称。
在旋转阶段,陀螺和加计信号被调制成正余弦形式,要满足均值为0,必须使旋转轨迹关于旋转中心对称,如图2所示。而且,为了保证在旋转轨迹上对称位置常值偏置误差的影响大小相等,应尽量使这两对称点上的瞬时速度对称。
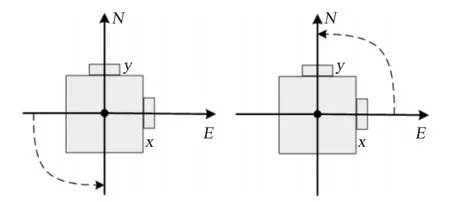
图2 旋转轨迹关于旋转中心对称关系示意图Fig.2 The schematic diagram of symmetrical relationship of the center of rotation about the rotary trajectory
2.2 标度因数误差和安装误差被最大程度调制的旋转规律
正反旋转能调制掉陀螺非对称性标度因数误差,旋转能调制掉正交性安装误差,若转轴与IMU坐标系的轴重合,能将所有安装误差调制。这些分析都比较基础,具体的旋转规律分析如下;
旋转规律3:对称轨迹旋转方向相反,两对称轨迹正反旋转的转速关于旋转中心对称。
在对常值偏置被完全调制的旋转规律分析中,两旋转轨迹只要对称就可以。而对于标度因数误差,必须保证对称轨迹的旋转方向相反,这样才能将非对称标度因数误差与旋转耦合的误差项抵消。
标度因数误差引起的角度误差是对由标度因数误差等效的陀螺漂移进行积分得到,为了保证角度误差为0,调制后的标度因数误差均值应为0,这就需要2条对称轨迹正反旋转的转速关于旋转中心对称。
旋转规律4:两对称停止位置启动/停止次数相等,正反旋转启动/停止的角加/减速度关于时间对称。
每个旋转次序不可能完全保持匀速,在启动和停止时有加、减速度,启动过程的轨迹和停止过程的轨迹并非完全一致,因此,必须保证两对称位置启动的次数相等,停止的次序也要相等。正反旋转的启动和停止的加减速度要关于时间对称,这样能够保证调制后误差均值为0。
安装误差的分析与标度因数误差一致,实际上这2项误差对角度误差的传播机理相似。
3 双轴转位方案设计原则
通过合理的双轴旋转,惯性元件主要误差项均能够调制成正余弦形式,惯性元件误差引起的数学平台累计误差角在一个转动周期内也能够调制成0。然而,判断惯性元件误差对导航的影响被调制掉,还要看一个转动周期内累计误差角度和速度是否关于0对称,这也是目前文献资料中都忽略的一点。结合4条设计规律,提出合理双轴转位方案的设计原则:
1)绕2个轴交替旋转,绕每个轴的旋转均具有正反性和对称性;
2)每个旋转周期内,正反旋转的转速和制动与启动的角加速度关于时间具有奇对称关系,而且每次旋转停止的位置关于转轴对称;
3)在一个转动周期内器件误差引起的累计角度误差或速度误差为0,且均值也0。
4 八次序双轴转位方案设计
设初始时刻,IMU坐标系p系、载体坐标系b系和东北天地理坐标系n系重合,从n系xnynzn的角度看,八次序双轴转位方案的旋转次序如下:
① IMU绕zn旋转180°;
② IMU绕xn旋转180°;
③ IMU绕zn旋转-180°;
④ IMU绕xn旋转-180°;
⑤ IMU绕xn旋转-180°;
⑥ IMU绕zn旋转-180°;
⑦ IMU绕xn旋转180°;
⑧ IMU绕zn旋转180°;
设八次序总周期为T,旋转速率为ω,总旋转时间为Tr,总停留时间为Ts。则每一次序旋转时间为Tr/8,停留时间为Ts/8。
由上述双轴转位方案,画出转位机构绕地理坐标系的东向轴旋转角度α和绕天向轴旋转角度γ的时间变化曲线如图3所示。
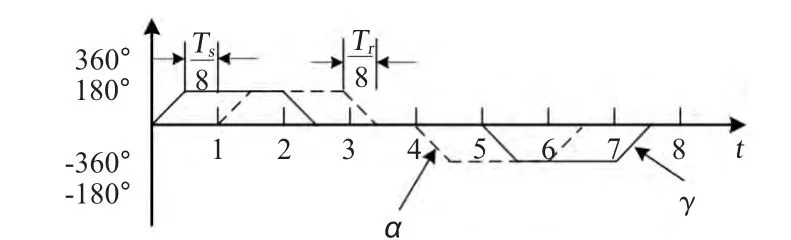
图3 八次序双轴转位方案Fig.3 Eight-order two-axis rotating scheme
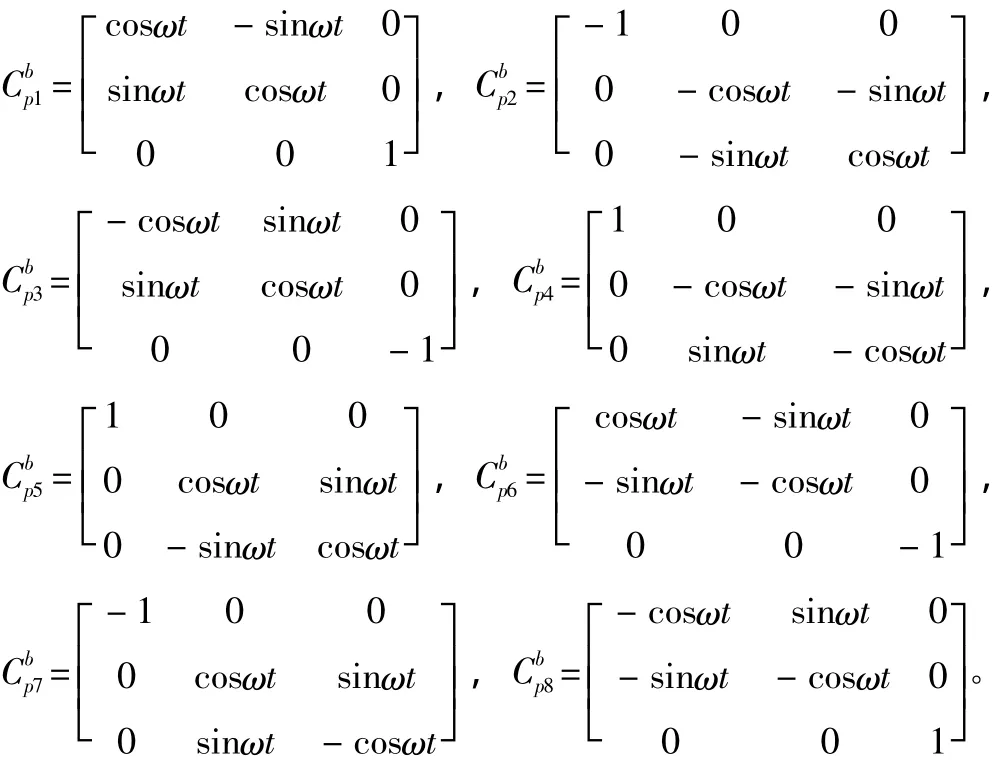
在八次序双轴转位中,转位机构有旋转和停止2种状态,旋转时横滚轴和方位轴交替旋转,b系到p系的方向余弦矩阵由α角和γ角依次确定如下:
5 八次序旋转方案对IMU误差的调制效果分析
5.1 陀螺漂移偏置的调制
由于八次序转位方案的停止位置对称且停止时间相等,很明显在停止阶段漂移被调制平均,对角速度无累积误差。根据b系到p系的方向余弦矩阵可计算出1~8旋转次序陀螺漂移引起的n系下等效角速度误差(δωb
ib)i(i=1,2,…,8),进一步计算出1 ~8 旋转次序陀螺漂移偏置调制后引起的累积角度误差为:
上式说明采用双轴八次序旋转方案,一个完整旋转周期内东北天3个方向上的等效陀螺漂移累积误差为零,即该方案可以完全补偿3个轴的陀螺漂移。
5.2 非对称性标度因数误差的调制
非对称性标度因数误差引起的角速度误差:

从上式可以看出,非对称性标度因数误差与敏感轴输入角速度相乘后相当于陀螺漂移偏置,可以被调制平均。
5.3 对称性标度因数误差的调制
对称性标度因数误差引起的角速度误差:

将相关量代入式(4)得1~8次序对称性标度因数误差引起的角速度误差()i(i=1,2,…,8),在一个调制周期内,陀螺对称性标度因数误差引起的等效角速度误差等于各次序角速度误差的和,即为:
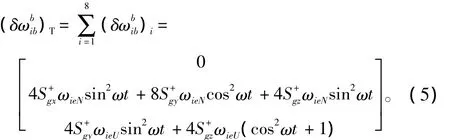
上式在一个周期内积分不为0,说明该方案无法调制对称性标度因数误差,上式矩阵中第一项为0是因为该分析是在静基座下,地球自转角速度东向分量为0,不存在与对称性标度因数耦合的误差。
5.4 安装误差的调制
由于旋转机构的旋转角速度ω远大于地球自转角速度,所以分析旋转对安装误差调制效果时,可忽略地球自转角速度,在小角度假设下,陀螺组件安装误差可表示为:
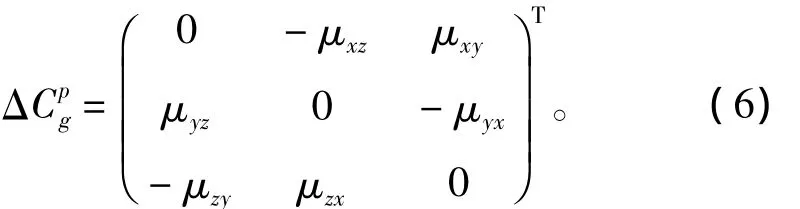
其中 μij(i=x,y,z;j=x,y,z;i≠ j)为第 i坐标轴上陀螺的安装误差角度。
利用安装误差及相关分量计算出1~8旋转次序安装误差调制后引起的累积角度误差,累计求和得一个周期内安装误差调制后引起的累计角度误差为:

上式说明采用双轴八次序旋转方案,在不考虑转轴与IMU坐标系的轴存在偏角情况下,一个完整旋转周期内安装误差引起的累积角度误差为0。
6 试验验证
为了对转位方案的误差调制效果进行验证,利用双轴转台,与90型激光陀螺惯导系统 (陀螺零偏约0.003°/h)构建半实物仿真系统。用转台代替双轴转位机构,按照设计好的转位方案进行旋转,旋转速度10°/s,停止时间5 s。惯导对准后进入纯惯性导航,试验共计12天,检验系统长时间的导航精度。图4和图5分别是90型激光陀螺惯导系统位置误差和速度误差曲线。
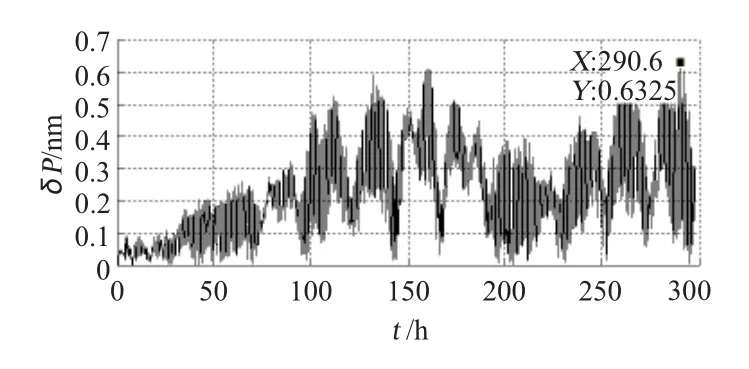
图4 12天试验位置误差曲线Fig.4 The curve of position error for 12 day
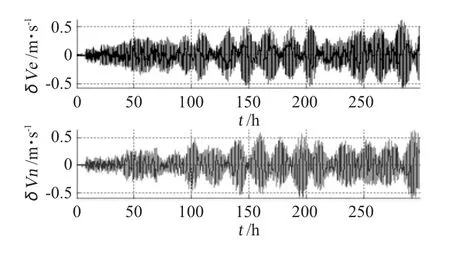
图5 12天试验速度误差曲线Fig.5 The curves of velocity errors for 12 day
从图3和图4可看出,速度误差曲线和位置误差曲线没有随时间发散项,导航12 d位置误差最大值0.632 5 nm,说明本文设计的转位方案能够调制掉惯性器件误差,惯导系统误差不再随时间累积,大大提高了系统长时间导航精度。
7 结语
本文对激光陀螺旋转惯导系统转位方案设计进行了研究,得到以下结论:
1)双轴转位方案采用2轴交替转停旋转的方式能够合理抵消IMU误差对惯导系统的影响。
2)评价一个转位机构设计好坏的准则是一个调制周期内器件误差引起的累积误差是否为0,且均值为0。
3)合理的双轴转位方案能够将激光陀螺IMU大部分误差调制掉,剩余误差对系统误差的影响可以忽略,从而大幅度提升系统长时间导航精度。
本文对提出的转位方案设计原则和设计的转位方案可以应用于舰载激光陀螺旋转惯导系统中。
[1] LEVINSON E,GIOVANNI C S.Laser gyro potential for long endurance marine navigation[C]//IEEE Position Location and Navigation Symposium,1980:115 -129.
[2] 袁保伦.四频激光陀螺旋转式惯导系统研究[D].长沙:国防科技大学,2007.
[3] 张宇飞,陆权聪,翁海娜.基于IMU旋转的船用激光导航系统分析与设计[J].海洋技术,2009,28(2):88-91.
[4] HIBBARD R,WYLIE B,LEVISON E.Sperry marine MK -49,The world's best ring laser gyro ship's inertial navigation system[C]//JSDE Proceedings.Orlando,FL,November 1996.
[5] LEVISON E,MAJURE R.Accuracy enhancement techniques applied to the marine ring laser inertial navigator(MARLIN)[J].Journal of The Institute of Navigation,1987,34(1):64 -86.
[6] LEVISON E,TER HORST J,WILCOCKS M.The next generation marine inertial navigator is here now[C]//IEEE Position Location and Navigation Symposium,1994:121-127.