船舶电力推进系统制动能量回馈利用方法研究
2015-03-12杨祥国林治国陶烽伟丰浩宇
杨 诚,杨祥国,陈 辉,林治国,陶烽伟,田 畾,丰浩宇
(武汉理工大学能源与动力工程学院,湖北武汉430063)
0 引言
随着电力电子技术的日趋成熟,电力电子技术与大功率交流电机变频调速技术在船舶得到了广泛的应用。电力推进船舶与传统推进系统船舶相比具有效率高,灵活性强等优点,所以船舶电力推进技术的发展在国内外受到了高度重视,并成为了今后船舶行业的重点研究和发展对象[1]。
对于经常启停和变速的交直交变频器驱动的船舶电力推进系统而言,在制动过程中电动机处于再生制动状态,电动机转子、船体本身和螺旋桨由于惯性而具有巨大的机械能,可以将其转化为电能后回馈利用[2]。但传统的交直交变频器,因为其整流环节采用的是不可全控的晶闸管,没有逆变功能。因此其电路仅具有能量的单向流动性,回馈能量不能注入电网。对此,本文提出了三电平四象限变流控制技术在船舶电力推进系统中的利用。该方法实现了双向变流,旨在通过并网技术将船舶的回馈能量回馈到船舶电网中,实现能量回馈利用。这大大减少了能量的消耗,有利于“绿色船舶”的发展,但目前国内外对船舶电力推进制动能量的回馈研究很少。
1 制动能量回馈回收方法
目前,国内外对制动能量的回收方法主要有电阻消耗型、电容储能型、逆变回馈型、飞轮储能型4 种[3]。
1.1 电阻消耗型
电阻消耗型再生制动能量的主要回收装置是吸收电阻和IGBT斩波器,两者之间的配合实现了能量的恒压吸收[4],通过控制IGBT斩波器的导通比来改变电阻的消耗功率,将直流网侧的电压维持在某一设定的范围内,利用吸收电阻消耗制动能量。这种方法能量不能再生利用,而且消耗的热能会使周围环境的温度升高,造成不必要的元器件损坏。
1.2 电容储能型
电容储能装置是将多个超级电容元件通过并、串联构成一个满足所需容量的电容器组,电容储能装置除了超级电容组之外还有直流快速断路器、双向DC/DC变换电路、控制电路和电压电流传感器等,用来控制电容器组的充、放电。
1.3 逆变回馈型
逆变回馈型再生制动能量吸收方案采用PWM逆变器,其将原有的二极管整流电路改为可控硅整流电路,或者在原有的整流支路两端重新并联一组可控硅整流电路来实现。随着电力电子技术的日趋成熟,可靠的逆变回馈型再生制动能量利用技术将会得到广泛的应用。
1.4 飞轮储能型
飞轮储能型制动能量吸收装置主要是利用飞轮旋转的惯性,把制动的能量通过电动机转化为飞轮的动能储存起来。这种方法节能效果很好,但飞轮的体积过大,而且这种装置比较昂贵。
从能源节约和成本的角度综合考虑,把三电平四象限变流控制技术运用在船舶电力推进系统制动能量回收上,可以很好地利用再生能量,降低能量损耗,降低成本。
2 系统设计
图1为典型的船舶电力推进系统,它直接利用变频器把发电机组输出的交流电变频后供电动机使用,理想情况下其推进效率大概在0.95-0.97之间,效率较高。当船舶制动时,由于没有能量回馈装置,电动机和螺旋桨的旋转机械能将损失一部分,剩下的部分通过变频器的回馈。若这部分能量不加以处理,将会使直流母线的电压升高,升高的这部分电压称为泵升电压。过高的泵升电压会烧毁变频调速装置,对整个推进系统造成不良的影响[5]。

图1 船舶电力推进系统Fig.1 Ship electrical propulsion system
为此,设计了如图2的反馈系统对制动能量进行回馈再利用。系统的总体结构主要由主电路、控制单元 (DSP)、驱动与保护电路、电网电压、信号调理电路等组成。驱动与保护电路实现PWM触发信号的功率放大与电气隔离。电网电压和电流由霍尔电压传感器隔离采样和调理电路调理后传递给DSP的A/D转换单元,构成系统的受控对象。系统检测电网电压并对其进行相应的控制,使电网电压保持稳定。

图2 船舶电力推进制动能量反馈系统Fig.2 Ship electrical propulsion braking energy feedback system
此时装置将多余的再生制动能量通过双向逆变系统以及多个变压器后回馈到电网中。当船舶在正常行驶的时候遇到风浪时,电机的转速呈上下波动状态,这时回馈的量较少,可以直接供生活用电。当船舶需要急速制动时,电机的转速几乎为直线下降,回馈的能量较多,这时回馈的能量一部分供给生活用电,剩余部分通过一个绝缘栅门双极型晶体管,把电网中的交流电转化为直流电存储在储能单元里面。其中储能单元由双向DC/DC变换器和储能装置构成,通过控制双向DC/DC变换器的开关状态来实现储能单元的充放电。当船舶加速或者起航的时候,储能单元释放制动时储存的能量供其使用。这样可以减少发电机组的发电量,从而实现能源的节约。其中能量转变形式为交—直—交,在交流电源与交流输出之间有一个中间直流环节,所以这种形式属于间接式。按照中间直流环节直流电源性质不同,逆变器可以分成电压型和电流型两种,其中电压型在理想情况下是一个内阻为0的恒压源,其直流电压波形较平直,中间环节并联大电容滤波,输出的交流电压是阶梯波或者矩形波。电源型逆变器在理想情况下相当于一个恒流源,直流电流较平直,中间环节串联大电感滤波,输出的交流电流是阶梯波或者矩形波。
在能量的回馈中,对于经常制动的机械,电流源型逆变器比电压源型逆变器更具有优势。因为电流源型逆变器可以实现四象限运行,便于能量的回馈[6]。如图3,当电动机运行时,UCR控制角α<90°,处于整流工作状态下,Ud为直流回路的电压,其极性为上正下负,当电流Id从正端流向逆变器CSI时,CSI处于逆变工作状态下,此时输出电压的频率关系为w1>w,电动机的转速为w,图3(a)所示为电功率P的传送方向,如果降低变压变频器的频率w1,使频率关系为w>w1,同时增大UCR的控制角,使α>90°,则电动机进入发电工作状态,逆变器进入整流工作状态,可控整流器进入有源逆变的工作状态,此时电流Id方向保持不变,而直流电压Ud立即反向,电动机将电能回馈给交流电网,如图3(b)所示。

图3 电流源型系统电动和回馈制动两种运行状态Fig.3 Two running states of electric and regenerative braking for current source system
通过电压型的交-直-交变压变频调速系统来实现回馈制动以及四象限运行存在巨大困难,因为其中间直流环节存在大电容钳制电压极性的现象,并不能即刻反向,同时电流因为器件单向导电性也不能反向,因此在原有装置上并不能实现制动回馈,只有在直流环节并联上电阻来实现能耗制动,或是在UCR反并联一组反向整流器,使反向的制动电流通过,实现回馈制动[7]。
若只考虑制动能量回馈,选择电流源型系统结构较为简单。但其功率因数不及电压源型系统,且谐波较大。综合考虑,该系统采用电压源型系统。
3 数学模型及其仿真
图4是四象限PWM变流器的基本拓扑结构。

图4 三相半桥电压型PWM变流器拓扑结构Fig.4 Three-phase half-bridge PWM converter topology
VSR一般数学模型在三相静止对称坐标系(a,b,c)中具有便于理解、描述直观等特点。只是在这种数学模型中,VSR交流侧均为时变交流量,对控制系统的设计不利。基于以上两点,采取坐标变换的方法将三相相对静止坐标系(a,b,c)转换成以电网基波频率同步转换的(d,q)坐标系。通过坐标变换以后,三相对称静止坐标系下的基波正弦变量就转化成了同步旋转坐标系下的直流变量,由此使控制设计得以简化[8]。三相VSR一般数学模型 (三相静止对称坐标系下)经同步旋转坐标变换以后,即转换成三相VSR的dq模型。
由图4所示的电路可以得到PWM整流器在abc三相静止坐标系下的方程:

式中:U为三相电压;I为三相电流,整流方向为正向;x=a,b,c;L为网侧滤波电感;R为网侧滤波电阻;S为逻辑函数,S=0表示下桥臂导通,S=1表示上桥臂导通;k=a,b,c;U为直流侧电容电压。
把三相静止坐标系转换成dq坐标系,其数学模型为:
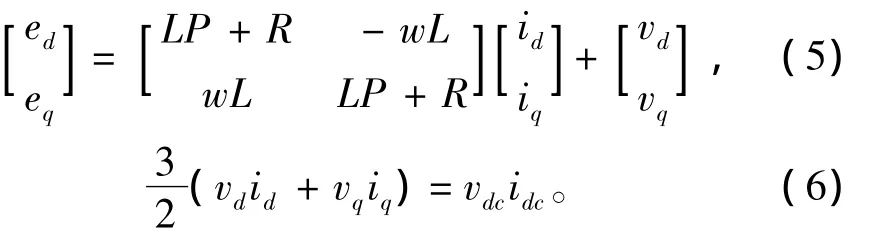
式中:e为电网电动势矢量E在d,q分量;i为交流侧电流矢量I在d,q的分量;v为交流侧电压矢量V在d,q分量。
假设电机在制动时产生的是标准三相交流电,三相电A、B、C的频率都为50 Hz,相位差为120°,产生的交流电压为380 V;中间直流环节的额定直流电压为600 V。利用Matlab/Simulink搭建仿真模型,如图5所示。
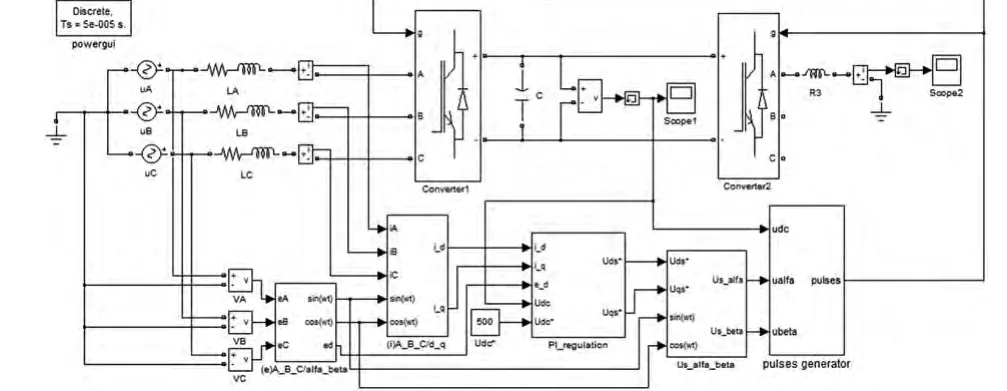
图5 制动能量回馈仿真模型Fig.5 Simulation model of the braking energy feedback

图6 制动能量回馈仿真结果Fig.6 Simulation result of the braking energy feedback
从时间0开始制动,图6(a)为直流侧电压的变换波形。直流侧电压从0开始不断升高,超过额定电压后开始储能,把多余的电能供给生活用电使用或者储存在储能单元里面,这样不仅可以保持电网电压的不超过额定值,而且还节约了能源。交流侧电流如图6(b)所示,其输出为一系列交流电,该波形的变化与直流侧的输出电压相似,制动开始后,电流的幅值不断升高并且高于额定电流。用于储能装置的作用,电流不会长时间超过额定电流,这样保证了整个电网系统的安全。当船舶启动、加速时,储能单元放电供电网使用。该方式不仅保持了电网的稳定,并且提高了船舶的能效利用率,推动了“绿色船舶”的发展。
4 结语
针对船舶电力推进装置的制动能量,本文对比和总结了机车制动能量回馈的回收方法,提出了三电平四象限变流器进行双向变流的新技术,并对其进行了系统框架的设计和数学模型的分析。该系统能够很好的实现能量回馈再利用,对于船舶能源的节约具有很好的价值。这对今后研究船舶制动能量回馈的回收利用具有参考价值,对于“绿色船舶”的发展有着重要的意义。
[1] 盖金龙.船舶电力推进实验平台监控设计与能效研究[D].大连:大连海事大学,2014.
[2] 赵红,郭晨,吴志良,等.船舶电力推进系统的建模与仿真[J].中国造船,2006(4):51-56.
[3] 李国玉.城市轨道交通制动能量的回收方案[J].中国科技信息,2014(19):49-50.
[4] 于喆,汤尧.城市轨道交通再生电能回收技术方案分析与探讨[J].轨道交通,2010(11):82-85.
[5] CASADEI D,SERRA G,TANI A,et al.Performance analysis of a speed senseless induction motor drive based on a constant switching frequency DTC scheme[C]//Conference Record of the 2000 IEEE Industry Applications Society Annual Meeting,2000:1360 -1367.
[6] 邓国栋.电力拖动系统自动控制和安全保护[J].现代物业,2011(8):250-251.
[7] 顾春雷,陈中.电力拖动自动控制系统与MATLAB仿真[M].北京:清华大学出版社,2011:165-170.
[8] 马先芹,王久和,等.一种新型电压型PWM整流器混合控制研究[J].电源技术,2015(2):382-385.