基于AHP-模糊综合评判法的有人机/无人机协同作战效能评估
2015-03-10张永利孙治水周荣坤
张永利,孙治水,周荣坤
(中国电子科技集团公司电子科学研究院,北京100041)
基于AHP-模糊综合评判法的有人机/无人机协同作战效能评估
张永利,孙治水,周荣坤
(中国电子科技集团公司电子科学研究院,北京100041)
摘要:有人机与无人机的编队协同作战是未来空战的一个重要模式,是争取未来空战胜利的重要方式。对有人机与无人机的编队协同作战进行效能评估,分析了影响有人机与无人机的编队协同的主要因素,建立了有人机与无人机的编队协同作战效能评估指标体系和模型,采用AHP确定系统性能指标权重,利用层次分析法(AHP)-模糊综合评判法评价性能指标。结果表明此方法可以科学合理地对有人机与无人机的编队协同作战效能进行评估,为有人机与无人机的编队协同作战效能评估提供了新的研究视角。
关键词:有人机;无人机;层次分析法;模糊综合评判;效能评估
0引言
有人机在战时执行超视距侦察、监视、引导任务时的隐蔽性和安全性方面存在弱点,使其在恶劣环境下的生存能力低于无人机,同时有人机还存在驾驶人员所能承受的工作时间的限制;而无人机在任务载荷能力和机载设备性能方面又存在一定的局限性。有人机/无人机编队优势整合,以1架有人机与1架无人机或1架有人机与多架无人机2种形式,把原来对无人机实施指挥的地面控制系统移植到空中飞机上,由有人机后座的武器控制人员根据战场态势制定编队决策并在任务的执行过程中全程进行控制。有人机/无人机协同作战可以提高有人机/无人机战场生存概率,准确及时地反馈战场信息,执行多样化的作战任务[1-5]。
有人机/无人机编队协同体现的战场优势,使得各国开始尝试这一方面的战术演练。达索公司最新公布的宣传片中首次出现“阵风”战斗机、“猎鹰”公务机以及“神经元”无人作战飞机进行编队飞行的画面,说明法国已经做出将有人机/无人机编队方式用于实际护航的尝试。美国海军的X-47B与F/A-18F组合成功地在366 m的空中以193 km/h的速度进场着陆,完成首次有人机/无人机在同一航母起降,说明美国在这一方面已经领先一步[6]。
有人机/无人机协同作战使得各种资源得到充分、合理的配置,极大地提高了作战效能。因此对于有人机/无人机协同作战效能进行科学合理的评估具有重要的现实意义。本文针对构造的有人机/无人机协同作战效能评估指标体系,利用层次分析法和模糊综合评判法建立作战效能评估模型,并用算例对作战系统效能评估进行验证。
1构建有人机-无人机协同作战效能评估体系
合理地构建有人机/无人机协同作战系统效能评估指标体系,可以简单、全面而又真实地反映系统的效能。有人机/无人机协同作战效能评估指标的选取,需要遵循系统性、简明性、客观性、时效性、可测性、完备性、独立性、一致性原则。
1.1影响评估指标体系的主要因素
为了将多层次、多因素的评估问题进行科学的量化处理,采用模糊综合评判法构建有人机/无人机协同作战效能评估指标体系二级评判模型,有2个层次,即能力层和技术指标层。能力层的因素集包含以下6个方面:协同攻击能力、指挥控制决策能力、数据链能力、雷达能力、任务可靠度和飞机可用度。技术指标层包括侦测能力、干扰能力、信息接收能力、信息处理能力、数据共享能力、生存力、攻击时效性、武器效能、损伤评估能力、态势感知能力、指挥决策能力和辅助决策能力[7]。
1.1.1 协同攻击能力
有人机/无人机协同攻击是多机协同空战决策的核心内容之一。无人机在预警机指挥下,各机相互协调配合,合理分配攻防资源,充分发挥各机的自主攻击能力,对夺取制空权、提高我机作战效能和生存力、有效杀伤敌机具有重要意义。对有人机/无人机协同攻击效能指标的选取与生存力、协同攻击的作战时效性、武器效能指数和损伤评估能力有关。
1.1.2 指挥控制决策[8]
有人机/无人机协同作战指挥决策系统是指挥者根据态势感知信息,凭借着机载计算机辅助工具和主观决策来为作战任务的随后阶段做出分配控制的过程,二者优势互补,协同决策,高效地完成作战任务。有人机/无人机协同作战指挥决策系统包括以下几个关键指标:态势感知能力,指挥决策能力和辅助决策能力。
1.1.3 数据链能力
数据链的整体能力是由信息接收能力、信息处理能力和数据共享能力这几部分组成的。无人机在执行任务时所获取的巨大信息量单纯依靠机上设备进行处理比较困难,实时传输又会增加数据传输系统的负担。所以有人机/无人机协同作战不仅要求无人机具备一定的对目标信息进行预处理的能力,同时要求与有人机协同的通信能力,能够保证空战中各平台的信息流通,使作战各平台在信息化领域对抗中更加占据优势。
1.1.4 雷达能力
有人机/无人机协同的雷达能力包括侦测能力和干扰能力。侦测能力包括目标侦察能力和目标识别能力。无人机装载高性能的雷达设备,配合有人机进行联合侦察,进而扩大空中的纵深探测范围,延伸作战半径,为目标识别奠定基础;有人机与无人机协同配合,利用无人机良好的机动性和隐身性可以对敌方同一目标或多目标进行多角度、全方位的高度识别,弥补了雷达盲区所带来的困扰,提高了发现目标的概率。干扰能力包括有源干扰、无源干扰和欺骗式干扰,其中,有源干扰在空战中较为常见,且以噪声压制式干扰为主,其它2种作为辅助手段进行对敌干扰。
1.1.5 任务可靠度
有人机/无人机协同任务系统的可靠度是指在执行任务飞行期间内不出故障以至影响任务完成的概率,此概率与系统的平均故障率有关,也与执行任务所需要的飞行时间长短有关。
设有人机/无人机协同任务系统子系统i的可靠度Ri(t)服从负指数分布,数学模型如下[9]:
(1)
式中:Ti为系统i开始工作时间;λi为系统i的平均故障率。
根据有人机/无人机协同所需要完成任务的不同,对其可靠度衡量指标亦有所不同。例如在有人机/无人机协同执行快速打击任务时,协同状态下系统任务可靠度R(T)为[10]:
R(T)=RC2·RCD[1-(1-Rradar·RL1)m]·
RLA·RL2·Rmissile
(2)
式中:RCD为通信设备可靠度;RC2为指控设备可靠度;Rradar为制导站可靠度;RLA为发射设备任务可靠度;RL1为数据链端机(有人机)任务可靠度;RL2为数据链端机(无人机)任务可靠度;Rmissile为导弹任务可靠度。
1.1.6飞机可用度
有人机/无人机协同,要求保证该系统中各飞机均具备作战所需的实际良好率,即飞机实际可用度。根据飞机实际使用一段时间后的统计数字,用有人机与无人机随时可用架数与实际装备架数之比来表示实际良好率。
1.2有人机/无人机协同作战效能评估指标体系结构
有人机/无人机协同作战效能评估指标体系结构如图1所示。
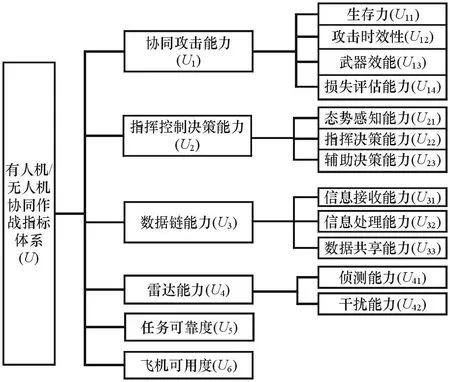
图1 有人机-无人机协同作战效能评估指标结构图
2层次分析法[11]
设有n个因素A1,A2,…,An,对它们进行两两比较,对n个因素A1,…,An比较之后,得到一个n×n阶的判断矩阵A=(aij):
(3)
3模糊综合评判法评估步骤[12-13]
有人机/无人机协同作战效能评估体系涉及到很多难以精确描述的不确定因素。模糊综合评判法在定性分析影响系统效能的各指标因素的基础上,定量对各指标因素做出综合决策。模糊综合评判法是按多项模糊的准则参数对被选方案进行综合评判,再根据综合评判结果对各备选方案进行比较排序,选出最好的方案。与综合评判有关的有限论域有准则论域和评语等级论域2种。对各指标建立评语集,分为4个评价等级(很好,好,一般,差),对应评分集为{10.80.60.4}。
模糊综合评判法的数学模型由因素集、评判集和模糊矩阵3个要素组成,分为4步[9-11]:
(1) 因素集U={u1,u2,…,ui},其中ui(i=1,2)表示影响事物评判值的第i个因素;
(2) 因素评判集V={v1,v2,…,vj},其中vj(j=1,2)表示影响事物评判值的第j个等级;
(3) 单因素评判,对单个因素Ri(i=1,2)评判,得到单因素评判模糊矩阵:
(4)
(4) 综合评判,可得综合评判B=W∘R=(b1,b2,…,bi),其中∘表示合成运算。对于合成运算,典型模型有“加权平均型”、“主因素决定型”、“混合型”3种算法。其中加权平均型算法考虑诸因素(或诸指标)在评价中所处的地位或所起的作用不尽相同,表示为:
(5)
式中:ai(i=1,2,…,n)为各因素权重。
4使用层次分析法确定各指标权重
确定权重的方法很多,应用层次分析法来量化指标权重。根据Saaty表度法,对有人机/无人机协同作战效能评估指标体系同一层级的各元素进行两两比较,构造判断矩阵,确定相应的指标权重。
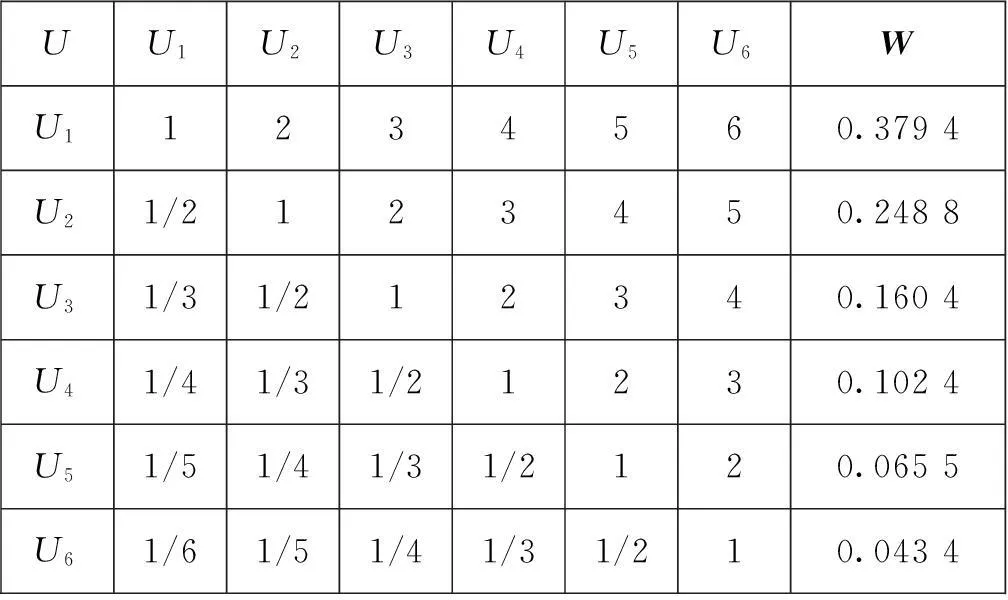
表1 第1层指标体系权重U1,U2,U3,
λ=6.123 2,IC=0.024 6;IR=1.26;RC=IC/IR=0.024 6/1.26=0.019 5。

表2 第2层指标体系权重U11,U12,U13,U14的计算
从计算结果看出,RC<0.1,表明上述判断一致性可以接受,即权重值W=(0.379 4,0.248,0.160 4,0.102 4,0.065 5,0.043 4)T是可以接受的。同理可得第2层各元素的权重,并分别对判断矩阵进行一致性检验,得到各评判指标的权重。
λ=4.031 0,IC=0.031;IR=0.89;RC=IC/IR=0.031/0.89=0.034 8。
从计算结果看出,EC<0.1,表明上述判断一致性可以接受,即权重值W1=(0.465 8,0.277 1,0.161 1,0.096)T是可以接受的。

表3 第2层指标体系权重U21,U22,U23的计算
λ=3.009 2,IC=0.009 2;IR=0.52;RC=IC/IR=0.009 2/0.52=0.017 7。
从计算结果看出,EC<0.1,表明上述判断一致性可以接受,即权重值W2=(0.539 0,0.297 3,0.163 8)T是可以接受的。

表4 第2层指标体系权重C31,C32,C33的计算
λ=3.009 2,IC=0.009 2,IR=0.52;RC=IC/IR=0/0.52=0。从计算结果看出RC<0.1,表明上述判断一致性可以接受,即权重值W3=(0.571 4,0.285 7,0.142 9)T是可以接受的。

表5 第2层指标体系权重C41,C42的计算
λ=2,IC=0;从计算结果看出,RC<0.1,表明上述判断一致性可以接受,即权重值W4=(0.666 7,0.333 3)T是可以接受的。
5有人机/无人机协同作战效能评估体系
有人机/无人机协同作战效能评估指标体系分为2个层次:第1层6个指标,第2层12个指标。根据层次分析法,已经确定各指标的权重。由专家意见,影响有人机/无人机协同作战系统效能各个指标的模糊评语如表6所示。
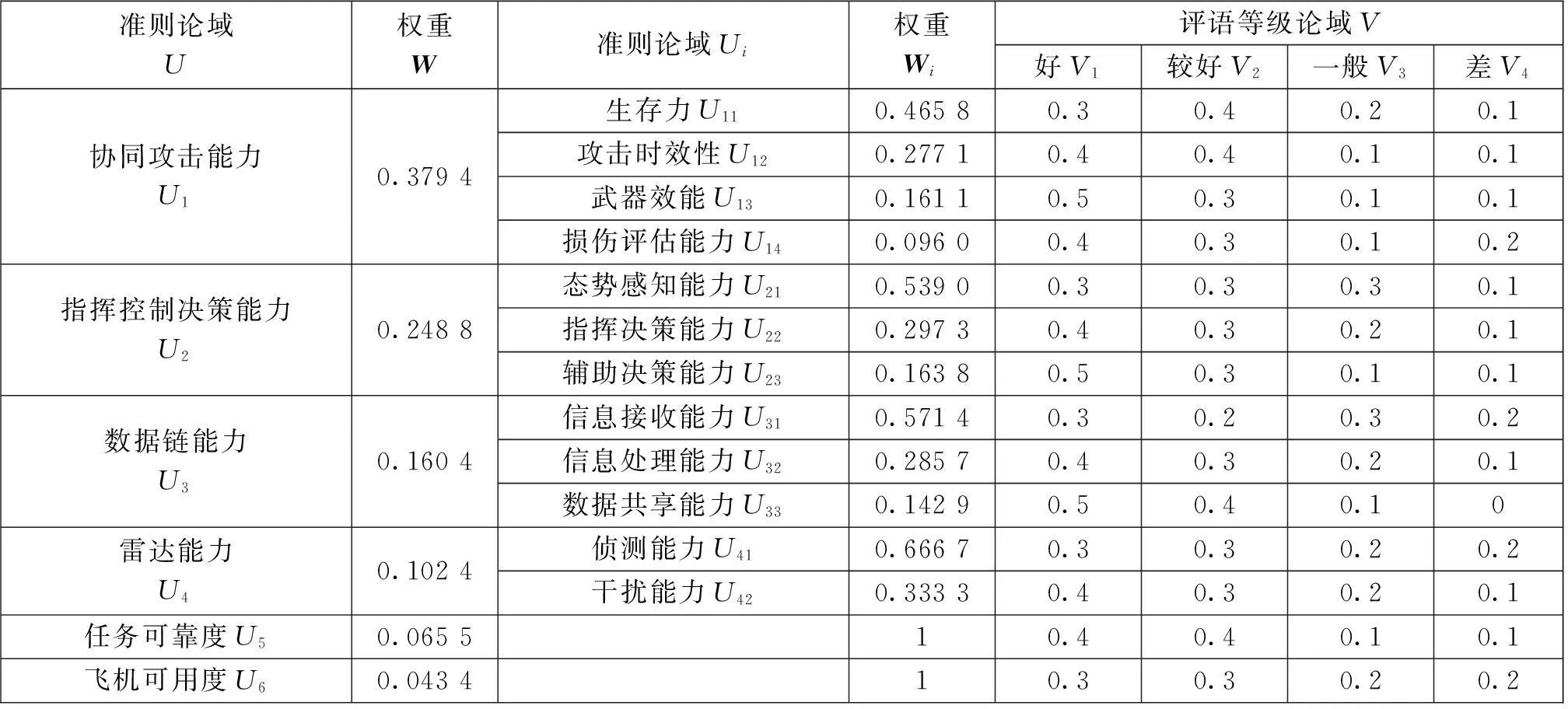
表6 有人机/无人机协同作战效能指标等级评语表
由上面计算所得的Ui的指标权重Wi和评语集合V,被评判对象相对于各个指标的模糊评语,即Ui×V上的模糊矩阵是Ri,进行下列模糊变换:Bi=Wi·Ri,i=1,2,…,n。
对于第1层各个指标U的模糊评语Bi(i=1,2,…,4):
归一化计算可得:
B1=(0.365 90.374 30.146 60.109 6)
同理可得B2,B3,B4,B5,B6的值:
B2=(0.362 50.300 00.237 50.100 0)
B3=(0.357 10.257 10.242 90.142 9)
B4=(0.331 10.298 00.198 70.172 2)
B5=(0.400 00.400 00.100 00.100 0)
B6=(0.300 00.300 00.200 00.200 0)
由以上结果可以看出,该指标体系在协同攻击能力、指挥控制决策能力、数据链能力、雷达能力、任务可靠度和飞机可用度6项指标中“好”与“较好”的隶属度分别是0.743 8,0.662 5,0.614 3,0.629 1,0.800 0,0.600 0,评判结果比较客观。
将Bi合成一级评判矩阵B=[B1,B2,B3,B4,B5,B6],则被评判问题相对于全部指标的二级评判矩阵为(按加权型算法计算):
A=WB=(0.360 80.327 70.189 30.122 3)
这一评估结果表明有人机/无人机协同作战能力,36%的人认为是很好,32%的人认为是好,19%的人认为是一般,12%的人认为是差。将模糊评语A转化为总得分。对若干个方案进行排序,则需将综合评语A再综合为一个数。为此采用加权平均法对每个等级与权重分数赋值V情况如表7所示。

表7 等级与权重值分数设定情况
从而得到有人机/无人机协同作战效能评估方案得分为:

对于其它的有人机/无人机协同作战效能系统,可以按照上述方法进行同样的综合评判,最后根据评判结果选出较优的系统结构。
6结束语
有人机/无人机编队协同,形成独特的作战体系,在网络中每架飞机都具备不同功能和任务的节点,可以更加准确地反馈战场信息,更加机动灵活地处理突发事件,同时缩短信息传输时间和步骤,提高编队作战效率。文中通过对有人机/无人机协同作
战效能系统的主要因素进行分析,建立有人机/无人机协同作战效能评估体系模型,采用层次分析法与模糊综合评判法相结合,对有人机/无人机协同作战效能进行评估,为有人机/无人机协同作战系统的构成与优化提供定量依据。
参考文献
[1]刘万俊,傅裕松,翁兴伟.有人机-无人机群协同空战目标分配算法[J].火力与指挥控制,2012,37(5):124-127.
[2]马向玲,雷宇曜,孙永芹,等.有人/无人机协同空地作战关键技术综述[J].电光与控制,2011,18(3):56- 60.
[3]马向玲,雷宇曜.有人/无人机协同作战关键技术[J].火力与指挥控制,2012,37(1):78-81.
[4]刘跃峰,张安.有人机/无人机编队协同任务分配方法[J].系统工程与电子技术,2010,32(3):584-588.
[5]蔡俊伟,龙海英,张昕.有人机/无人机协同作战系统关键技术[J].指挥信息系统与技术,2013,4(2):10-14.
[6]黄伟,王野,卢士玉.“狩猎组合”浅谈有人机与无人机编队告[J].兵工科技,2015(4):61-63.
[7]阴小晖.有人机/无人机协同作战效能评估研究[D].南昌:南昌航空大学,2013.
[8]陈晓栋,刘跃峰,陈哨东.有人/无人机编队指挥控制系统决策分配[J].电光与控制,2013,20(5):31-36.
[9]魏勇,黄波,王新华.区域防空武器系统可靠性建模与仿真[J].舰船科学技术,2012,34(12):99-102.
[10]龙光正,刘铭,张宏亮.基于网络中心制导的防空导弹武器系统可靠性建模[J].火力与指挥控制,2010,35(12):42-49.
[11]张永利,刘春旭.基于Vague集TOPSIS法的防空战场信息感知系统效能评估[J].中国电子科学研究院学报,2013,8(4):373-376.
[12]郭辉,徐浩军,任博.基于模糊综合评判的预警机作战效能评估[J].数学的实践与认识,2012,42(4):102- 106.
[13]陈松辉,邱宏理.基于AHP和模糊综合评判法的登陆作战效能分析[J].舰船电子工程,2013,33(2):91- 93.
Efficiency Evaluation of Manned/Unmanned Aerial Vehicles Coordinate
Operation Based on AHP-Fuzzy Synthetic Evaluation Method
ZHANG Yong-li,SUN Zhi-shui,ZHOU Rong-kun
(China Academy of Electronics and Information Technology,Beijing 100041,China)
Abstract:Coordinate operation of manned/unmanned aerial vehicle formation is an important mode of future aerial combat,and is an important manner to strive for the victory of aerial combat in the future.This paper performs the efficiency evaluation of manned/unmanned aerial vehicle formation coordinate operation,analyzes the major factors influencing manned/unmanned aerial vehicle formation coordinate operation,establishes the efficiency evaluation index system and model of manned/unmanned aerial vehicle formation coordinate operation,uses analytical hierarchy process (AHP) to determine the index weight of system performance,and adopts AHP-fuzzy synthetic evaluation method to evaluate the performance indexes.The result indicates that the method can make a scientific and reasonable evaluation for the efficiency of manned/unmanned aerial vehicle formation coordinate operation,which provides new perspective for the coordinate operation of efficiency evaluation of manned/unmanned aerial vehicle formation.
Key words:manned vehicle;unmanned aerial vehicle;analytical hierarchy process;fuzzy synthetic evaluation;efficiency evaluation
收稿日期:2015-05-21
DOI:10.16426/j.cnki.jcdzdk.2015.06.019
中图分类号:V279
文献标识码:A
文章编号:CN32-1413(2015)06-0080-05