基于参考图像的行星遥感图像自动几何精纠正
2015-03-09孙义威刘斌邸凯昌刘召芹
孙义威, 刘斌, 邸凯昌, 刘召芹
(中国科学院遥感与数字地球研究所遥感科学国家重点实验室,北京 100101)
基于参考图像的行星遥感图像自动几何精纠正
孙义威, 刘斌, 邸凯昌, 刘召芹
(中国科学院遥感与数字地球研究所遥感科学国家重点实验室,北京 100101)
针对行星多探测任务获取的海量遥感数据,提出一种基于现有参考图像匹配策略优化的自动几何精纠正技术方案。考虑到某些新传感器图像与已有参考图像的分辨率相差较大,提出了利用中间分辨率图像作为过渡的间接匹配策略;另外,针对月球和火星典型探测任务的遥感图像给出了相应参考图像的选取方法。选取嫦娥一号(CE-1)、嫦娥二号(CE-2)CCD图像和火星高解析度科学实验成像照相机(HiRISE)图像进行实验。针对CE-1和CE-2图像数据,选取月球侦察轨道飞行器宽角相机(LROC)图像作为参考;而针对HiRISE图像数据,选择以背景相机(CTX)图像为过渡、火星热辐射成像系统(THEMIS)图像为参考。利用自动匹配获取一定量的控制点,实现了行星遥感图像的自动几何精纠正。通过人工选取的检查点对纠正后图像进行精度评价的结果表明,所提出的自动几何精纠正方案是有效的,利用自动选取的控制点进行纠正后的图像定位精度明显提高,对月球和火星遥感图像的几何处理有实用价值。
行星遥感图像;几何精纠正;自动匹配;间接匹配
0 引言
高分辨率行星遥感图像的几何精纠正对行星表面形貌特征和地质构造研究以及支持后续的着陆巡视探测具有重要的科学工程意义。随着月球和火星探测任务的深入开展,各国获取和发布了大量的月球及火星遥感图像。迄今为止,除早期的一些探测任务的图像已经过了几何处理并生成了较低分辨率的图像产品外,大量新探测任务所提供的高分辨率行星遥感图像都未经几何处理,不同探测任务甚至同一探测任务图像间的几何不一致性普遍存在,在一定程度上制约了这些图像数据的科学应用。针对这一问题,本文对行星遥感图像几何精校正方法进行研究,提出一种基于现有参考图像匹配策略优化的、自动的行星图像几何精纠正技术方案。
图像的几何精纠正主要包括建立图像精化几何模型和图像重采样2个部分[1]。目前,对行星遥感图像成像模型的研究主要依据摄影测量学原理和传感器光学系统的特点来开展,Di等[2]利用卫星的星历等数据分别建立并利用了嫦娥一号(CE-1)和嫦娥二号(CE-2)的严格成像几何模型进行立体测图,得到高精度的地形产品;Liu等[3]对CE-1的有理函数模型(rational function model,RFM)进行研究,得出RFM能有效拟合CE-1严格成像几何模型的结论;在火星探测中,Kirk等[4]和Li等[5]分别建立了火星高解析度科学实验成像照相机(high resolution imaging science experiment,HiRISE)图像的严格几何模型,并进行了光束法平差、DEM生成等几何处理。从总体上说,对行星遥感图像几何模型的研究已经比较成熟,行星图像的几何处理既可利用严格成像几何模型,也可利用RFM等通用成像几何模型。
在获取控制点进行模型精化方面,已有不少学者对对地观测遥感卫星图像的匹配和控制点自动获取方法进行了有益的探讨和改进。钟志勇等[6]在研究高分辨率全色图像与低分辨率多光谱图像融合的过程中,提出了利用二进制小波分解方法实现空间分辨率相差很大(30∶1)的图像之间的同名点匹配;季顺平等[7]提出了一种基于有理多项式模型的同名点匹配方法,有效地解决了高分辨率遥感卫星图像自动匹配中不同成像模式、多时相、大姿态角等情况导致匹配困难的问题;徐硕等[8]提出了基于控制点库的控制点自动选取方法,通过匹配控制点库图像和待纠正图像,实现同名点的匹配;张登荣等[9]在Harris算子提取特征点的基础上,采用由特征点和小波图像金字塔引导的从粗到精的匹配策略,最终获得匹配点对;林宗坚[10]则提出把多种分辨率遥感图像从低分辨率到高分辨率逐级相互匹配、并以低一级分辨率作为基础的方法,解决了最高分辨率和最低分辨率图像间对应特征很少而难以匹配的问题。
与对地观测遥感图像的控制点自动获取相比,对行星遥感图像的控制点自动选取研究相对较少。由于行星遥感图像纹理贫乏、图像间分辨率相差较大等特性,行星图像控制点的获取基本上还是依靠人工选取,效率低且精度不高。因此,本文提出针对行星遥感图像的自动几何精纠正方案,在梳理目前月球、火星探测图像已有参考数据的基础上,针对在待纠正图像与参考图像分辨率相差较大情况下实现参考图像和待纠正图像自动匹配的问题进行探讨。本文提出的自动几何精纠正方法可以有效地提高行星图像数据几何处理的效率。
1 自动几何精纠正
1.1 纠正方案
针对行星遥感图像的特点,本文给出了自动几何精纠正的技术方案(图1)。

图1 行星遥感图像几何精纠正流程图Fig.1 Flow chart of accurate geo-rectification process for planetary remote sensing image
针对不同星载传感器的待纠正图像,综合考虑分辨率、覆盖范围以及光照条件等因素,从现有的参考图像库中选取合适的图像作为参考图像;通过两者之间的自动匹配,实现控制点的自动获取;利用这些控制点拟合出相应的几何精纠正模型或进行成像几何模型精化;利用精化几何模型对行星遥感图像进行几何精纠正或正射纠正处理。
1.2 行星遥感图像
CE-1卫星是我国第一颗月球探测卫星,获取了分辨率为120 m的全月图像;而CE-2卫星实现了在100 km×100 km圆形环月轨道上获取分辨率优于10 m的全月图像[11]。美国宇航局获取的HiRISE图像是目前火星探测任务中解析度最高(<0.3 m)相机拍摄的图像,广泛用于火星科学研究并支持火星车探测任务的实施。
为了验证本文方法的适用性,本文实验选取的这3类数据的分辨率从100 m量级到10 m级、m级及dm级,既有月球图像也有火星图像,图像载荷既有国产卫星也有国外卫星。本文使用上述3种行星图像作为实验数据,研究行星高分辨率图像的自动几何精纠正。
在控制点获取中,参考图像的选择是关键。对于行星遥感图像,参考图像是经过高精度几何处理后的产品,且与待纠正图像的特性相当,能够进行图像匹配获得同名点。根据CE-1和CE-2图像的特点,本文选择月球侦察轨道飞行器(lunar reconnaissance orbiter,LRO)宽角相机(LRO camera,LROC)图像作为参考。LROC拍摄的全月球图像的分辨率为100 m,水平方向绝对精度为50~300 m,已实现全月覆盖[12]。LROC图像的分辨率与CE-1卫星图像相差不大,与CE-2图像(分辨率约为7 m)相差较大,但考虑到两者在月面纹理表达上基本一致,因而能够进行图像间的自动匹配。
目前火星上的全球正射影像产品由热辐射成像系统(thermal emission imaging system,THEMIS)数据生成,分辨率为18 m;而HiRISE图像的分辨率为0.25 m,两者分辨率存在很大的差异,无法通过图像之间的直接匹配得到控制点。因此,本文选用火星侦察轨道飞行器(Mars reconnaissance orbiter,MRO)任务中的背景相机(context camera,CTX)获取的图像(分辨率为6 m)作为过渡,先将THEMIS图像中控制点的地理信息逐级传递给HiRISE图像,再利用间接匹配的方法获得图像的控制点。
1.3 控制点自动获取
改进的尺度不变特征变换(advanced scale-invariant feature transform,ASIFT)[13]算法是图像匹配中的经典算法,它不仅继承了尺度不变特征变换(SIFT)算法的尺度和旋转不变性,解决了大角度视角变化的图像匹配问题,同时又具有速度快、匹配精度高等优点。ASIFT算法首先对图像进行一系列仿射变换,然后在变换图像中搜索和匹配SIFT特征点;因此,它进一步完善了SIFT算法,能够在几何变形大的条件下检测出更丰富、更准确的特征点。
针对行星遥感图像纹理贫乏、图像间分辨率差异大等特性,本文选用ASIFT算法实现图像的自动匹配。首先分别在参考图像和待纠正图像中提取相应的SIFT特征点,然后进一步利用ASIFT匹配算法得到匹配的像素点。考虑到光照条件的影响,CE-1,CE-2和LROC图像在细节的表达上存在一定差异,尤其是行星表面的撞击坑,甚至会表现出完全不同的形态;因此,在进行自动匹配之前,本文分别对CE-1与LROC和CE-2与LROC图像进行直方图均衡化处理,使其在灰度上呈现基本一致的特点。火星HiRISE图像和现有的全球THEMIS图像之间的分辨率相差甚大(1∶72),无法通过图像之间的直接匹配得到控制点信息,故本文将CTX图像作为过渡图像,以实现HiRISE图像和THEMIS图像的自动匹配。
由于光照差异、分辨率差异及影像噪声等原因,图像自动匹配过程中常会出现误匹配现象,本文采用基于仿射变换模型的随机抽样一致性(random sample consensus,RANSAC)[14]算法来剔除粗差。其过程如下: 首先针对具体问题设计一个目标函数(本文中目标函数选取仿射变换函数);然后反复迭代抽取尽可能少但又足够多的数据点集来估算仿射变换参数的初始值,并利用这些初始值把数据划分为所谓的“内点”(Inliers,满足参数估计的点)和“外点”(Outliers,不满足估计参数的点,即粗差);最后反过来用所有的内点重新估算目标函数的参数值。与传统优化算法不同的是,RANSAC算法最开始是利用一小部分数据作为内点得到参数初始值,然后根据初始值寻找数据集合中其他的内点,这样可以最大限度地减少噪声和外点的影响。该算法具有很强的抗粗差能力,可自动完成粗差剔除、提高自动匹配的精度。
1.4 几何精纠正
在完成遥感图像与现有图像产品的同名点自动匹配之后,就可以从现有图像产品中获取匹配点的地理信息,这些带有地理坐标的匹配点将作为遥感图像的控制点参与到几何精纠正的解算当中。几何精纠正算法主要是基于严格成像模型和通用成像模型来实现的。由于通用成像模型具有数学模型形式简单、计算速度快等优点,目前大多采用基于RFM的方式来实现几何精纠正;在得到图像的控制点之后,就可以对原有的RFM进行精化处理[15-16]。本文采用在像方添加仿射变换参数的方式进行模型精化,即
(1)
式中: (x,y)为控制点在图像中的量测坐标;a0,b0为偏移参数;a1,b1为行方向上的系数;a2,b2为列方向上的系数;line,sample分别为控制点物方坐标反投在图像上的图像行、列坐标。
对于没有RFM的情况,也可以使用足量的控制点建立多项式模型,进而完成几何精纠正。
2 实验及结果分析
月球虹湾区将是我国CE-3卫星在月球执行着陆巡视探测任务的着陆区,对该区域图像进行几何精纠正处理、建立统一的空间参考系统,具有很重要的科学和工程意义;同样,作为勇气号火星车着陆点的古谢夫(Gusev)撞击坑也是火星研究的热点区域。因此,本文分别选取虹湾区的CE-1和CE-2卫星CCD图像以及火星Gusev 撞击坑区域的HiRISE图像作为实验数据(表 1),选取覆盖相同地区的LROC 和THEMIS 图像作为参考图像(表 2),完成虹湾区及Gusev撞击坑区域的HiRISE图像与现有图像产品的匹配;并利用自动匹配的控制点对图像进行几何精纠正;然后人工选取一定数量的检查点,对几何精纠正产品进行精度评价。

表1 实验数据Tab.1 Experimental data

表2 参考图像Tab.2 Reference image
2.1 匹配结果
由于CE图像和LROC图像的对比度之间存在比较大的差异,因此在匹配前分别对2景图像进行了直方图均衡化处理。两者的匹配结果如图 2所示。

图2 CE-1星(左)和CE-2星(右)CCD与LROC图像匹配结果(图中白色直线的2个端点为自动匹配点)Fig.2 Matching results of CE-1(left) and CE-2(right) and LROC images
从图2可以看出,利用ASIFT匹配得到的匹配点多分布于平坦区域;对于起伏较大的坑沿地区,基本匹配不到同名点,这是由于分辨率的差异使得地形起伏较大区域的地形细节表达不一致造成的。
Gusev撞击坑实验区域的间接匹配结果如图3所示。

图3 HiRISE与THMIS图像间接匹配(图中白色直线的2个端点为自动匹配点)Fig.3 Indirect matching of HiRISE and THEMIS images
从图3可以看出,用CTX图像作为过渡之后,有效地完成了HiRISE与THEMIS图像的自动匹配。
2.2 精度验证
本文利用通用成像模型,实现了对CE星图像中虹湾区域的几何精纠正处理;并通过人工选取的方式,在实验区域分别选取了一定数量的检查点,用以评价图像的纠正精度(表3),从而间接地评价同名点自动匹配的精度。

表3 几何精纠正精度Tab.3 Accuracy of accurate geo-rectification
由表3可以看出,在利用本文方法进行几何精纠正后,CE-1图像的定位精度由无控制点定位的1 115.7 m提高到651.2 m;CE-2图像的定位精度也由4 742.3 m提高到262.1 m;HiRISE图像的直接定位精度由无控制点定位的3 947.2 m提高到23.9 m,精度明显提高。
利用误差图(图4)对几何精纠正误差进行分析,图中绿色箭头表示无控制点下的误差大小及方向,蓝色箭头为有控制点下的误差大小及方向(为了显示清晰,误差采用了不同倍率的放大处理,图例中的数字表示相应的放大倍率)。在无控制点直接定位时,可以看出明显的系统误差;而利用少量控制点进行模型精化后,系统误差已被消除。尽管利用控制点纠正后的残差仍在100 m级和10 m级,但根据参考图像的分辨率,CE-1星图像的误差对应于参考图像中的6.5个像素,CE-2星图像的误差对应于2.6个像素,HiRISE图像的误差对应于1.3个像素。尽管还存在参考数据精度、人工选点误差及纠正过程中并未使用DEM进行高差引起的投影差改正等因素,本文方法的几何精纠正结果仍在误差允许范围内。
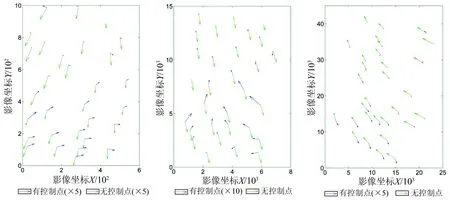
(a) CE-1残差 (b) CE-2残差 (c) HiRISE残差
图4 误差分布图
(图例中的数字表示相应的放大倍率)
Fig.4 Maps of adjustment residuals
3 结论
1)在分析不同探测任务的行星遥感图像特点基础上,选取了相应传感器图像几何精纠正所需的参考图像;通过图像预处理等技术手段,实现了行星遥感图像同名点的自动匹配,建立了行星遥感图像自动几何精纠正的技术流程。
2)针对行星遥感图像与参考图像间分辨率差异大而无法自动匹配的问题,提出利用中间分辨率图像作为过渡的间接匹配策略,并通过实验证明了该策略的有效性。
3)因受行星遥感图像特征差异等因素影响,自动匹配的控制点在图像中的分布还不够均匀;在图像纠正中还未使用DEM进行高差引起的投影差改正,这些问题需要在今后进行更深入的研究。
[1] 梁志华.MODIS影像的几何处理算法研究[J].国土资源遥感,2012,24(1):8-12. Liang Z H.A study of algorithm of geometric processing for MODIS image[J].Remote Sensing for Land and Resources,2012,24(1):8-12.
[2] Di K C,Liu Y L,Liu B,et al.Rigorous photogrammetric processing of Chang’E-1 and Chang’E-2 stereo imagery for lunar topographic mapping[C]//International Archives of the Photogrammetry,Remote Sensing and Spatial Information Sciences.Melbourne,2012,39(B4):307-312.
[3] Liu Y L,Di K C.Evaluation of rational function model for geometric modeling of Chang’E-1 CCD images[C]//International Achieves of the Photogrammetry,Remote Sensing and Spatial Information Sciences.Guilin:ISPRS,2011.
[4] Kirk R L,Howington-Kraus E,Rosiek M R,et al.Ultrahigh resolution topographic mapping of Mars with MRO HiRISE stereo images:Meter-scale slopes of candidate Phoenix landing sites[J].Journal of Geophysical Research,2008,113(E3):E00A24.
[5] Li R X,Hwangbo J,Chen Y H,et al.Rigorous photogrammetric processing of HiRISE stereo imagery for mars topographic mapping[J].IEEE Transactions on Geoscience and Remote Sensing,2011,49(7):2558-2572.
[6] 钟志勇,陈鹰,黎运高.分辨率相差较大的卫星影像融合方法研究[C]//中国图象图形学会第十届全国图像图形学术会议(CIG’2001)和第一届全国虚拟现实技术研讨会(CVR’2001)论文集.北京:工程图学学报,2001(sl):138-142. Zhong Z Y,Chen Y,Li Y G.A study on fuse method for images with large resolution gap[C].//China Society of Image and Graphics.Beijing:Journal of Engineering Graphics,2001(sl):138-142.
[7] 季顺平,袁修孝.基于RFM的高分辨率卫星遥感影像自动匹配研究[J].测绘学报,2010,39(6):592-598. Ji S P,Yuan X X.Automatic matching of high resolution satellite images based on RFM[J].Acta Geodaetica et Cartographica Sinica,2010,39(6):592-598.
[8] 徐硕,江万寿,牛春盈.基于控制点影像库的控制点自动选取初探[J].遥感信息,2008(2):35-38. Xu S,Jiang W S,Niu C Y.A preliminary study on automatic selection of GCP based on image database[J].Remote Sensing Information,2008(2):35-38.
[9] 张登荣,蔡志刚,俞乐.基于匹配的遥感影像自动纠正方法研究[J].浙江大学学报:工学版,2007,41(3):402-406. Zhang D R,Cai Z G,Yu L.Study on image automation registration methods based on matching[J].Journal of Zhejiang University:Engineering Science,2007,41(3):402-406.
[10]林宗坚.遥感影像无(稀少)地面控制点纠正技术[J].地理与地理信息科学,2003,19(4):64-65. Lin Z J.Remote sensing image rectification with sparse ground control points[J].Geography and Geo-Information Science,2003,19(4):64-65.
[11]欧阳自远.嫦娥一号卫星的初步科学成果与嫦娥二号卫星的使命[J].航天器工程,2010,19(5):1-6. Ouyang Z Y.Science results of Chang’e-1 lunar orbiter and mission goals of Chang’e-2[J].Spacecraft Engineering,2010,19(5):1-6.
[12]LRO WAC Mosaic Data_Quality_Information.URL[EB/OL](2011-5-24)[2014-1-16].ftp://pdsimage2.wr.usgs.gov/pub/pigpen/moon/LROC/wac_mosaic_asu/LRO_WAC_Mosaic_Global_303ppd.html.
[13]Morel J M,Yu G S.ASIFT:A new framework for fully affine invariant image comparison[J].SIAM Journal on Imaging Sciences,2009,2(2):438-469.
[14]Fischler M A,Bolles R C.Random sample consensus:A paradigm for model fitting with applications to image analysis and automated cartography[J].Communications of the ACM,1981,24(6):381-395.
[15]刘江,岳庆兴,邱振戈.RPC校正方法研究[J]国土资源遥感,2013,25(1):61-65. Liu J,Yue Q X,Qiu Z G.Research on the approach to RPC emendation[J].Remote Sensing for Land and Resources,2013,25(1):61-65.
[16]刘斌,孙喜亮,邸凯昌,等.资源三号卫星传感器校正产品定位精度验证与分析[J].国土资源遥感,2012,24(4):36-40. Liu B,Sun X L,Di K C,et al.Accuracy analysis and validation of ZY-3’s sensor corrected products[J].Remote Sensing for Land and Resources,2012,24(4):36-40.
[17]Archinal B A,Weller L,Sides S,et al.Preparing for THEMIS controlled global Mars mosaics[C]//Lunar and Planetary Institute Science Conference Abstracts.2004,35:1903-1094.
(责任编辑: 刘心季)
Automatic accurate geo-rectification of planetary remote sensing image based on reference image
SUN Yiwei, LIU Bin, DI Kaichang, LIU Zhaoqin
(StateKeyLaboratoryofRemoteSensingScience,InstituteofRemoteSensingandDigitalEarth,ChineseAcademyofSciences,Beijing100101,China)
Aimed at efficient processing of the massive image data obtained by multi-sensors in planetary exploration missions,the authors proposed a solution to automatic accurate geo-rectification of the remote sensing images by matching them to the available reference images,which are already mapped into certain coordinate frame. Considering the large resolution gap between some of the images, this paper recommended an indirect matching strategy. The authors also tackled the problem concerning the choice of the appropriate reference image according to the characteristics of the typical lunar and Mars images. Using CCD images of CE-1 and CE-2 images from Chang’E missions and HiRISE images from MRO mission,with reference images from LROC WAC and THEMIS VIS respectively,the authors conducted the experiments. The accuracy of the corrected image were evaluated with manually selected checkpoints. The results show that, by matching them with referenced images, the control points can be chosen automatically and the subsequent rectification can achieve a significant accuracy improvement compared with that without any control points. The proposed solution is effective and practical for automatic geometric processing of planetary remote sensing images.
planetary remote sensing image;accurate geo-rectification;automatic matching;indirect matching
2013-12-06;
2014-02-12
国家基础研究计划(973计划)项目“运动平台自主定位定姿”(编号: 2012CB719902)和“大型隐蔽性滑坡致灾因子识别方法研究”(编号: 2013CB733202)、国家自然科学基金项目“登月宇航员月面导航定位方法研究”(编号: 41171355)和“基于遥感影像和多源基准数据联合的月球火星轨道器定轨定姿研究”(编号: 41301528)共同资助。
10.6046/gtzyyg.2015.01.04
孙义威,刘斌,邸凯昌,等.基于参考图像的行星遥感图像自动几何精纠正[J].国土资源遥感,2015,27(1):23-28.(Sun Y W,Liu B,Di K C,et al.Automatic accurate geo-rectification of planetary remote sensing image based on reference image[J].Remote Sensing for Land and Resources,2015,27(1):23-28.)
TP 751.1; P 236
A
1001-070X(2015)01-0023-06
孙义威(1989-),男,硕士研究生,主要从事卫星图像高精度几何处理等研究。Email: sunyw@irsa.ac.cn。
邸凯昌(1967-),男,研究员,博士生导师,主要从事行星遥感制图与导航定位、高分辨率卫星图像几何处理等研究。Email: kcdi@irsa.ac.cn。
