无人机安全性指标要求确定方法研究*
2015-03-09尹树悦,王少飞,陈超
无人机安全性指标要求确定方法研究*
尹树悦1,王少飞2,陈超1
(1. 空军装备研究院,北京100076; 2. 空军装备部,北京100038)
摘要:针对无人机安全性需求和指标论证问题,分析了无人机等效安全水平原则的由来和基本内涵,研究了无人机安全性指标的导出途径,进一步通过分析无人机对地撞击和空中相撞安全性水平要求及相关计算模型,对无人机安全性指标要求的确定方法进行了系统的研究。
关键词:无人机;安全性指标;要求
0引言
无人机安全性指标是指与无人机型号设计有关的安全性定量要求,一般以由设计原因导致的每飞行小时发生灾难性事故的概率来表示。确定科学合理的安全性指标要求是对无人机型号研制安全性工作的重要牵引。
无人机的安全性问题与有人机相比存在着诸多的差异[1]。其中在确定无人机安全性指标要求时,英、美等国家并不是像确定有人机的安全性指标要求那样针对飞机本身事故损失率的可接受程度提出安全性指标,而是提出了“等效安全水平(equivalent level of safety, ELOS)”的原则,并基于此原则来导出无人机的安全性指标要求[2-3]。
1等效安全水平原则
等效安全水平是美、英等国针对无人机安全性提出的概念,即无人机安全性的目标追求是应不低于有人机的安全性水平,或与有人机的安全性水平相当,以实现未来无人机能够进入更为广阔的有人机空域运行,而不会增大空域内其他飞机或地面人员及财产的安全风险。由此可见,无人机安全性指标要求是基于公众对其发生事故对地面人员和他机及机上人员造成的损失的可接受程度提出的,而这种可接受程度便是等效安全水平要求。对于有人驾驶航空活动来说,对人的生命(包括本机上的人员)带来危险的形式有2种,一种是不连续的飞行导致撞地,另一种是空中相撞,同样,无人机事故对人的生命带来危险的形式也是以上2种。
2无人机安全性指标的导出途径
目前,对等效安全水平的概念有2种不同的理解。一种是直接以灾难性事故率作为等效安全水平的衡量参数;另一种是考虑到不同类别的无人机发生事故造成损失的严重程度不同,以“目标安全水平”来导出可用于设计的无人机安全性指标要求。
当前,美、英等国对军用飞机安全性水平的要求一般为由飞机原因导致的灾难性事故的概率不大于1E-6/飞行小时,而所有导致灾难性事故的概率为不大于1E-5/飞行小时。因此,如基于上述第1种等效安全水平原则的概念理解,无人机系统的安全性指标被表述为:①出于无人机系统设计考虑,在和平时期使用中由于设计原因和失效问题造成灾难性事故的概率应不高于1E-6/飞行小时;②当同时考虑设计和使用,可表述为无人机在和平时期使用中导致灾难性事故的概率应不高于1E-5/飞行小时。以上方法确定的安全性指标没有区分不同的无人机类型,是对所有类型无人机统一的指标要求[4]。
直接根据有人机的事故率指标导出的无人机安全性指标要求是根据第1种等效安全水平概念理解给出的,没有考虑无人机安全性问题特殊性,即不同类型的无人机在尺寸、重量等特征上范围跨度相当大,不同类型的无人机发生事故后造成的结果可能会是从小的损伤到很多死亡[5-6],这样再以事故率来对所有类型无人机定义等效安全水平显然是不合适的。
美国麻省理工学院空中交通国际研究中心的Roland E. Weibel和R. John Hansman提出了在等效安全水平原则下,以“目标安全水平TLS”(或称“期望安全水平ELS”)来导出可用于设计的无人机安全性指标要求的方法,这便是根据第2种等效安全水平原则的概念(以后如无特别说明,等效安全水平原则均指上文定义的第2种概念),基于无人机不同的事故后果形式提出的方法[7-8]。根据无人机的特点和等效安全水平原则,Weibel主要从对地撞击安全水平要求和空中相撞安全水平要求出发来导出用于设计的无人机安全性指标要求。图1简要表示无人机安全性指标要求的导出途径。下文将对图1中的“无人机事故率总体指标要求”、“与设计相关的无人机安全性总体指标要求”和“‘感知-规避’设计安全性指标要求”的确定方法进行详细介绍。
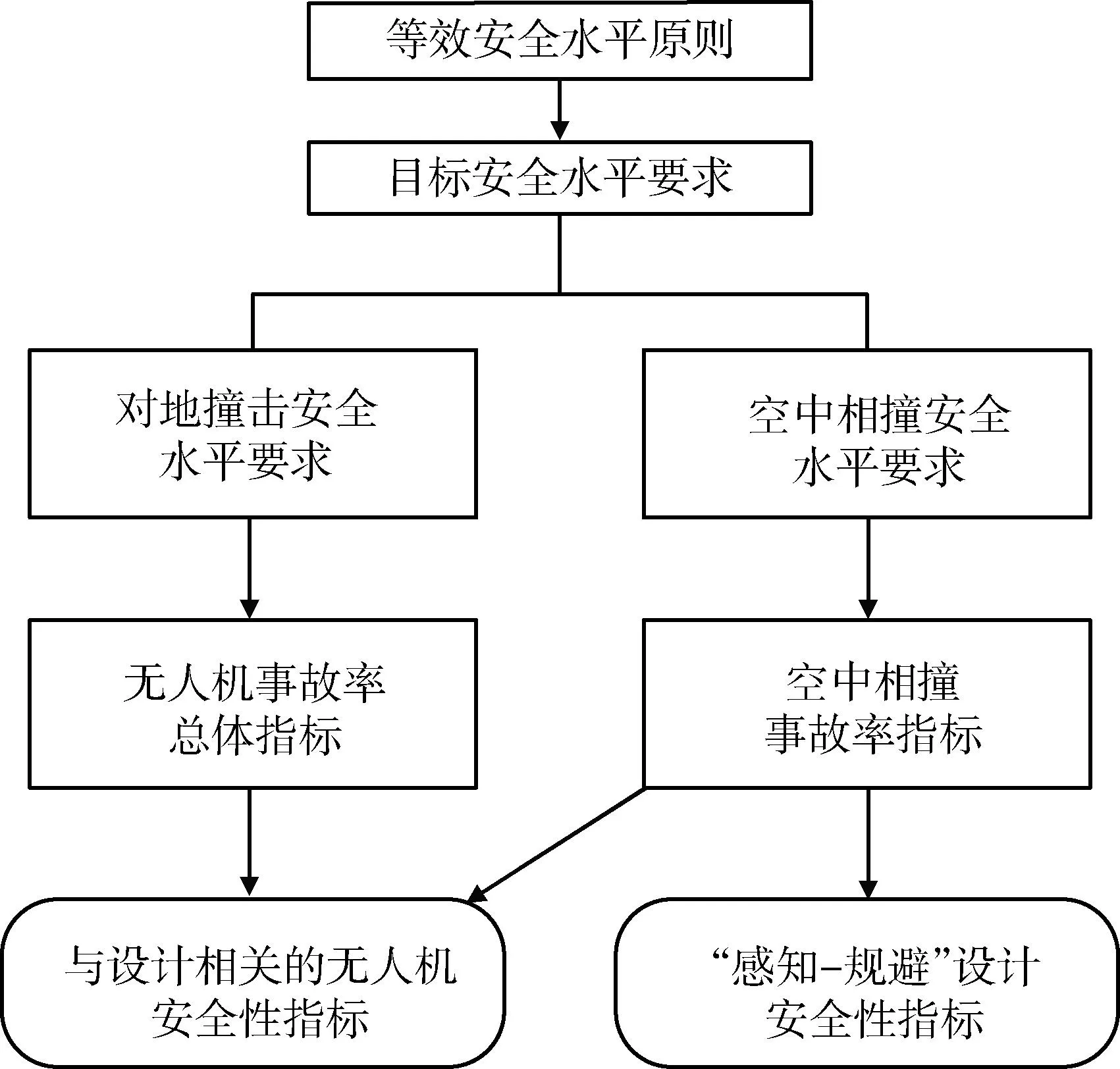
图1 无人机安全性指标的导出Fig.1 Deriving UAV safety index
3对地撞击安全性水平要求及指标的确定
Weibel在根据等效安全水平原则分析无人机发生事故后对地撞击的安全水平要求时,是以死亡率来表示对地撞击的目标安全水平,从而可以对不同类型无人机造成的损失加以区分。尽管目前有人航空规范未对死亡率做出要求,但通过历史事故数据的统计分析可以提供死亡率的信息,用以根据等效安全水平原则确定无人机对地撞击的目标安全水平。
Weibel等人利用事件树分析了无人机发生事故撞击地面后对地面人员的伤害问题,本文在其基础上对事件树分析进行了改进,如图2所示。
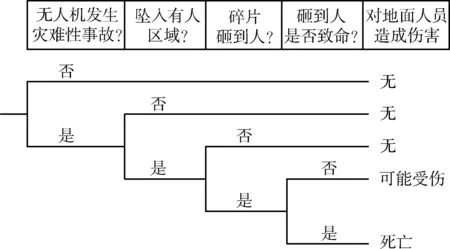
图2 无人机发生事故撞地事件树Fig.2 Event tree for UAV ground impact accident
基于以上的事件树分析,Weibel等人提出无人机对地面撞击的目标安全水平模型如下[8]:
减压病是由于高压环境作业后减压不当,体内原已溶解的气体(主要是氮气)超过了过饱和界限,在血管内外及组织中形成气泡所致的全身性疾病[1]。减压病的发病机理中,气泡形成是原发因素;但因液气界面作用,尚可继发引起一系列病理生理反应[2-4]。本例减压病的发病原因主要考虑如下:潜水环境较差,潜水当日水温较低,10 ℃以下;水下停留时间较长且反复3次潜水;最主要考虑可能还是每次减压不正规(具体减压时间不详)。

(1)
式中:TLS为以地面人员死亡率表示的目标安全水平;MTBF为平均故障间隔时间;Aexp为暴露面积;ρ为撞击地区的人口密度(ρ=人口数量/面积);Ppen为穿透能力(%):0~100%(数值越大,穿透力越大),穿透能力Ppen与无人机的结构和能量,以及地面上物体承受撞击的能力有关,式(1)中的Ppen是基于无人机巡航状态下的动能估算的。Pmit为缓解率(%):0~100%(数值越大,缓解率越大),当无人机发生事故时,机载缓冲装置能减少无人机对地面的冲击能量,如降落伞等,它们所能产生的缓冲效果也不同。
在不考虑缓冲效果的情况下,式(1)可简化为

(2)

TLS=MR·AexpρPpen,
(3)
式中:MR为事故率,即无人机飞行中发生事故坠地的概率。
根据美国国家运输安全委员会(NTSB)1983~2006年的数据统计(见表1)[2],有人航空事故中地面死亡仅占总死亡数非常少的一部分。应指出的是,确切数字可能会因航空器类型(通用、通勤、大型飞机)及所处的时段而不同。这从美国海军关于飞机失事导致地面伤亡的调查分析中也可以看出。基于每一千万飞行小时,美国海军、商用及通用航空事故对地面造成的死亡数分别为18,7和4.7个,该调查包括了美国海军1980至1998年、民航1982至1998年的数据。

表1 1983~2006年每飞行小时事故数据分析
由表1中数据可知,有人航空事故对地面人员造成伤亡的概率为6.54×10-7/飞行小时。根据上述事故统计数据及等效安全水平原则要求,无人机事故对地面人员造成的伤亡率要求可定为不大于1E-7/飞行小时,即无人机对地面撞击目标安全水平要求为伤亡率不高于1E-7/飞行小时(TLS=1×10-7/飞行小时)。根据前文给出的数据,美国海军无人机事故致地面死亡率的量级为1E-6/飞行小时,考虑到对于用作军事用途的无人机可以允许较高的死亡率,因而北约无人机系统适航要求将无人机对地面造成的死亡率定为1E-6/飞行小时。
针对某一型无人机,在已知Aexp,ρ和Ppen的前提下,将TLS的值代入式(3),可以求得无人机对地撞击事故率指标MR,实际上所有无人机飞行中发生事故最终都会撞向地面(包括空中相撞事故),也就是说此事故率指标MR即为无人机的事故率总体指标,包含了空中相撞事故率。
根据上述模型,以质量或尺寸区分的不同类型的无人机其Aexp和Ppen是不同的,而不同的地区人口密度ρ也有所不同。因此,对于同一类型的无人机,其所活动的空域不同对其安全性指标的要求也应不同;对于不同类型的无人机,即使在同一空域内活动,对其安全性指标的要求也是不同的。基于以上原理,Weibel等人采用1E-7/飞行小时的目标安全水平,计算出的不同类型无人机在美国领土不同区域的安全性指标要求分布。
澳大利亚的Reece Clothier和Rodney Walker在Weibel等人研究的基础上于2006年在第21届无人机系统国际会议上提出了改进的无人机事故地面致死率模型,此模型对Weibel的模型做了进一步简化,既不考虑缓冲问题也不考虑穿透能力,可表示如下[2]:
TLS=MR·ρAL,
(4)
式中:TLS,MR和ρ的含义同式(3);AL为是以无人机最大的维度尺寸加上单个人体的平均宽度作为直径所做的圆的面积,这个面积代表了无人机撞地后的可致人死亡的区域。
MR=SFR+MCDebris+Other.
(5)
上述模型将导致无人机撞地事故的类别进行了划分,其中SFR为由设计原因导致无人机不能连续飞行的每飞行小时事故率,MCDebris为空中相撞致坠地的每飞行小时事故率,Other为由其他原因(如天气、鸟撞以及人为差错等)导致的无人机撞地每飞行小时事故率。
在已知TLS,ρ和AL的前提下根据式(4)可以估算出指定类型无人机在指定空域内的事故率总体指标MR。在无人机研制中,需要根据具体型号的特点和以往事故统计数据中由设计原因和非设计原因造成事故的比例分布情况,按照式(5)对MR做进一步分解,以得到由无人机设计原因导致的对地撞击事故率指标即:SFR+MCDebris。再基于有人机事故统计数据,依据等效安全水平原则确定出无人机空中相撞事故率指标MCDebris(见下节),同时也就得到SFR。SFR与MCDebris便是与设计相关的两类无人机安全性指标。
4空中相撞安全性水平要求及指标的确定
由第3节可知,不论是Weibel的对地撞击目标安全水平模型还是Reece Clothier等人的模型,其总事故率参数MR都包括了空中相撞的一部分,之所以再单独提出空中相撞安全性水平要求,是为了牵引无人机防空中相撞安全性设计。为此需要根据等效安全水平原则,针对公众对空中相撞致人死亡或空中相撞后坠地致人死亡的容忍程度,提出其目标安全水平要求。
根据等效安全水平原则,如果类似于对地撞击事故,空中相撞的目标安全水平也采用死亡率来衡量,可分为两类情况,第1种情况为无人机与有人机空中相撞导致有人机机上人员死亡率或相撞后坠地导致地面人员死亡率,第2种情况为无人机与无人机相撞后坠地导致地面人员死亡率,那么这2种情况下会牵涉到与之相撞的有人机或无人机的不同类型问题,如被撞有人机的大小或载人的多少、被撞无人机的大小等,将会使问题变得更为复杂,因而无人机与有人机或无人机与无人机空中相撞的目标安全水平用空中相撞事故率来表示更为可取。基于表1的统计数据,根据等效安全水平原则,可以提出无人机空中相撞的目标安全水平值(空中相撞事故率)为TLSMC=1E-7/飞行小时,这里的TLSMC与式(5)中的MCDebris是一致的。
Weibel在研究空中相撞目标安全水平时,建立了无人机空中相撞风险模型[7]。在空中相撞风险模型中,无人机被视作“威胁飞机”,空域中的其他有人机或无人机为“受威胁飞机”。模型假定无人机在指定空域所处的位置具有等可能性,其速度也假定与“受威胁飞机”相比较低。当“受威胁飞机”飞经指定空域时,它们占据了潜在的碰撞容积。碰撞风险用期望的无人机每飞行小时碰撞率来描述,这个碰撞率是“受威胁飞机”每飞行小时占据空域的容积与所指定空域的整个容积的比值。如图3所示。
在所指定空域中,每一架“受威胁飞机”飞过一段距离di;每一架“受威胁飞机”具有一个暴露面积Aexp,代表碰撞易接触区域,以受威胁飞机为有人机为例,在具体计算时可用一个中型商用飞机(如波音757)的前向面积来估算,大约为560平方英尺。在假定无人机的面积与“受威胁飞机”相比足够小的前提下,暴露面积Aexp可以不考虑无人机类型的差异(如受威胁飞机为其他无人机,则还应考虑无人机的不同类型)。
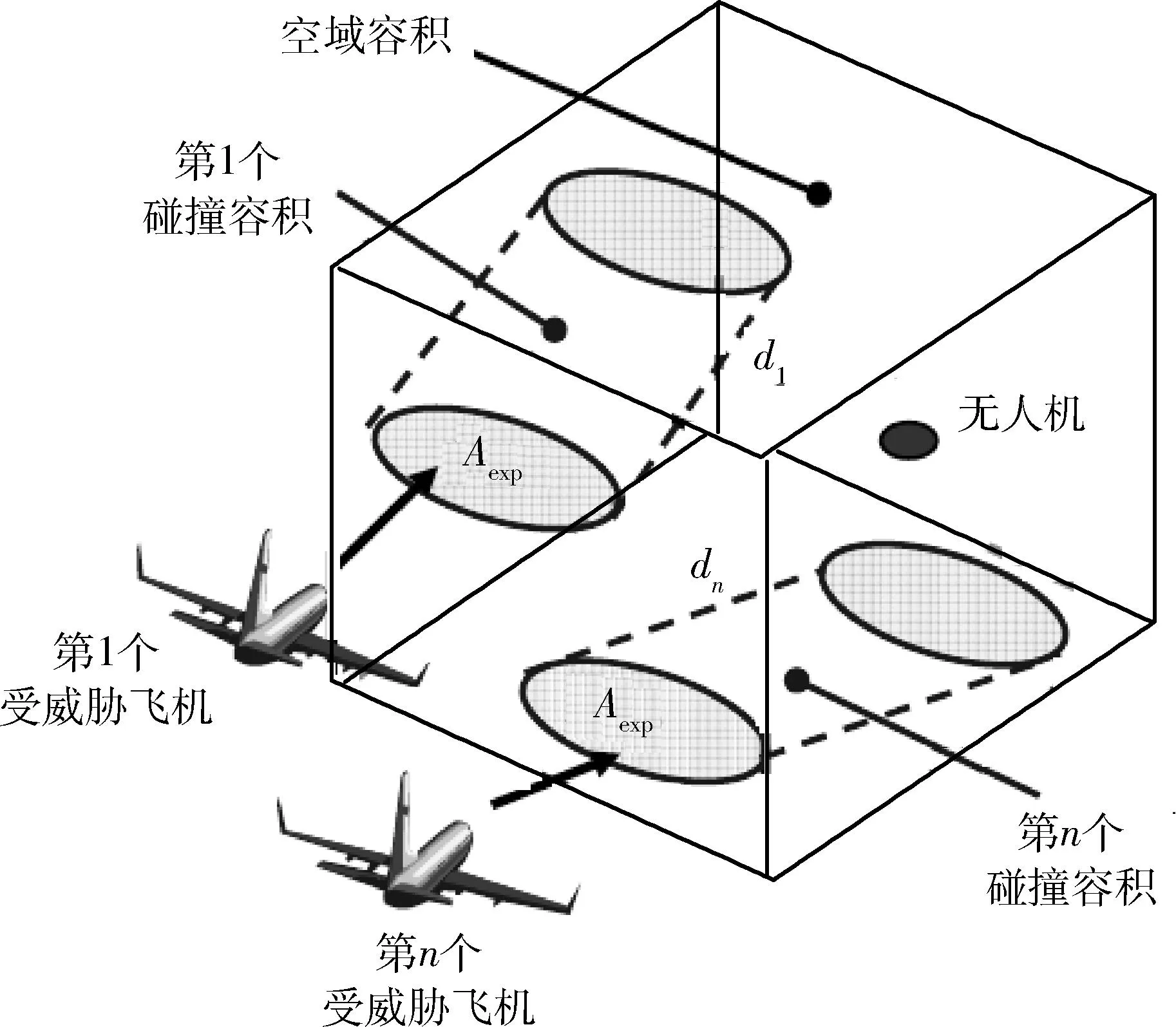
图3 无人机空中相撞风险模型Fig.3 Risk model of UAV midair collision
如图3所示,每一个碰撞容积的大小为可表示为暴露面积Aexp与飞行距离di的乘积。空域内所有“受威胁飞机”总的碰撞容积为各容积之和,即暴露面积乘以总飞行距离d。空域内总飞行距离所经历的时间为t。空域内期望的碰撞数为总碰撞容积与整个所指定空域容积V的比值,实际上这也代表了所指定空域中空中交通的密集程度。期望的碰撞率为期望的碰撞数除以时间t。因此,无人机每飞行小时空中碰撞率可表示为
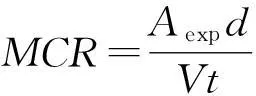
(6)
尽管可能会发生潜在的碰撞,但并不一定会导致致命性事故,因为可以通过“感知-规避”技术来避免空中相撞事故的发生,或减轻碰撞的危害量级[9]。基于此考虑,最终得到的无人机空中相撞目标安全水平可表示为

(7)
5结束语
安全性指标确定的合理与否是影响无人机长远发展的一个重要因素。依据等效安全性水平原则给出的无人机安全性指标确定方法充分考虑了无人机的不同类型和使用空域等条件,对于无人机型号研制中论证提出安全性指标要求是一种可行的方法。
参考文献:
[1]尹树悦,温志诚. 无人机的安全性问题[J]. 国际航空,2012(9):36-37.
YIN Shu-yue, WENG Zhi-cheng. Safety Problems of UAV [J]. International Aviation, 2012(9):36-37.
[2]李春锦,文泾. 无人机系统的运行管理[M]. 北京:北京航空航天大学出版社,2011.
LI Chun-jin, WENG Jing. Operational Management of Unmanned Aircraft System [M]. Beijing: Beihang University Press, 2011.
[3]Reece Clothier, Rodney Walker. Determination and Evaluation of UAV Safety Objectives [C]∥Proceedings 21st International Unmanned Air Vehicle Systems Conference, 2006:18.1-18.16.
[4]Andrew J Armstrong. Development of a Methodology for Deriving Safety Metrics for UAV Operational Safety Performance Measurement [D]. USA: The University of York, 2010.
[5]Dassault Aviation.UAV Safety Objectives and Weight Categories [R]. Dassault Aviation Pairs, France, 2003.
[6]CASAROSA C, GALATOLO R, MENGALI G. Impact of Safety Requirements on the Weight of Civil Unmanned Aerial Vehicles [J]. Aircraft Engineering and Aerospace Technology,2004,76(6):600-606.
[7]Roland E Weibel, John Hansman R. Safety Considerations for Operation of UAV in The National Airspace System [R].USA: MIT International Center for Air Transportation, 2005.
[8]Charles Benjamin Cline. Methods for Improvements in Airworthiness of Small UAS [D]. USA: North Carolina State University, 2008.
[9]European Defence Agency.Technology Demonstration Study on Sense & Avoid Technologies for Long Endurance Unmanned Aerial Vehicles [R]. European Defence Agency, December, 2007.
[10]蔡志浩,杨丽曼,王英勋,等. 无人机全空域飞行影响因素分析[J]. 北京航空航天大学学报,2011,37(2):175-179.
CAI Zhi-hao, YANG Li-man, WANG Ying-xun, et al. Analysis for Whole Airspace Flight Key Factors of Unmanned Aerial Vehicles [J]. Journal of Beihang University, 2011,37(2):175-179.
[11]王蕾. 军用无人机的能力和局限[J]. 飞航导弹,2005(1):20-29.
WANG Lei. Capacity and Limitation of Military UAV [J]. Aerodynamic Missile Journal, 2005(1):20-29.
[12]SIMPSON A J, STOKER J. Safety Challenges in Flying UAVS in Non-Segregated Airspace [C]∥London, UK: 1st Institution of Engineering and Technology International Conference on System Safety, 2006:81-88.
Research on Method for Determination of UAV Safety Index Requirements
YIN Shu-yue1, WANG Shao-fei2, CHEN Chao1
(1. Air Force Equipment Academy,Beijing 100076,China; 2. Air Force Equipment Ministry,Beijing 100038,China)
Abstract:Considering the problem of unmanned aerial vehicle (UAV) safety requirements and index determination, UAV equivalent level of safety (ELOS) principle and its meaning are analyzed. The approach to deriving UAV safety index is studied. In addition, the method of determining UAV safety index requirements isparticularly investigated through analyzing safety level requirements and models associated with UAV impact on ground and midair collision.
Key words:unmanned aerial vehicle(UAV); safety index; requirement
中图分类号:V279
文献标志码:A
文章编号:1009-086X(2015)-02-0154-05
doi:10.3969/j.issn.1009-086x.2015.02.025
通信地址:100076北京市9236信箱2分箱E-mail:zbysy_2001@sina.com
作者简介:尹树悦(1979-),男,河北张北人。工程师,博士,研究方向为航空器适航与安全性。
* 收稿日期:2014-07-06;
修回日期:2014-08-05
