多站高频地波雷达目标检测研究
2015-03-08文必洋石阳升王若琨
文必洋 石阳升 杨 静 王若琨
(武汉大学电子信息学院,湖北 武汉430072)
引 言
高频地波雷达具有海洋环境监测和低速目标检测与跟踪等方面的能力,得到世界沿海经济与技术强国的高度重视.高频地波雷达在海洋环境监测方面的技术[1-2],目前已经发展得相当成熟,已成为临海国家监测专属经济区最有力的监测手段之一.相对于海洋环境监测,其在目标探测方面的应用则显得十分滞后,相关技术仍处于发展和完善的过程当中[3-4].产生这一现象的原因是,海洋回波强度非常稳定,而低速运动目标回波强度变化很大,从而导致总体的检测概率不尽如人意.
高频雷达工作波长为数十米,与水面舰船的尺度为同一量级.这导致目标散射截面处于高频波段的谐振区[5],目标的散射截面随雷达工作频率的变化很大.为此,黄晓静等人进行了多站高频地波雷达探测目标的研究[6],取得了较好的成效.另外,除雷达工作频率、船只吨位和桅杆高度外[7-8],理论分析还表明,不同的雷达视角也会影响目标的雷达散射截面[9].本文从另一个方面——多站组网来研究高频地波雷达的目标探测性能.
1 理论分析
1.1 恒虚警处理
进行目标检测时,常用恒虚警处理的方法[10].根据Divito和Moretti的计算,均匀杂波背景下,使用线性检波的单元平均恒虚警(Cell Averaging-CFAR,CA-CFAR),其虚警概率近似表达式为[11]

式中:Pfa是恒定的虚警率;c=4/π;m是滑窗长度;T是标称化因子.
考虑到实际的数据处理过程中,检测门限是比虚警率更加直观的表达方式,且线性检波时检测门限γ和标称化因子存在以下关系:

通过固定检测门限和滑窗长度,由公式(1)、(2)得到相应的虚警率,表1是m=24时不同门限与虚警率的对应关系.三级检测后[12],总的虚警率为该虚警率的平方.
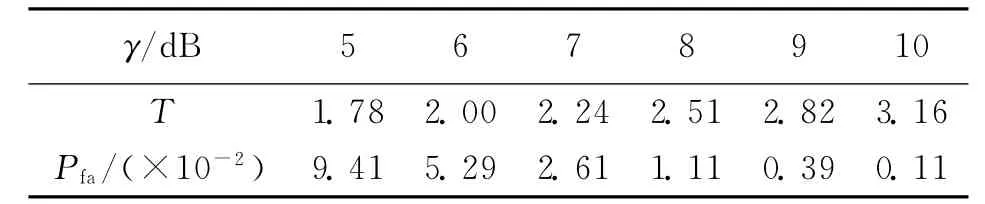
表1 不同检测门限和虚警率的对应关系(m=24)
1.2 雷达组网检测
当应用多部空间上相互分离的雷达照射同一区域时,就构成了雷达网络,网络中的各雷达可视为相互统计独立.进行目标探测时,需要将多部雷达的数据进行融合,一种简单的规则是:只要有一部雷达检测到目标,检测中心就可以作出目标存在的判决[13].
设网内共有L部雷达,其中第l部雷达的检测概率为Pdl,总的检测概率为Pd,于是有

而由文献[14],均匀杂波背景下,使用线性检波的CA-CFAR检测器,其检测概率为
式中:n为任意大正整数;

SNR(Signal-Noise Ratio)为幅度表示的信噪比.
由于外界条件的差异,同一目标在网内不同雷达处显示的信噪比往往是不一样的,这会导致不同雷达对同一目标的检测概率存在相应的差异.图1给出了在两部雷达组网的条件下,应用上述判决规则时联合检测概率随单站检测概率的变化趋势.

图1 联合检测概率随单站检测概率的变化曲面
2 实测数据处理
理论分析可知,多站可以有效提高目标的检测概率.2013年底在渤海海域进行了组网试验,在蓬莱站和北隍站各安装了一套线性调频中断连续波体制的便携式高频地波雷达,发射天线是简单的垂直极化的单极子天线,接收天线是单极子/交叉环天线[15],其法向分别为50°和125°,两套雷达通过GPS信号进行同步,构成一个雷达网络,从不同的视角共同照射同一片海域.为了得到比对数据,还在蓬莱站安装了一套AIS接收机来获取雷达照射海域内的目标信息.
2.1 单站目标探测
图2是典型的雷达对某一目标单站探测的结果.图中空心点表示在一段时间内目标被雷达检测到的位置,而实心点则表示同一时间段内船舶自动识别系统(Automatic Identify System,AIS)记录的该目标的位置.空心点迹比实心点迹少很多表明:单站条件下目标的检测概率是相当低的,经常出现目标漏检的情况.而影响检测概率的一个很重要的因素就是检测门限[16],通过改变检测门限,来观察不同门限下检测概率的变化情况.
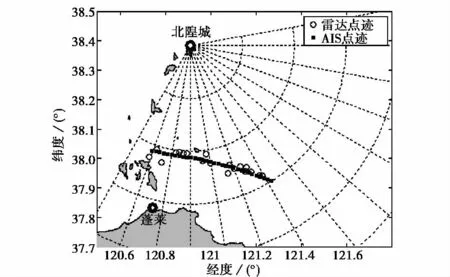
图2 北隍单站检测结果
检测概率是通过下面的方法来计算的:将三级检测得到的疑似目标信息与AIS记录的目标信息进行匹配[17],两者相差在一个距离元、两个多普勒元之内的则认为匹配成功,将匹配成功的场次数除以总的场次数就可以得到检测概率.对于匹配成功的目标,还要通过去重处理,从而保证雷达检测到的目标(以下简称雷达目标)与AIS接收机获取的目标(以下简称AIS目标)是一一对应的.
在2013年12月4日凌晨0点~3点之间的数据中,选出10条有代表性的船只航迹进行分析.如图3所示,图中每个距离环代表20km.这10条船只的基本信息示于表2中.按照Dzvonkovskaya的分类[18],除了一艘极大型和极小型船只外,剩下的8条都属于小型和中型船只.
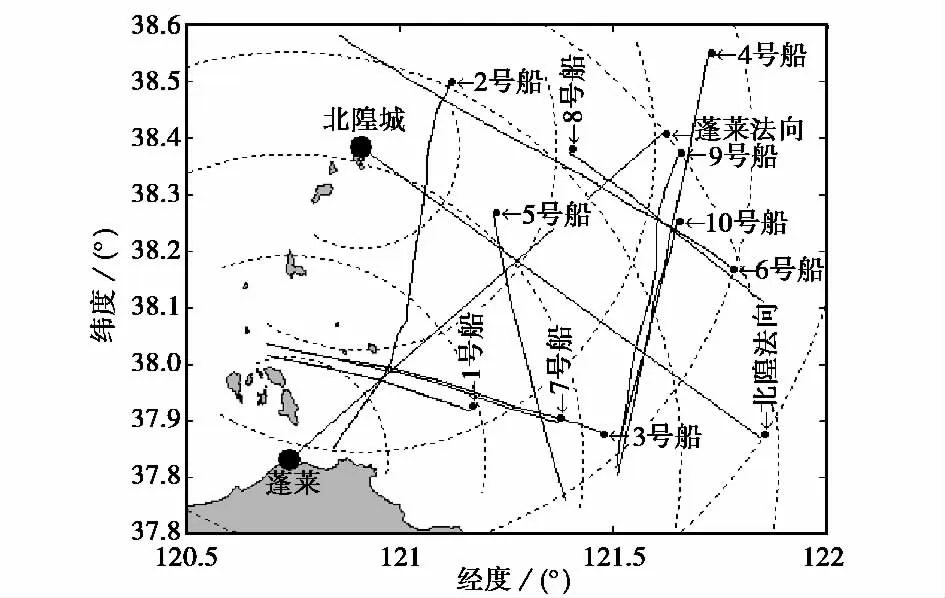
图3 所选10条船只航迹分布图
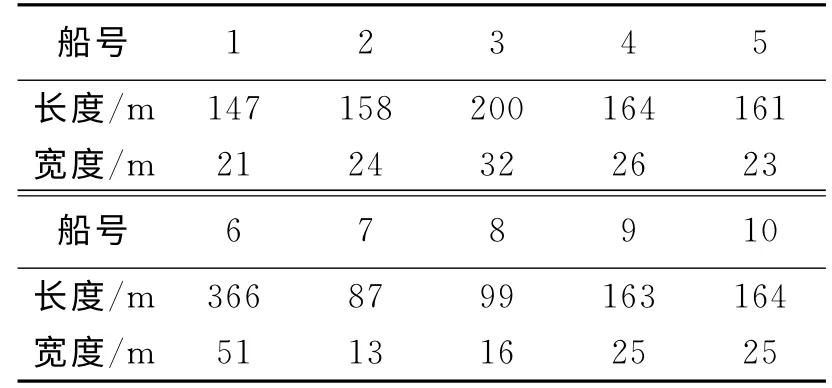
表2 所选10条船只的尺寸参数
按照前面所述检测概率的计算方法,得到不同检测门限下两个雷达站对10条船只的检测概率,如图4和5所示.
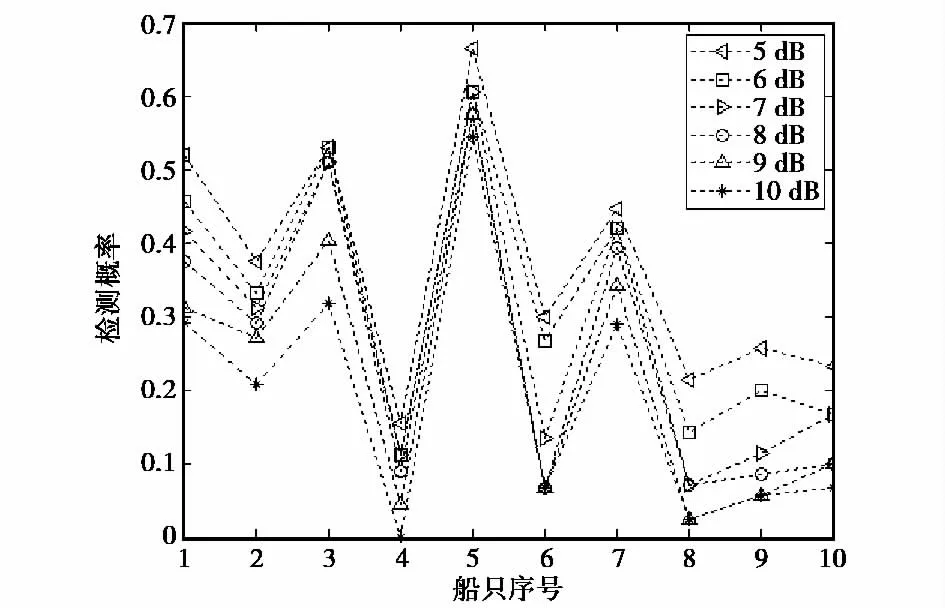
图4 蓬莱站不同检测门限下的检测概率
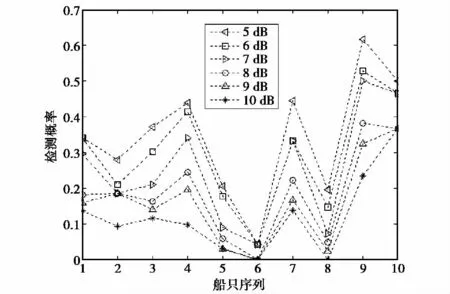
图5 北隍站不同检测门限下的检测概率
从图4可以初步得到以下结论:
1)随着检测门限的下降,检测概率逐渐提高.一般来说,检测门限每下降1dB,检测概率会有3~5个百分点的提高;
2)检测门限为5dB时,单站最高检测概率接近70%,但多数情况下低于50%,而检测门限上升到10dB时,部分船只出现检测概率为0的情况;
3)同一雷达站对不同目标的检测概率不同;
4)不同雷达站对同一目标的检测概率也不一样,两者甚至可能相差很大.
在检测门限为5dB时,第4条具体表现为:蓬莱站对4、9、10号船的检测概率都在25%以下,而北隍站相应的概率都在40%以上;类似的,北隍站对5、6号船的检测概率最高在20%左右而蓬莱站的则在30%以上;对8号船,两个站对它们的检测概率都仅有20%左右;而对1、2、3、7号船,两个站对它们的检测概率基本都在30%以上.
关于上述现象的产生原因现分析如下:
对4、9、10号船,它们有一个共同点就是与北隍站的距离都在60~80km的范围内,而在接近一半的时间里它们与蓬莱站的距离都在80km以上甚至超过了100km,所以初步认为距离因素是导致两个站对它们检测概率相差较大的原因之一.
而对5、6号船,它们与北隍站的距离都在80 km之内,但是北隍站对它们的检测概率却低于20%.尤其是6号船,检测概率最高也只有5%左右.分析发现,虽然它们与北隍站的距离和4、9、10号船的差不多,但是两者一个最大的不同在于航向.对后者而言,船只航向与北隍站径向的夹角在60°左右,电磁波是照射在船只的侧面,而5、6号船的情况则相反,它们的航向与北隍站径向的夹角很小,在远距离处甚至在20°以下,因此电磁波是照射在船只的背面.而由表2可以知道,船只的长度比宽度高出一个数量级,所以电磁波照射在船只正面或背面时,它的雷达散射截面会比照射在侧面时小很多,这会导致前者由于回波强度太低从而难以检测.
同时由于5号船距蓬莱在60km之内,而6号船距蓬莱在80~100km之间,且电磁波是照射在两条船只的侧面,所以蓬莱站对前者的检测概率最高时接近了70%,对后者虽然最高只有30%,但也已经比北隍站的5%高出许多.
另外进一步的分析发现,5号船在超过一半的时间内都被强烈的正一阶峰所淹没,这也是导致北隍站对它的检测概率较低的另一个重要原因[19].
除此之外还有一个必须要考虑的实际情况是:由于地理条件的限制,北隍站的天线是架设在一个南面的山坡上的,因此对于6号船在北隍站以北行进的时间里,由于大山的阻挡,雷达是无法检测到的.这一点同样会影响到北隍站对2号船的检测.
8号船的情况与6号船类似,只不过由于观测时间段内它没有行进到北隍以北的部分,所以虽然北隍站对它的检测概率也很低,但检测门限为5dB时也有20%,比6号船的5%高出很多.
对1、2、3、7号船,因为它们距两个雷达站都在60km以内,而且对1、3、7号船,电磁波都是照射在它们的侧面,所以在检测门限为5dB时,两个站对它们的检测概率都在30%以上.由于之前提到的大山阻挡的原因,所以与其他三条船相比,北隍站对2号船的检测概率稍低一些,略低于30%.
为了明确距离因素的影响,现对运动距离较长的目标进行分段统计,统计结果见表3.这里是以蓬莱站对2、4、9号船在检测门限为5dB时的情况为例进行说明,选择这三条船是基于两个考虑:1)它们的距离跨度都较大;2)在整个运动时间内,它们的航向与雷达径向夹角的变化相对较小,可以尽量排除其他因素的干扰.

表3 按距离分段统计检测概率
而这三条船在全程的检测概率分别为:37.5%,15.56%,25.71%,再结合分段统计的结果可以看出,近距离的检测概率总是高于全程的检测概率,而远距离的情况则相反,由此也可验证前面分析的准确性.
2.2 雷达视角的影响
以上只是对特定的10条船只的分析,现在将整个观测时间内检测到的船只随距离、船只航向与雷达径向夹角(以下简称夹角)的变化进行统计,蓬莱站的统计结果示于图6中.图中柱状图表示目标随距离或夹角的分布情况(它表示位于不同距离/夹角的船只数量占总船只数量的百分比),而曲线则代表相应的累积分布函数(该函数表示不超过该距离/夹角的船只数量占总船只数量的百分比).
从图6(a)中可以看出,AIS记录的船只集中在25km和80km附近,这也是两个主航道上的船只与蓬莱站的距离.雷达检测的结果与此类似,只不过10dB检测门限下,雷达在80km附近处检测到的船只比例显著下降,这正是由于距离太远导致的,与我们前面的分析一致.
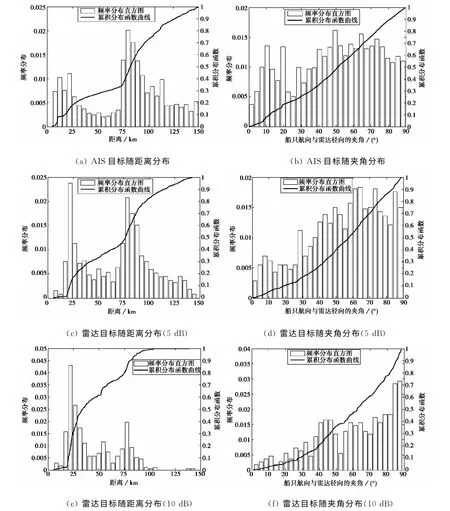
图6 蓬莱站目标随距离和夹角的分布情况
图6(b)则告诉我们,AIS记录的船只航向与雷达径向夹角在0~90°范围内近似于均匀分布,它的分布函数曲线是一条直线.而相应检测的统计结果图6(d)、(f)则表明:船只航向与雷达径向夹角在0~90°范围内不再服从均匀分布,相应的分布函数曲线也由直线变为下凹曲线,而且检测门限越高,下凹程度越严重.这表明雷达对航向与雷达径向夹角较小的目标的检测能力是比较弱的,且检测门限越高,这种能力越弱.这种现象在北隍站表现得更加明显,两个雷达站详细的统计数据列于表4中.
从表4可以更加直观地看出航向与雷达径向夹角对检测概率的影响:与AIS接收到的目标信息相比,10dB检测门限下,雷达检测出来的航向与雷达径向夹角小于30°的目标比例下降的幅度超过50%,同时大于80°的目标比例则提高了2倍以上.
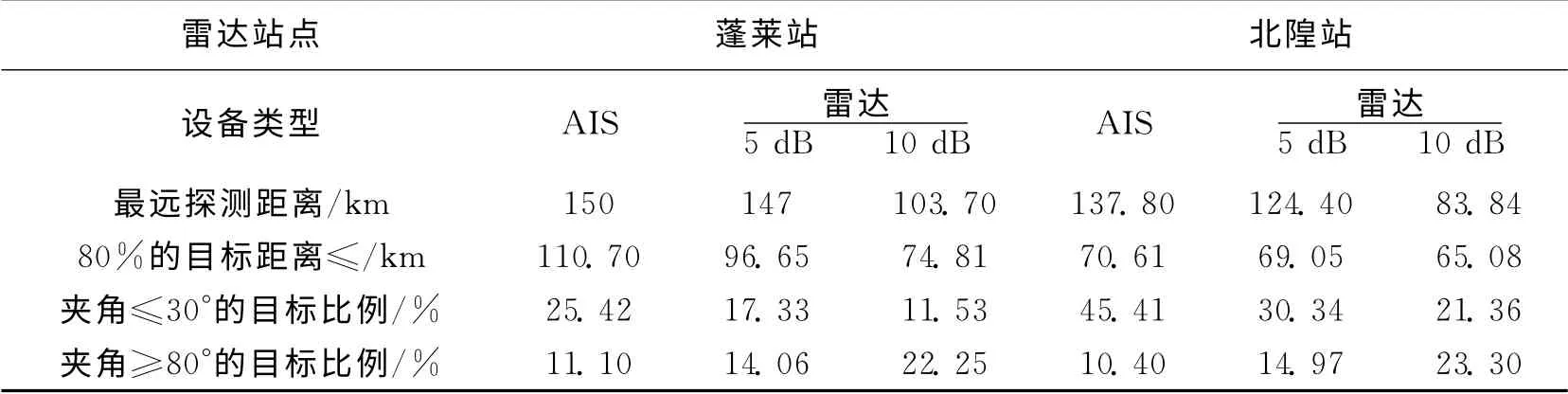
表4 蓬莱和北隍站目标的部分统计信息
2.3 双站联合探测
根据上述分析结果可知,单站条件下,目标与雷达站距离太远、航向与雷达径向夹角太小或者是径速引起的频偏刚好落在一阶峰附近时,都会造成检测概率的急剧下降.
而理论分析及仿真的结果都指出,双站的利用能改变这个不利的状况,有效提高检测概率.于是联合蓬莱和北隍两个站的数据对目标进行联合探测,只要目标被其中一个雷达站检测到,就认为目标存在.
由此得到双站条件下上述10条船只在不同检测门限下的检测概率,如图7所示.可以看出,检测门限为5dB时,已经有6条船只的检测概率接近或超过了70%,最高时达到80%,双站检测概率相比单站有10~20个百分点的提高.即使检测门限上升到10dB,也没有出现某条船只检测概率为0的情况,且相比单站仍有5~10个百分点的提高.
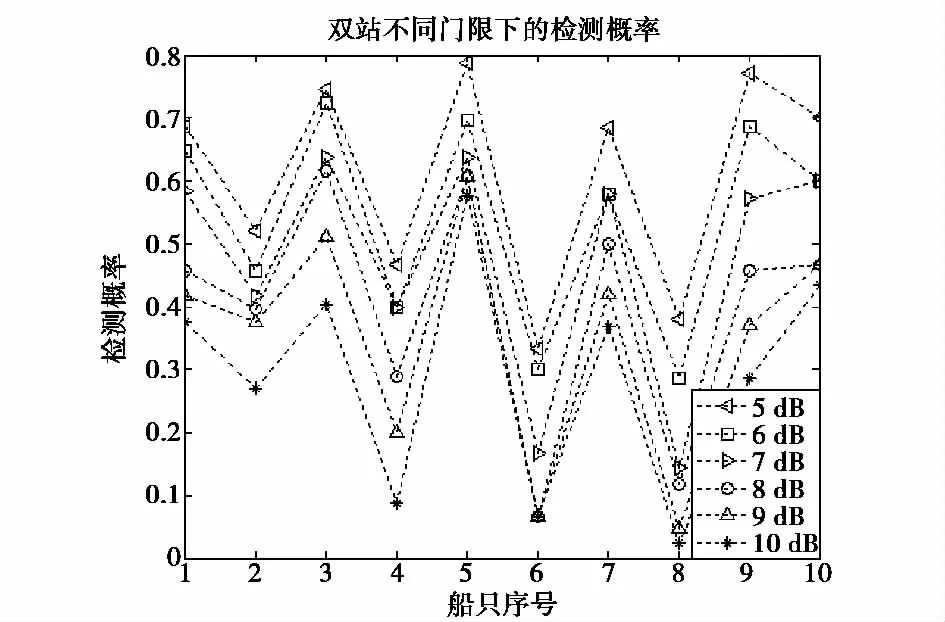
图7 双站不同检测门限下的检测概率
图8给出了数据融合后检测门限为5dB时实际的联合检测概率与理论检测概率的对比及不同检测门限下联合检测概率的平均误差曲线.从图中可以看出,联合检测概率平均误差最大时也仅有3.5个百分点,最小时仅仅1个百分点,用实测数据得到的联合检测概率与理论值吻合得非常好.
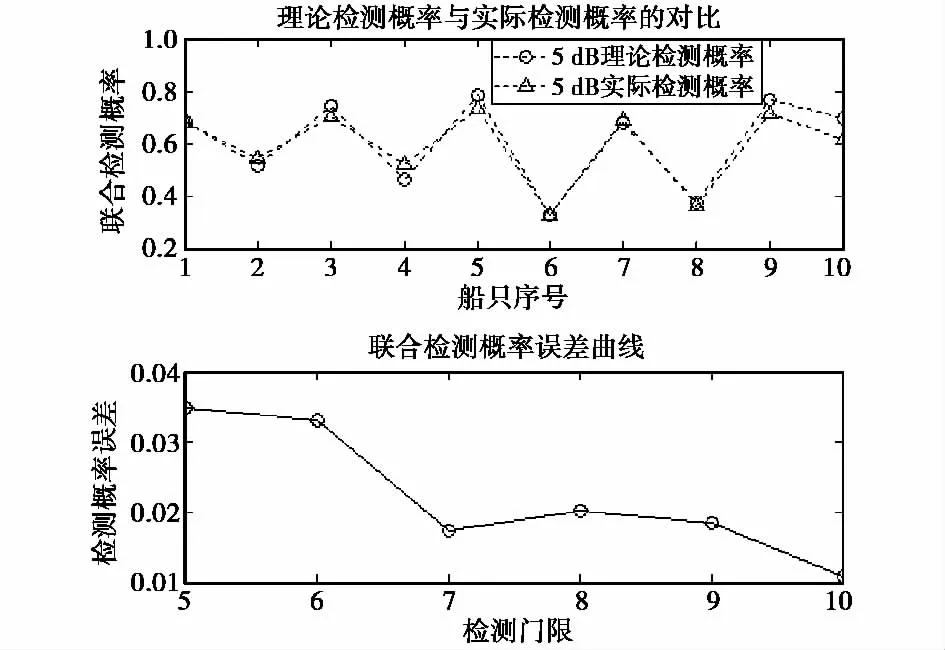
图8 检测概率对比及误差曲线
3 结 论
通过利用AIS信息,对便携式高频地波雷达的目标探测性能作了分析,指出了影响单站检测概率的几个因素:检测门限、距离、船只航向以及一阶峰.由于单站条件下目标检测概率很低,为了提高检测概率,通过雷达组网,将双站数据进行融合,使联合检测概率提高了10~20个百分点,最高可以达到80%,验证了便携式高频地波雷达组网探测目标的可行性.
[1]TIAN Yingwei,WEN Biyang,ZHOU Hao.Measurement of high and low waves using dual-frequency broad-beam HF radar[J].IEEE Geoscience and Remote Sensing Letters,2014,11(9):1599-1603.
[2]周 浩,文必洋,吴世才,等.亚帆赛间便携式高频地波雷达的海态观测[J].电波科学学报,2012,27(2):293-300.ZHOU Hao,WEN Biyang,WU Shicai,et al.Sea states observation with a portable HFSWR during the 16th Asian Games Sailing Competition[J].Chinese Journal of Radio Science,2012,27(2):293-300.(in Chinese)
[3]YANG Jing,WANG Ruokun,SHI Yangsheng,et al.Dual-use multistatic HF ocean radar for current mapping and ship tracking[J].IEICE Electronics Express,2014,11(12):1-6.
[4]ROARTY H J,SMITH M,GLENN S M,et al.Expanding maritime domain awareness capabilities in the arctic high frequency radar vessel-tracking[C]//Radar Conference.Ottawa:IEEE Press,2013:1-5.
[5]阮颖铮.雷达散射截面与隐身技术[M].北京:国防工业出版社,1998.
[6]HUANG Xiaojing,WEN Biyang,DING Fan.Ship detection and tracking using multi-frequency HFSWR[J].IEICE Electronics Express,2010,7(6):410-415.
[7]HYNES H,GARDNER R E.Doppler spectra of S band and X band signals[J].IEEE Transactions on Aerospace and Electronic System,1967,3(6):356-365.
[8]PEDERSON L,BARRICK D E.HF surface-wave radar revisiting a solution for EEZ ship surveillance[R/OL].[2014-06-27].http://www.codar.com/images/about/BarrPedeEEZ2004.pdf
[9]刘玉伟.高频地波雷达船只目标RCS预估[D].青岛:中国海洋大学,2011.LIU Yuwei.Estimation of Ship Target Radar Cross Sections for HFSWR[D].Qingdao:Ocean University of China,2011.(in Chinese)
[10]何 友,关 键,孟祥伟,等.雷达目标检测与恒虚警处理[M].2版.北京:清华大学出版社,2011.
[11]DI VITO A,MORETTI G.Probability of false alarm in CA-CFAR device downstream from linear-law detector[J].Electronics Letters,1989,25(24):1691-1693.
[12]雷志勇,文必洋,彭 念,等.基于恒虚警的高频地波雷达低速目标检测研究[J].电波科学学报,2007,22(5):774-778.LEI Zhiyong,WEN Biyang,PENG Nian,et al.CFAR-based HFSW radar low Doppler target detection[J].Chinese Journal of Radio Science,2007,22(5):774-778.(in Chinese)
[13]吴昌英,韦 高,许家栋.雷达组网目标检测性能的概率分析[J].现代雷达,2007,29(6):54-56.WU Changying,WEI Gao,XU Jiadong.Probability analysis of netted radar target detecting[J].Modern Radar,2007,29(6):54-56.(in Chinese)
[14]RAGHAVAN R S.Analysis of CA-CFAR processors for linear-law detection[J].IEEE Transactions on Aerospace and Electronic System,1992,28(3):661-665.
[15]潘 超,文必洋,周 浩.单极子-交叉环天线阵波束形成的分析[J].电波科学学报,2013,28(1):7-13.PAN Chao,WEN Biyang,ZHOU Hao.Analysis of array beamforming based on crossed-loop/monopole antenna[J].Chinese Journal of Radio Science,2013,28(1):7-13.(in Chinese)
[16]ROARTY H J,LEMUS E R,Handel E,et al.Performance evaluation of seasonde high-frequency radar for vessel detection[J].Marine Technology Society Journal,2011,5(3):14-24.
[17]ROARTY H J.,BARRICK D E,KOHUT J T,et al.Dual-use of compact HF radars for the detection of mid and large-size vessels[J].Turkish Journal of Electrical Engineering and Computer Sciences,2010,18(3):373-388.
[18]DZVONKOVSKAYA A,ROHLING H.HF radar performance analysis based on AIS ship information[C]//Radar Conference.Washington:IEEE Press,2010:1239-1244.
[19]ROOT B T.HF over-the-horizon radar ship detection with short dwells using clutter cancellation[J].Radio Science,1998,33(4):1095-1111.
