双目立体视觉动态角度测量方法
2015-03-07郭继平李阿蒙于冀平宋涛伍沛刚
郭继平李阿蒙于冀平宋 涛伍沛刚
(1.深圳市计量质量检测研究院,广东 深圳 518109;2.深圳大学光电工程学院,教育部光电子器件与系统重点实验室,广东 深圳 518060)
双目立体视觉动态角度测量方法
郭继平1,2,李阿蒙1,于冀平1,宋 涛1,伍沛刚1
(1.深圳市计量质量检测研究院,广东 深圳 518109;2.深圳大学光电工程学院,教育部光电子器件与系统重点实验室,广东 深圳 518060)
为实现对大幅度动态摆角及运动过程中物体空间姿态角的在线测量,提出一种基于双目立体视觉技术的动态角度测量方法。通过标定好的双目系统实时跟踪采集被测物体的特征点图像,重建特征点的空间三维坐标,进而计算出待测物的动态摆角或空间姿态角。实验结果表明:该系统在测量摆角时示值误差为±0.02°,测量空间姿态角时示值误差为±0.12°,同时具有非接触的优点,适用于动态摆角的在线测量及运动物体的空间姿态跟踪。
动态角度测量;几何量计量;双目立体视觉;在线测量
0 引 言
随着科技的进步,动态角测量需求越来越多,其中大空间范围内的动态角在线测量问题成为近年来的研究热点[1],如弯折试验机动态弯折角度测量、运动物体的空间姿态角定位跟踪等。
动态角度的大小随时间变化,因此要求其测量方法能够实时记录被测角在各个时间状态下的角度信息。综观国内外报道,有多种方法可用于探测动态角度[2]。其中,激光干涉测角方法测量准确度高,通常用于二维微小角度的精密测量[3]。基于莫尔条纹技术的测角方法系统结构相对简单、分辨率高,但需借助特定的光路才能实现,应用受到一定限制[4]。基于图像处理技术的测角方法便于进行实时测量,但其测量准确度有待提高,只能探测二维角度的变化[5-8]。基于计算机视觉的动态角度测量方法能实现三自由度动态角度测量,但测量准确度较低,需用点阵激光照射至平面物体表面,应用受到限制[9]。基于视觉技术的测量方法具有非接触、测量范围大、使用灵活的优点,可制成便携式测量系统,在空间动态角度测量中有较大的应用潜力。本文对大范围空间动态角度量的高准确度测量技术进行研究,提出一种基于双目立体视觉技术的动态角测量方法及系统,用于解决动态摆角及空间姿态角的在线测量。
1 基于立体视觉的动态角测量方法
1.1 立体视觉测量原理
基于立体视觉的动态角测量方法主要包括2个步骤:1)利用双目视觉系统(本文为两个CMOS相机)采集并重建出被测物体表面特征点的三维空间坐标;2)由特征点坐标参数计算相应的角度变化量。前者的基本原理可结合图1进行简要说明,物体空间(世界坐标系)中的物点P(xW,yW,zW),分别成像于CMOS1和CMOS2像平面上的P1(u1,ν1)、P2(u2,ν2)点。在齐次坐标系下,世界坐标系到相机成像平面图像坐标系之间的关系可由下式表示:
式中,Mi为大小为3×4的相机内参矩阵,矩阵中元素描述相机的焦距、主点位置、镜头畸变等参数,Ri、Ti是世界坐标系(xW,yW,zW)到相机坐标系(xCi,yCi,zCi)旋转平移变换矩阵。通过摄像机标定,可预先分别得到CMOS1和CMOS2相机的内参矩阵参数和世界坐标系到各自相机坐标系的变换矩阵[10],即得到Mi、Ri、Ti,i=1,2。通过二维图像特征提取算法可分别求出特征点在CMOS1和CMOS2中所成图像的像素坐标(ui,νi),i=1,2。将上述已知参数代入式(1)可得到4个方程,其中只有xW,yW,zW3个未知数,可得到唯一解。通过实时采集被测物体表面特征点图像并由上述原理计算出其空间三维坐标,便可进一步计算动态角度变化量。
1.2 动态角测量算法
动态摆角的运动轨迹在空间中一般是一个圆弧平面且为周期运动,其角度测量方法可通过跟踪被测对象摆臂上的一个特征点,由1.1节方法计算各个时刻特征点的空间三维坐标,再根据最小二乘法拟合出摆角平面及圆弧的圆心,并由此计算出各个时刻特征点到该圆心的向量,通过求解向量夹角得到。具体步骤可结合图2进行说明,设P为被跟踪特征点,测量时,双目视觉系统同步采集各时刻的特征点(P1,P2,…,PN)的图像,计算出其三维坐标后,拟合出该N个点所在的平面∏。同时将三维坐标投影到平面∏得到各点相应的二维坐标由这些二维坐标点拟合出圆心O(x0,y0),求出某一时刻点和初始点坐标到圆心的向量便可由下式计算出该时刻摆角变化量:

图1 双目立体视觉原理示意图

式中0≤θi<π。
利用Pi和P1在运动轨迹中的位置关系,可判断出摆角变化方向,由此可利用该方法对[-π,π]范围内的角度变化进行测量。实际应用中,被测摆动对象的运动轨迹并不是理想的圆弧平面,计算各时刻特征点坐标到平面∏的距离,可以进一步分析出被测对象在转动过程中的离面误差。

图2 旋转摆角测量示意图
对于空间姿态角度的测量,需同时跟踪被测对象表面上的3个特征点,计算出各时刻3个点的空间三维坐标,并由此拟合出各时刻此3点坐标决定的空间平面。各时刻物体的姿态角为该平面法向量与各坐标轴的夹角。实时跟踪采集3个特征点图像,便可通过计算其决定的平面法向量的变化求出空间姿态角的变化。
2 测量系统组成
根据上述测量原理设计便携式测量系统,主要包括CMOS相机、光源及控制盒、同步控制器、采集卡、运算处理器、标定板、跟踪特征靶、支撑架等部件。其中两个CMOS相机由同步控制器进行同步,同时采集被测对象各时刻的特征点图像。本文使用的特征点为白色圆形标志点贴纸,可方便粘贴于被测表面,对被测对象运动状态无影响。在特定的工况下也可用跟踪特征靶贴于被测物体表面实现跟踪测量。标定板用于对系统的参数进行标定,使用前大圆的圆心距经过校准作为尺度标尺。
本系统中CMOS相机型号为pointgrey FL3-U3,分辨率为1280×1024,最小曝光时间为0.01ms,同步图像采集帧率为60帧/s。受曝光时间和采集帧率的限制,使用该系统进行测量时,对被测物体运动速度有一定要求,当速度过快导致特征点图像模糊时便不能实现准确测量。另外,系统动态角度测量分辨力取决于采集帧率和角速度,帧率越高,角度变化速度越小,系统动态测量分辨力就越高。对摆臂长为500 mm,线速度为5 mm/s的动态摆角进行测量时,系统动态角度分辨力约为0.01°。而实际应用中有很多情况需要在动态工况下对最大角摆幅度进行测量,在边界处特征点摆动速度几乎为零,此时系统不受分辨力的限制可准确采集特征点图像,获得较好的测量准确度。
3 实验结果
为验证系统的动态角度测量功能,对弯折试验机的摆角进行测量。实验中将圆形标志点贴于摆臂上与旋转中心约100mm位置处。系统跟踪采集试验机摆动过程中标志点的图像,由1.2节算法计算出各个时刻的角度,绘制角度-时间曲线如图3所示。

图3 弯折试验机摆角跟踪测量结果曲线图
同时,为验证系统的测量准确度,利用Zeiss角分度头设计测量验证实验。该分度头可分别沿两个轴转动,产生两个方向上的角度变化(其角度示值经校准,U=0.001°,k=2)。其中一个方向为沿分度头圆盘面内旋转,每隔10°读取一个角度值直至旋转360°,产生36个标准角度变化用于验证摆角测量准确度。另一个方向为沿俯仰方向转动,每隔5°读取一个角度值,产生5°,10°,15°,20°,4个标准角度变化用于验证姿态角测量准确度。测量时仅需要保证特征点在系统视场范围内即可,无其他安装及定位要求。两次实验测量过程中,使分度头转盘处于旋转运动状态,到达各标准角度变化量时稍作停顿后继续旋转直至运动到最大角度位置。使用本系统对运动过程进行跟踪,由重建出的特征点三维坐标计算出角度测量值并与标准值进行比较。摆角测量误差曲线如图4所示,姿态角测量误差如表1所示。

图4 摆角测量误差曲线
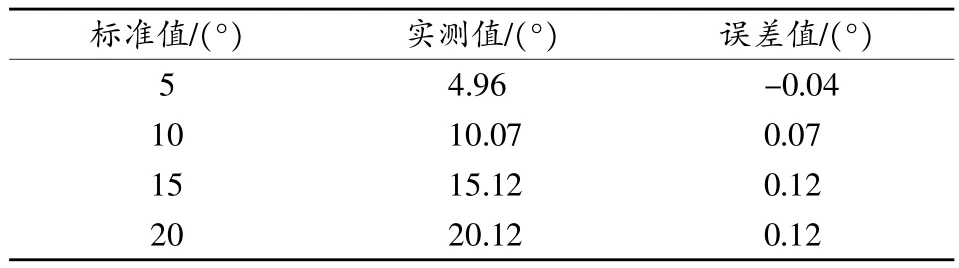
表1 空间姿态角测量实验结果
从图4及表1测量结果中可以看出,本系统在测量动态旋转角度时,测量误差可控制在±0.02°以内,测量空间姿态角误差值在±0.12°以内。需要指出的是:由于本文方法是基于视觉技术的动态角度测量方法,在测量过程中必须保持被测物体表面标志点在双相机公共视场范围内。对于旋转角测量,仅需要跟踪1个标志点即可;对于空间姿态角测量,需要同时跟踪测量视场范围内至少3个标志点。系统的测量准确度与双目系统的视场大小、基线长度、标志点尺寸、相机分辨率及物体运动速度等因素有关。本实验中,系统视场大小约为300 mm×300 mm,双相机基线长度约为200 mm,选用圆形特征标志点的直径为5mm,转盘旋转半径约为100mm,转动线速度约为5mm/s。
4 结束语
本文对大幅度动态角在线测量方法进行了研究,提出一种基于立体视觉技术的动态角测量方法,并研制出相应的便携式测量系统。实验结果表明,提出的方法可实现对动态摆角及空间姿态角的测量。在300 mm×300 mm视场范围内,动态摆角测量误差为±0.02°,对20°范围内变化的空间姿态角测量误差为±0.12°。能够满足弯折试验机、开关门试验机等的摆角测量需求。同时,该系统具有非接触的优点,在测量应用中不需要光轴平面与被测摆角平面垂直,可自由安装调试,适用于在线动态角度测量。此外,该系统可实时跟踪运动物体的空间位置轨迹,适用于振荡筛、运动导轨的在线状态监测,在工业生产和检测领域有较好的应用前景。今后,可进一步提升系统的图像采集帧率,提高动态分辨力,以提升该系统的测量能力和应用范围,推动计量检测技术在动态量在线测量方面发挥更大的作用。
[1]魏焕东,华建文,代作晓,等.空间傅里叶光谱仪高精密大范围动态测角技术[J].光电工程,2009(10):47-50.
[2]于冀平,郭继平.动态角测量方法研究进展[J].中国测试,2012(3):27-30.
[3]Masroor I,Ghazanfar H.Michelson interferometer for precision angle measurement[J].Applied Optics,1999,38(1):113-120.
[4]邓立新,杨建坤,戴穗安,等.莫尔条纹技术的三维测角方法研究[J].光学与光电技术,2010,8(3):39-41.
[5]朱国力,吴学兵,邹万军.基于PSD的角度测量系统[J].电表与仪器,2006,43(481):29-32.
[6]邹万军,朱国力,吴学兵.基于面阵CCD的激光角度测量系统的研究[J].光电工程,2006,33(10):91-95.
[7]徐东亮,刘辉.基于计算机视觉的缠绕角度检测系统[J].机电工程,2008,25(8):50-52.
[8]Li W M,Jin J,Li X F,et al.Method of rotation angle measurementin machinevision based on calibration pattern with spot arry[J].Applied Optics,2010,49(6):1001-1006.
[9]江洁,苗准,张广军.点结构光动态姿态角测量系统[J].激光与红外,2010,39(3):532-536.
[10]丁菁汀.立体视觉在实际应用中的若干问题研究[D].杭州:浙江大学,2012.
Dynamic angle measurement method based on stereo vision
GUO Jiping1,2,LI Ameng1, YU Jiping1, SONG Tao1, WU Peigang1
(1.Shenzhen Academy of Metrology&Quality Inspection,Shenzhen 518109,China;2.College of Optoelectronics Engineering,Key Laboratory of Optoelectronic Devices and Systems,Education Ministry of China,Shenzhen University,Shenzhen 518060,China)
In order to measure dynamic large swing angle and attitude angle of moving object,a dynamic angle measurementmethod based on stereo vision hasbeen presented.Firstly,the sequence images of object with point features are captured synchronously by a calibrated stereo system.Secondly,the 3D coordinates of the point features are reconstructed.Finally,the angle variation is calculated out by a specific algorithm.Experiment results show that the error of the system can reach to ±0.02°for swing angle measurementand ±0.12°for attitude angle measurement.This method can be used to measure the dynamic angle and to trace the attitude angle online with the advantage of non-contact.
dynamic angle measurement;geometric metrology;stereo vision;online measurement
A
:1674-5124(2015)07-0021-03
10.11857/j.issn.1674-5124.2015.07.005
2014-12-08;
:2015-02-18
国家自然科学基金项目(61201355,61377017)深圳市科技研发资金(CXC20110506038A)
郭继平(1985-),男,安徽泾县人,博士,主要从事几何量计量及光学三维成像与测量方面的研究。
