高压辊磨机挤满给料控制系统开发与应用
2015-03-05尹丰丰
尹丰丰,王 旭,王 清
(1.北京矿冶研究总院,北京100160;2.矿冶过程自动控制技术北京市重点实验室,北京100160)
在选矿行业生产规模化、设备大型化及原矿品位不断降低的大背景下,节能降耗已成为企业降本增效的主要手段。但受限于来料矿石块度、硬度及含泥量等频繁波动的影响,仅依靠人工操作经验来调整工艺控制参数,已不能及时应对工况变化,不可避免导致生产波动,影响选厂产能。碎磨是矿物加工过程的首道工序,也是能耗最高的作业工序,通常破碎和磨矿系统的功耗约占金属矿山选矿厂能耗的50%~70%。“多碎少磨、细碎入磨”是提高生产效率降低选矿成本的重要途径。
高压辊磨机作为一种新型的高效粉碎设备,除了具有提高矿物解离度和浮选回收率等优势以外,在节能降耗方面效果十分显著。据有关数据表明,高压辊磨机与其他破碎设备相比,平均节能可高达20%以上。目前,该设备在我国有色金属矿山碎磨流程已逐步开始使用。
1 高压辊磨工艺流程及设备介绍
我国某大型黄金矿山选矿厂破碎工艺采用三段一闭路流程,2台HP500圆锥破碎机作为中碎设备,1台高压辊磨机作为开路细碎设备,破碎产品粒度可满足P80=10mm,日处理能力近万吨,其工艺流程见图1。
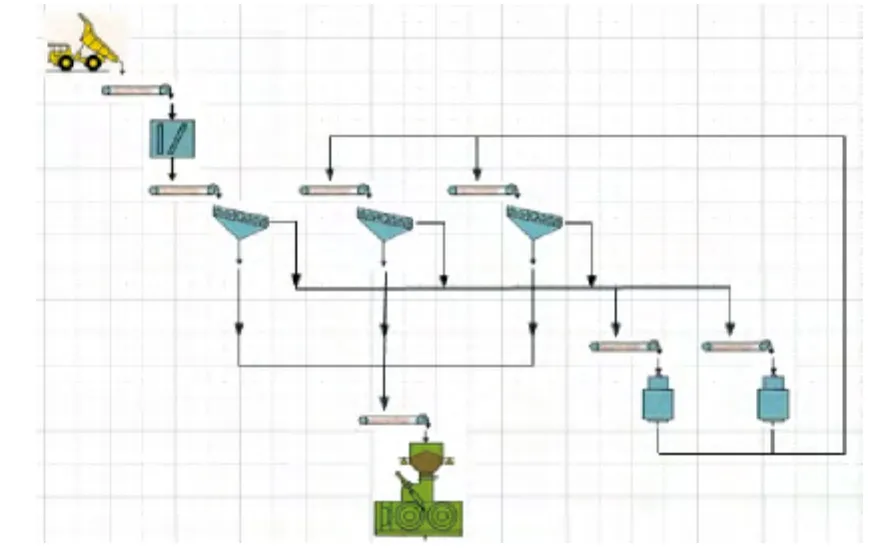
图1 某黄金选矿厂破碎工艺流程图
高压辊磨机主要由给料装置、一对挤压辊、传动装置、液压和润滑系统等组成。其中,挤压辊又分为定棍及可水平移动调节的动棍。液压系统根据給入物料的性质提供合适的压力来保证动辊移动到预期位置,以形成合格粒度的产品[1]。高压辊磨机结构见图2。
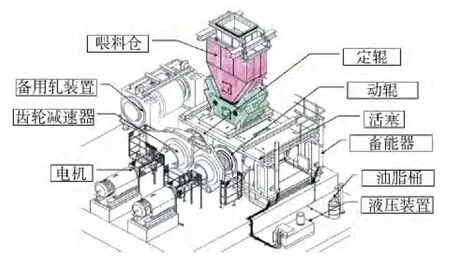
图2 高压辊磨机结构简图
在实际生产过程中,矿石经由胶带给矿机均匀給入辊磨机的喂料仓,并随着定辊和动辊的转到向下运动。此时,已由单纯的矿石颗粒破碎逐渐变成为物料层间的挤压粉碎[2-4]。物料层在辊间高压下形成,颗粒在压力迫使下互相挤压,并且产生了大量裂纹,而且也不存在类似于球磨机中的无效撞击和摩擦,绝大部分能量均用于粉碎,因而其能效也较高。所以高压辊磨机用于球磨机前替代部分粗磨的工作对选矿节能与提高部分选别指标有益[5]。
2 给料问题分析及控制目标
2.1 给料问题分析
高压辊磨机在有色金属矿山的应用仍处于起步阶段,直到2003年世界第一台黄金矿山样机才开始投产。在国内,某大型黄金矿山于2013年率先将高压辊磨机应用到黄金选矿过程中。但由于缺乏操作经验,设备控制效果不尽如人意,并没有最大限度地发挥设备的潜在生产能力。如表1所示,为该黄金选矿厂2014年高压辊磨机运行时间统计表。从该表中可以看出,由于人为操作不当等原因,造成设备空载运行时间平均超过20%,严重制约了整个黄金选厂的产能提升。
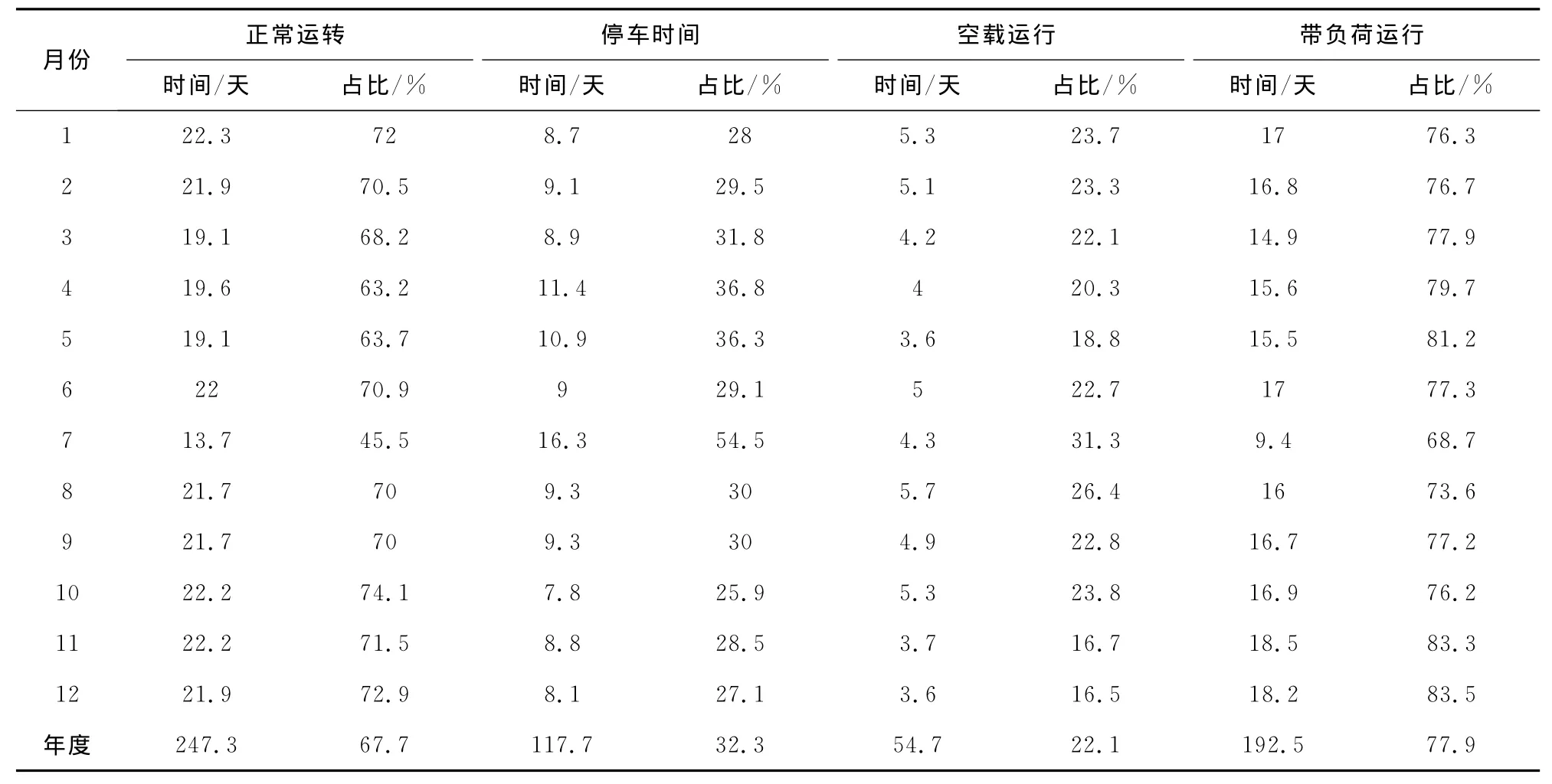
表1 2014年某黄金选矿厂高压辊磨机运转时间统计
在高压辊磨机正常运转的过程中,动辊的挤压粉碎力是通过物料层传递给定辊的,因此两辊间必须存在一层物料,作为料层粉碎的前提条件。为了发挥设备的最大效能,降低其空载运行时间,这就要求高压辊磨机作业能够获得充分连续的给矿,即实现挤满给矿控制。
在理想条件下,基于物料平衡原理,高压辊磨机的给矿量应与其排矿能力一致,保持喂料斗的料位稳定,进而使得高压辊磨机始终工作在一个较为稳定的负荷范围内。然而实际生产中,一方面受給入矿石性质变化的影响,比如矿石块度及硬度的波动,在辊缝保持不变的条件下,物料在设备内的流通能力势必会发生变化,进而造成喂料斗料位的变化。当料位偏低时,将会影响设备料层粉碎的效果,当料位特别低时,由于没有形成垫料层,减少了新給入物料在辊磨机内部挤压破碎的时间,排矿产品粒度将明显偏粗,设备工作效率降低,与此同时,辊面磨损严重,设备维护成本大幅增加;相反地,当喂料斗料位偏高时,易造成喂料斗冒矿,需要被动停车处理。另一方面,受上游生产流程异常、设备故障等影响,高压辊磨机的给矿缓冲料仓也会出现供料不及时的情况,此时,高压辊磨机的给料控制系统也应作出相应处理,防止设备长时间空载运行。
2.2 控制目标
为了保证高压辊磨机发挥其最大的作业效率,必须对高压辊磨机实施挤满给料控制。因此,首先需要对给矿缓冲矿仓及高压辊磨机喂料斗的料位实施监测,同时通过调节给矿机运转频率实现对给矿量的自动控制。需要说明的是,由于喂料斗容量有限,这里采用抗干扰能力更佳的称重装置,通过体积换算间接得到喂料斗的料位值。依据喂料斗的实时料位值,来自动调节胶带给料机的带速,进而控制料位,达到挤满给料的控制目标。
考虑到生产过程中可能出现的异常情况,高压辊磨机给矿控制系统也应具备连锁保护停车功能,比如在高压辊磨机异常停车,排矿皮带异常停车,给料过铁等情况发生时;同时,针对由于矿石含泥量大粘度大造成的高压辊磨机喂料斗堵塞、给矿缓冲矿仓下料口堵塞等异常工况应具备自动识别及相应的保护功能,以保证高压辊磨机作业回路的持续稳定和高效。
3 挤满给料控制策略
3.1 挤满给料专家控制算法
由于高压辊磨机给矿过程具有滞后性,加之给矿性质变化造成的扰动,常规PID控制有一定难度,容易造成高压辊磨机喂料斗料位大幅波动,无法满足生产控制需要。
为了提高控制性能,本文提出了具有高压辊磨机挤满给料专家控制算法。该控制算法立足于历史生产数据,结合人工操作经验,提取出若干 “IF THEN”控制规则,根据当前控制量的误差及误差变化率的变化情况,由“IF-THEN”规则预测控制输出量的变化,以期达到快速响应的目的。算法结构如图3所示。
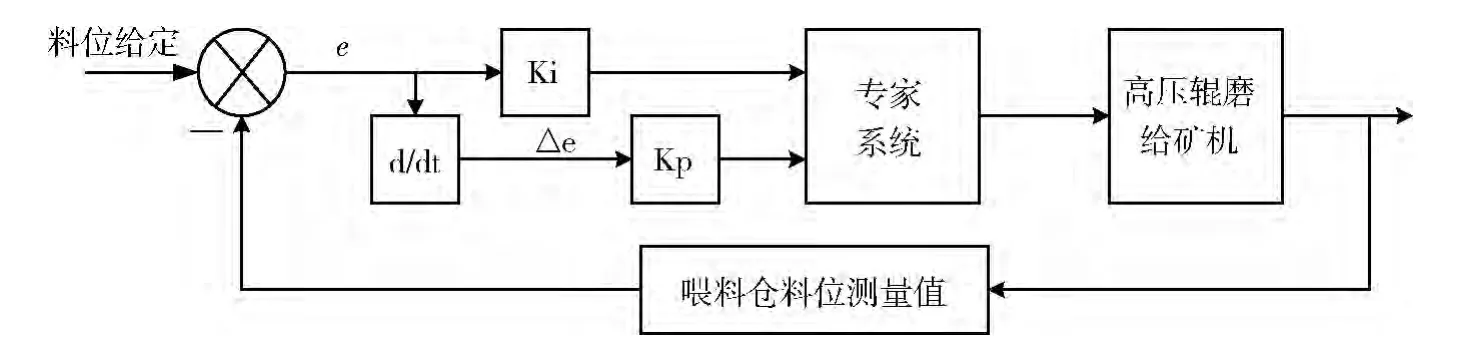
图3 控制算法结构图


3.2 异常工况识别与处理
为了保证高压辊磨机作业回路及设备的安全,仅仅依靠挤满给料控制器还是不够的,我们需要对高压辊磨机作业回路的异常工况和故障进行识别,并在给矿控制系统中作出及时的响应。针对实际生产过程中出现过的异常工况,分为以下三种情况。
1)给矿机下游作业回路设备故障停车。当包括高压辊磨机及排料皮带等在内的给矿机下游设备发生异常而故障停车时,给矿机立刻连锁停车。
2)高压辊磨机喂料斗堵塞。由于给矿中可能含有杂物,或给矿含泥量较大容易造成高压辊磨机喂料斗堵塞。在给矿控制输出不断减小的前提下,当控制系统识别出高压辊磨机喂料斗料位超过设定值且持续增加时,系统判定喂料斗有可能发生堵塞,自动触发给矿机停车,并给出报警提示。
3)给矿缓冲矿仓空料或下料口堵塞。在给矿控制输出不断增加的前提下,当控制系统识别出高压辊磨机喂料斗料位持续减小,且给矿机及高压辊磨机的设备负荷偏小时,系统判定给矿缓冲矿仓料或下料口堵塞,控制器自动记录当前控制输出量后给出给矿机停车指令,下次给矿机将已上一次记录的控制输出值作为初始启动频率。
4 挤满给料自动控制系统设计与应用
4.1 自动控制系统设计
本高压辊磨机挤满给矿控制系统选择GE 3i冗余系列CPU作为主控器。给矿机的监控信号以及高压辊磨机给矿缓冲矿仓的料位信号等分别通过Profibus-DP及Profibus-PA接口送入远程IO站中,CPU与远程IO站间,以及高压辊磨机成套S7-300控制器间通过以太网建立通讯连接。CPU采集到的现场实时数据经数据采集服务器后显示到控制室集中监控画面上。整个控制系统结构见图4。
本高压辊磨机挤满给料自动控制系统操作画面分为连锁控制和回路控制两个部分,见图5。在连锁控制画面区域中,主要实现的是给矿连锁保护停车功能;在回路控制画面区域中,可以实现给料的手动与自动的无扰切换。在自动控制条件下,可以实现本文如前所述的挤满给矿控制功能。
4.2 工业应用
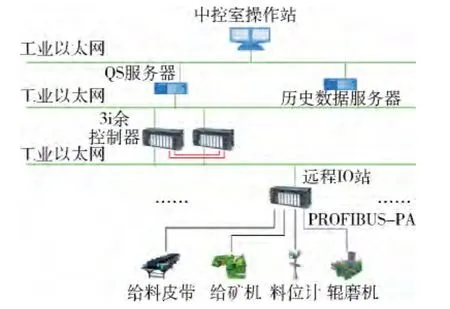
图4 挤满给料自动控制系统架构图
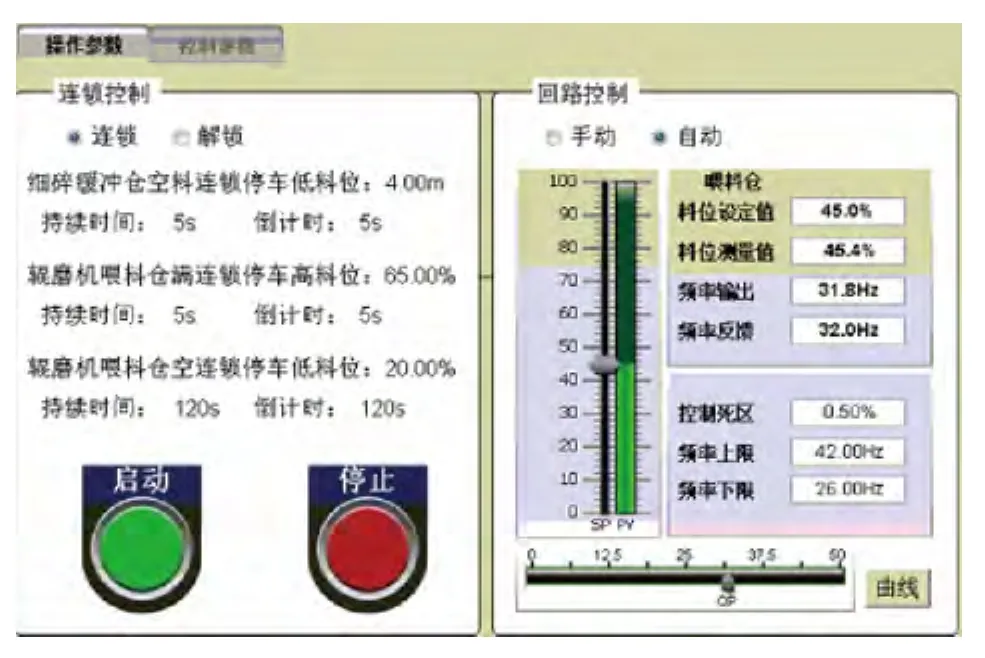
图5 挤满给料自动控制画面
本高压辊磨机挤满给矿自动控制系统已在国内某大型黄金矿山选矿流程高压辊磨机作业回路投入了使用,高压辊磨机挤满给料控制曲线见图6,其中处于画面上部的浅色虚线为辊磨机定辊电流(范围0~600A),画面下部的深色曲线为辊磨机喂料斗料位(范围0~100%)。由图6可知,喂料斗料位值很好地稳定在了工艺要求的45%附近,与此同时高压辊磨机的负荷曲线也十分稳定,表明了设备工作状态的稳定。与常规PID控制相比,该套专家控制算法很好的解决了给矿调节的滞后问题,无论是在调节时间,抗扰动能力还是鲁棒性都有了很大的改善。
图7所示为高压辊磨机异常工况识别与故障诊断报警画面,该系统成功识别出了辊磨机喂料斗堵塞,给矿缓冲矿仓空料等异常工况,并自动触发系统停车,起到了预防事故扩大化及降低设备空转率的作用。
5 结 语
针对高压辊磨机在实际生产运行过程中,空载运行时间长,设备利用率低的问题,本文提出了一种高压辊磨机挤满给料专家控制策略。该控制算法调节速度快,并且具有较强的鲁棒性。与此同时,考虑到高压辊磨机作业回路中潜在的异常工况,控制系统进行了故障识别与诊断,并且与给矿控制系统联动,保证了整个高压辊磨机作业回路的生产安全。实际工业应用结果表明了该高压辊磨机挤满给料控制系统的有效性。

图6 高压辊磨机挤满给料控制曲线

图7 故障监测表截图
[1] 刘红军,张升奇,邵彬,等.高压辊磨机在冶金行业的开发及应用[J].矿山机械,2006(10):152-153.
[2] Klymowsky I B,Liu J.Recent progresses in the modelling of comminution in a Roller Press[J].ZKG International,1997(9):500-510.
[3] 刘建远.高压辊磨机粉碎数学建模和计算机模拟研究进展[J].金属矿山,2010(8):1-6.
[4] 邓岭.压辊磨机关键工艺参数优化研究[D].长沙:中南大学,2012.
[5] 张勇,尚旭.选矿厂高压辊磨机破碎系统的自动控制研究[J].有色设备,2014(1):4-8.
