基于线性CCD双轮平衡车系统的设计
2015-03-04刘德强
刘德强
(吉林铁道职业技术学院,吉林 吉林 132001)
基于线性CCD双轮平衡车系统的设计
刘德强
(吉林铁道职业技术学院,吉林 吉林 132001)
该控制系统采用飞思卡尔MC9SXS128单片机作为控制核心,利用128*1线性CCD进行道路信息采集;采用卡尔曼滤波算法进行陀螺仪和加速度计信息融合,计算出车模的角度和角速度,调整车模保持平衡。整个系统由道路信息采集系统、直立控制系统和速度控制系统三个闭环组成,实现车模直立、加速、减速、过路障和过桥等各种复杂动作。上位机监测系统接受无线模块上传的数据信息,经过处理、分析,使车模能够快速、准确、稳定地跟踪引导线。
线性CCD;卡尔曼滤波;平衡车;自动控制
近年来,随着自动控制技术的发展,代替步行的智能化的两轮平衡车受到了广泛的关注。两轮自平衡小车是一个高度不稳定两轮机器人,是一种多变量、非线性、绝对不稳定的系统,是检验各种控制能力的典型装置,对于传感器技术和智能控制技术提出了更高的要求。
基于控制系统对于响应速度和精度的要求,MMA7260加速度传感器和NEC_03陀螺仪经由卡尔曼数字滤波后得到车模实时、准确的信息。控制核心CPU倍频至64MHZ,强劲的运算速度处理数据,以满足系统的需求。
1 控制系统
(1)系统设计原理。本系统以两轮双电机车模为研究对象,该系统包括四部分:平衡系统,CCD视觉导航系统、控制决策系统、动力系统。其中平衡是重点。两轮车平衡原理,即依照倒立摆的原理使其达到动态平衡的状态。车模有两个轮子着地,当车体在垂直静止的情况下,车模可以维持短暂的平衡状态。当车体发生倾斜时,为了使车模保持平衡状态,车体需要给车轮施加与车体倾斜方向相同且适当的外力。因为外力过大、过小都不能维持车体平衡。
(2)系统组成与概述。系统以MC9SXS128单片机为控制核心;道路信息采集模块、角度及角速度测量模块、速度测量模块作为检测单元;两个直流电机作为执行机构 。
2 硬件设计
硬件电路的设计是整个智能车系统的基础。本系统采用MC9SXS128单片机为控制核心,硬件结构主要包括:电源管理单元、线性CCD单元、三轴加速度传感器和陀螺仪单元、无线数据传输单元、电机驱动和速度检测单元等。智能车硬件结构框图如图1所示。
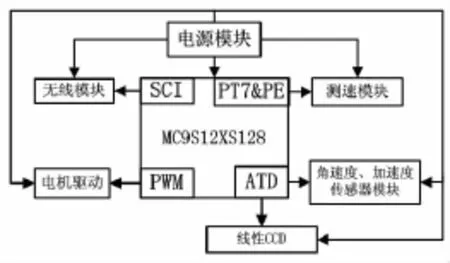
图1 硬件系统整体结构框图
3 软件设计
整个系统由直立控制、速度控制和道路信息采集三个闭环系统,以及各个模块配合完成的。
3.1 角度信号采集与处理
理论上本系统只需通过加速度计获得一个方向的加速度值,即可计算出角度值。加速度计输出值和倾角关系式:
A Design on A Two-W heeled Balance Vehicle System Based on Linear CCD
LIU De-qiang
(Jilin Railway Vocational and Technical College,Jilin,Jilin 132001,China)
The controlsystem adopts the single chipmicrocomputer freescale MC9SXS128 as its controlcore,itcollect road information with a 128*1 linear CCD;Kalman filtering algorithm is adopted to integrate the information about gyroscope and accelerometercalculate theangleand angularvelocityofthemodel,adjustand balance themodel.Thewholesystem composed three closed loops,including road information acquisition system,verticalcontrolsystem and speed controlsystem,whichhelpstomodels to erect,speed up,slow down,pass roadblock and crossbridgesand carry outother complexmotions.PCmonitoring system would receivethedataand informationuploaded bywirelessmodules,afterprocessingand analysis,itwouldmakemodelstrack guide lines rapidly,accuratelyand stablely.
linear CCD;Kalman filter;Balanced car;automatic control
TP273
A
2095-980X(2015)07-0035-01
2015-06-15
刘德强(1973-),男,硕士,讲师,主要研究方向:铁道车辆电气及电气传动控制技术。
