基于自适应模糊PID控制的整流器设计与实现
2015-03-03曾小波旷永红
曾小波,旷永红
(1. 湖南理工职业技术学院,湘潭 411104;2.湖南工程学院 工程训练中心,湘潭 411104 )
参 考 文 献
基于自适应模糊PID控制的整流器设计与实现
曾小波1,旷永红2
(1. 湖南理工职业技术学院,湘潭 411104;2.湖南工程学院 工程训练中心,湘潭 411104 )
针对现有电化工业电解槽极化电源主电路普遍采用晶闸管相控整流方案存在的不足,提出了采用交-直-交-直的新型主电路方案,并采用自适应模糊PID控制方法进行软件设计.阐述了电源系统方案的设计、系统主电路结构及工作原理、控制电路分析.重点研究了自适应模糊PID控制方法的基本原理及软件实现,并对其控制效果进行了建模和仿真分析,与常规PID控制算法进行了对比实验分析.结果表明:自适应模糊PID控制算法相比常规PID控制算法具有响应速度快、超调量小、稳定时间短、电源输出谐波少、静态和动态性能好等特点.具有良好的应用价值.
自适应模糊PID;极化电源;整流器;DSP;仿真
0 引 言
在电化工业上,电解槽的阴极常采用极化电源进行保护,电源电流在几十安到几百安不等.极化电源具有两个作用:一是当大功率主电源突发故障停止时,极化电源立刻投入;二是电解槽停电检修时,投入极化电源.极化电源主要是向电解槽提供一定的直流电,阻止阴极向外放电,保护电解槽阴极镀层不脱落,提高电解槽阴极的电流效率及使用寿命.电解槽的离子膜对极化电源质量要求高,除了要求静态精度和动态过程好以外,还要求不能有较大幅度的波动,一旦投入,极化电源马上进入额定值,时间短,过冲小.同时必须减少设备运行过程中产生的谐波和提高整流设备的安全性和可靠性.
当前国内大部分厂家电解槽的极化电源在300 A以下,整流电路通常采用晶闸管模块相控整流的方案实现,该方案中由于晶闸管常处于深度控制状态,导致无功损耗和谐波分量大、功率因数低、电网污染严重、能量损耗严重等不足.本文提出一种大功率高频电源作为极化电源.采用交-直-交-直的主电路结构,二极管全桥整流和IGBT全桥逆变作为主电路;控制部分采用DSP为核心控制器,控制软件部分采用自适应模糊PID控制算法的解决方案.该方案能大大减小整流器的体积,且不需要体积庞大的工频变压器,工作效率高达到95%、节能在35%以上,具有良好的应用价值.
1 整体方案
极化电源系统方案如图1所示.
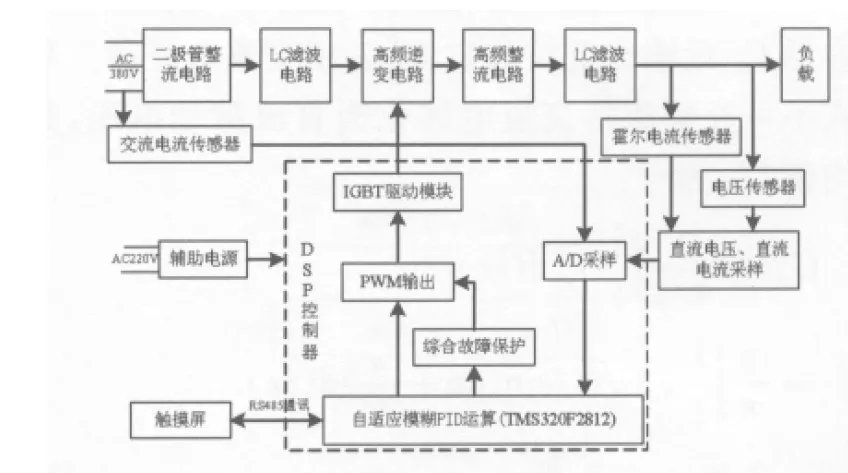
图1 系统整体框图
系统由主电路、控制电路、辅助电源电路、触摸屏等部分组成.主电路主要由二极管桥式整流电路、LC滤波电路、IGBT单相桥式逆变电路、高频整流电路、LC滤波电路组成,实现三相电源的整流、逆变、整流输出的变流作用.控制电路主要由电压和电流采样、综合故障保护、RS485通讯、PWM脉冲生成、IGBT驱动等部分组成.主要功能是DSP通过采样得到的数据与来自触摸屏给定值进行自适应模糊PID运算后,输出PWM脉冲.IGBT驱动模块电路驱动全桥IGBT电路实现高频逆变功能.辅助电源为控制电路、IGBT驱动电路、保护电路提供工作电源.
2 硬件电路设计
2.1 主电路设计
极化电源主电路如图2所示.主电路采用交-直-交-直的变流模式,即通过整流-逆变-整流的过程得到需要的直流电压和直流电流.交流侧三相380 V交流电压通过空气开关Q,经过三相桥二极管整流模块DT1整流和Lin、Cin、C1组成的滤波电路滤波后,输出高压低纹波直流;再通过IGBT(Q1、Q2、Q3、Q4)全桥逆变电路,逆变为高频方波交流;方波交流经过高频变压器T1变换,再经由肖特基二极管D5、D6整流后输出脉冲直流,经平波电抗器L0、电容器C0后输出低纹波直流.三相交流电经过三相桥式不可控整流将交流电转化为直流脉动电压,其平均值Ud为[1]:

图2 极化电源主电路图
(1)
(1)式中U为交流输入相电压有效值,Ul为交流输入线电压有效值,即Ud约515 V.经过IGBT的单相全桥逆变和高频变压器降压,高频变压器二次侧交流电流通过零式双半波整流回路整流后,通过LC滤波回路滤波,得到平滑的直流输出.在稳态运行条件下,输出电压和输入电压的关系为:
(2)
式(2)中,U0为IGBT的单相全桥逆变电路之前的直流电压,Ui为肖特基二极管输出后的电压,n为高频变压器原、副绕组匝比,TS为PWM波的周期,ton为开关管开通时间,αt为占空比.通过控制开关管IGBT的占空比即可得到所需输出电压,工程上占空比调节范围为0%~98%,以及系统运行中器件的压损,输出可调范围为0~500 V[2].
2.2 控制电路设计
控制电路如图1中控制部分所示,由DSP控制器及外围电路、A/D采样电路、IGBT驱动电路、RS485通讯电路等电路组成.控制电路工作原理为:利用DSP芯片TMS320F2812自带的12位A/D电路的转换功能,经过电压传感器、霍尔电流传感器、交流电流传感器采样,分别得到直流电压、直流电流、交流电流,与触摸屏(或上位机)的给定值进行模糊自适应PID运算后,得到PWM信号的占空比.再由TMS320F2812的EVA模块产生PWM脉冲控制开关管IGBT的导通和关断,实现单相全桥电路的逆变功能,实现稳定输出直流电压或直流电流的目的.
3 自适应模糊PID控制算法研究
3.1 自适应模糊PID控制的数学模型
自适应模糊PID控制器是在常规PID控制器的基础上,以误差e及误差变化率ec为输入变量,以PID控制算法的调节参数ΔKP、ΔKi、ΔKd为输出变量,实际响应与最佳响应的差别为控制指标,根据不同时刻的e和ec对模糊控制器PID参数进行在线自整定,确保不同运行状况下控制系统具有良好的性能[3].电解过程中负载随电解液的浓度变化,导致电解槽的电压和电流是一个高度非线性、时变的随机不确定的过程.为了更好的对电流、电压幅值进行控制,系统采用自适应模糊PID控制方式,使被控对象具有良好的动态和静态性能.极化电源系统的自适应模糊控制PID控制器结构如图3所示[4].通常,PID控制器的控制算式为:

u(k)=kpe(k)+kiΣe(k)+kdec(k)
(3)
式(3)中,Σe(k)=e(k)+e(k-1)和ec(k)=
e(k)-e(k-1)(k=0,1,2),分别为其输入变量偏差与偏差变化,Kp、Ki、Kd分别为表征其比例、积分、微分作用的参数.
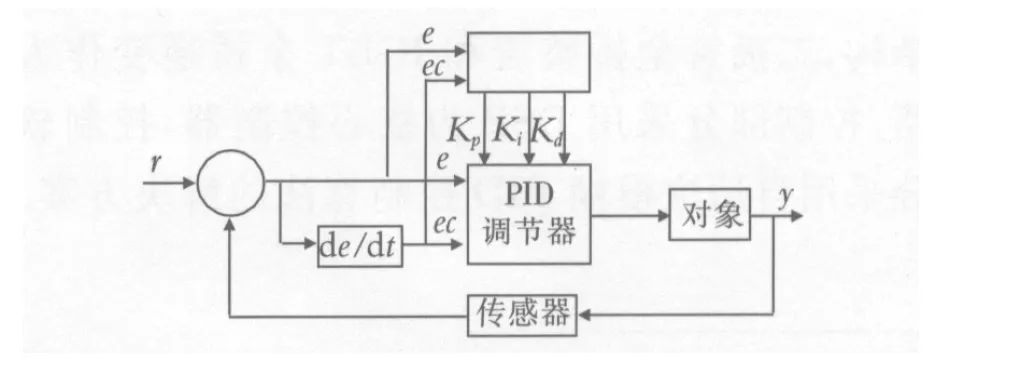
图3 自适应模糊控制器结构框图
3.2 自适应模糊PID控制器的设计
3.2.1 模糊化
模糊化是将确定的物理量输入转换成模糊矢量,此过程借助输入量比例因子来实现.设定输入变量为误差e和误差变化率ec,输出为ΔKP、ΔKi、ΔKd,系统中e、ec、ΔKP、ΔKi、ΔKd的模糊子集为{负大,负中,负小,零,正小,正中,正大},简记为{NB,NM,NS,ZO,PS,PM,PB}.输入变量e、ec对应的隶属度函数曲线分别如图4所示,输入变量的论域定为[-3,3].
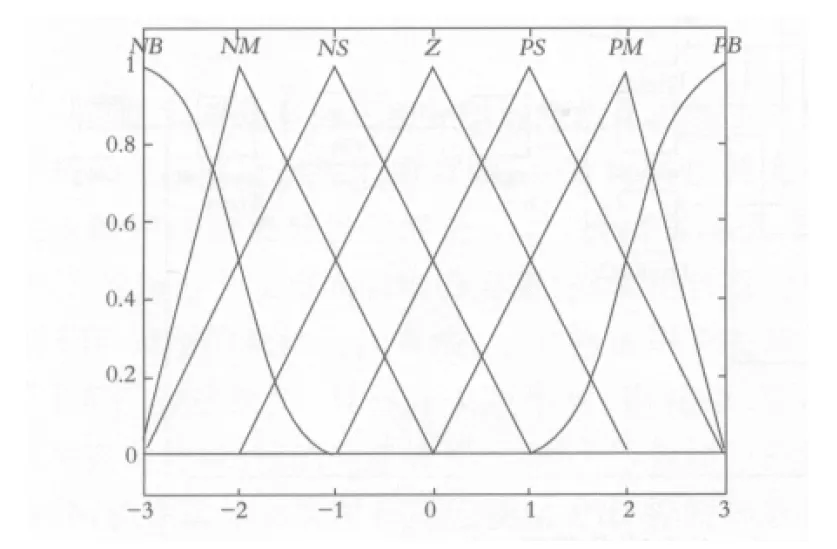
图4e、ec的隶属度函数曲线
3.2.2 模糊规则建立
模糊控制规则是根据工程设计人员长期经验的总结,建立合适的模糊规则表.根据目前我国电解行业电解槽的槽电压和电流的常规值,工程师反复调试积累的经验,得到ΔKP、ΔKi、ΔKd三个参数的整定模糊规则如表1所示.
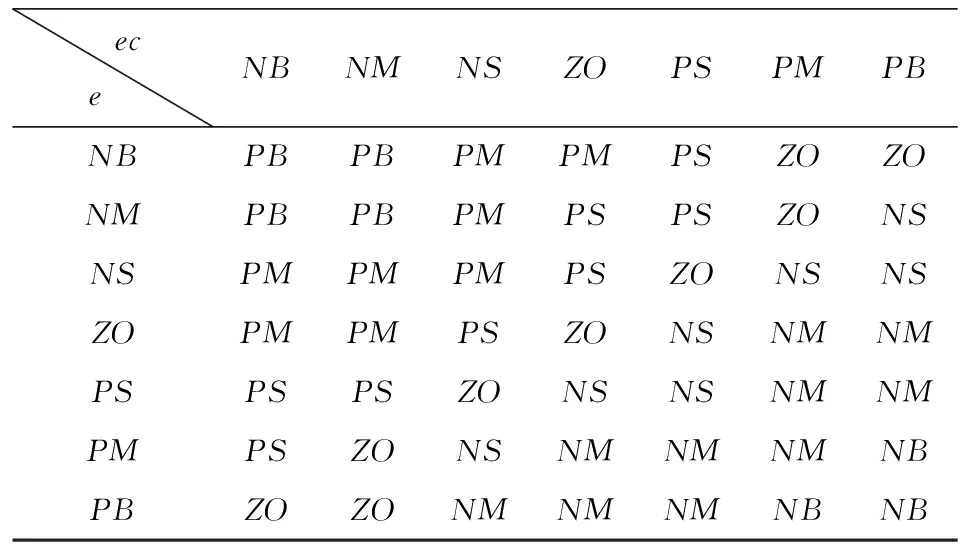
表1 ΔKP、ΔKi、ΔKd的模糊规则表
3.2.3 模糊推理及去模糊化
控制器模糊推理规则为:
ife=Aiandec=BjthenΔu=Ci
(4)
(4)式中,Ai、Bj、Ci为其论域上的语言值,可用一个Ai×Bj到Cij的模糊关系R来描述,即:
R=Uij(Ai×Bj)×Cij
(5)
根据已知的模糊量Ai和Bj,通过模糊合成运算即可求得模糊输出量Cij.
Cij=(Ai×Bj)·R
(6)
式(6)中“·”表示Max-Min推理合成算法[5].根据各模糊子集的隶属度赋值表和各参数的模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,在线修正PID参数,计算式如下:
(7)
(8)
(9)
式(7)、(8)、(9)中Kp′、Ki′、Kd′为系统的经典PID 参数,ΔKP、ΔKi、ΔKd为系统的修正参数,系统运行中模糊控制器根据模糊规则通过查表、推理和运算后,达到在线对PID参数整定[6].
3.3 自适应模糊PID核心算法设计
模糊规则制定以后,设e、ec、Kp、Ki、Kd均服从正态分布,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数ΔKp,ΔKi,ΔKd,再计算出当前的Kp、Ki、Kd参数,从而完成在线自适应校正.系统自适应模糊PID核心算法程序流程图如图5所示.
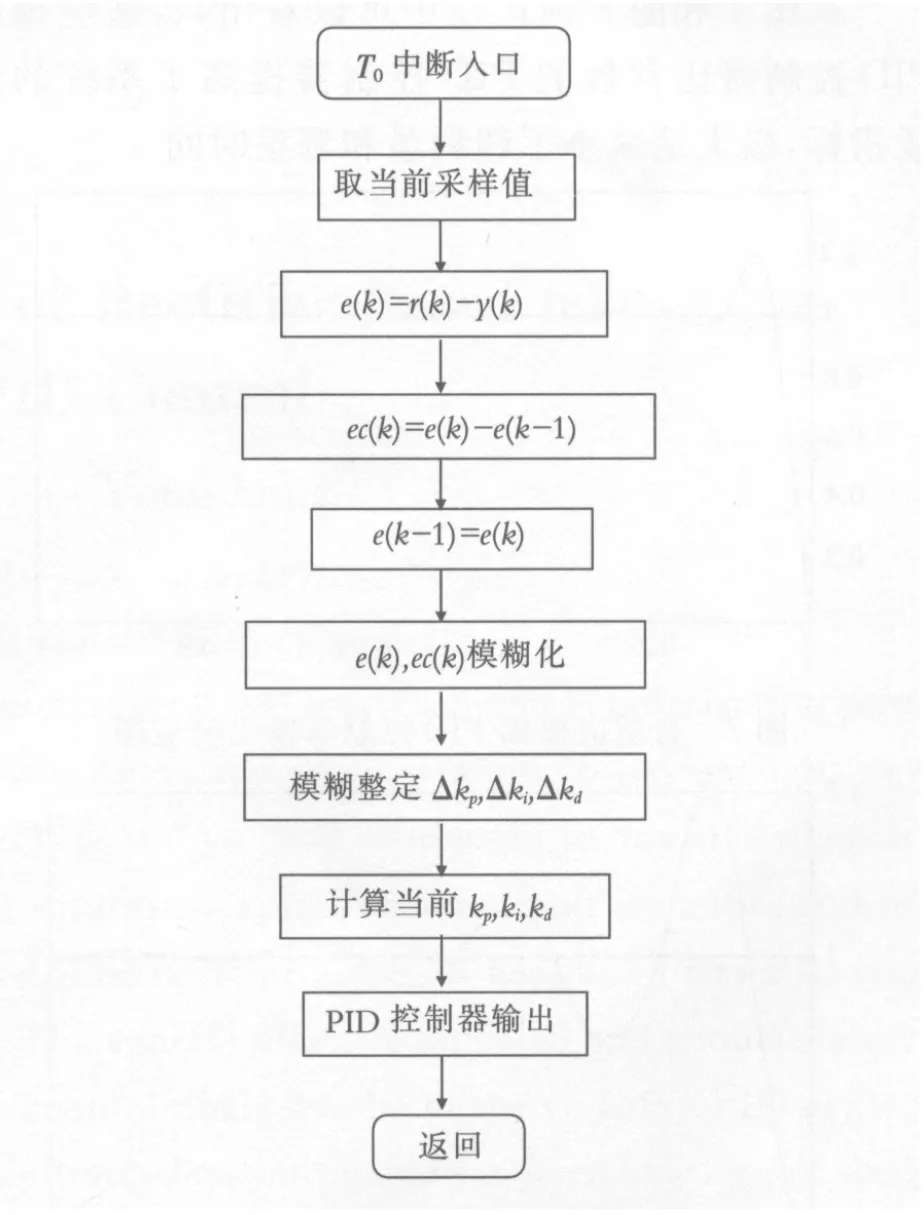
图5 自适应模糊PID核心算法程序流程图
4 仿真研究及实验分析
4.1 Simulink仿真[7]
在MATLAB/Simulink中进行仿真,设置仿真参数为:三相交流输入为380 V,平波电容Cin、C1、C2为2200 μf,电感Lin为50 mh,滤波电容C3为33 μf,开关频率12 kHz.自适应模糊PID控制器仿真模型如图6所示,常规PID控制器与自适应模糊PID控制器的输出响应比较如图7、图8所示.
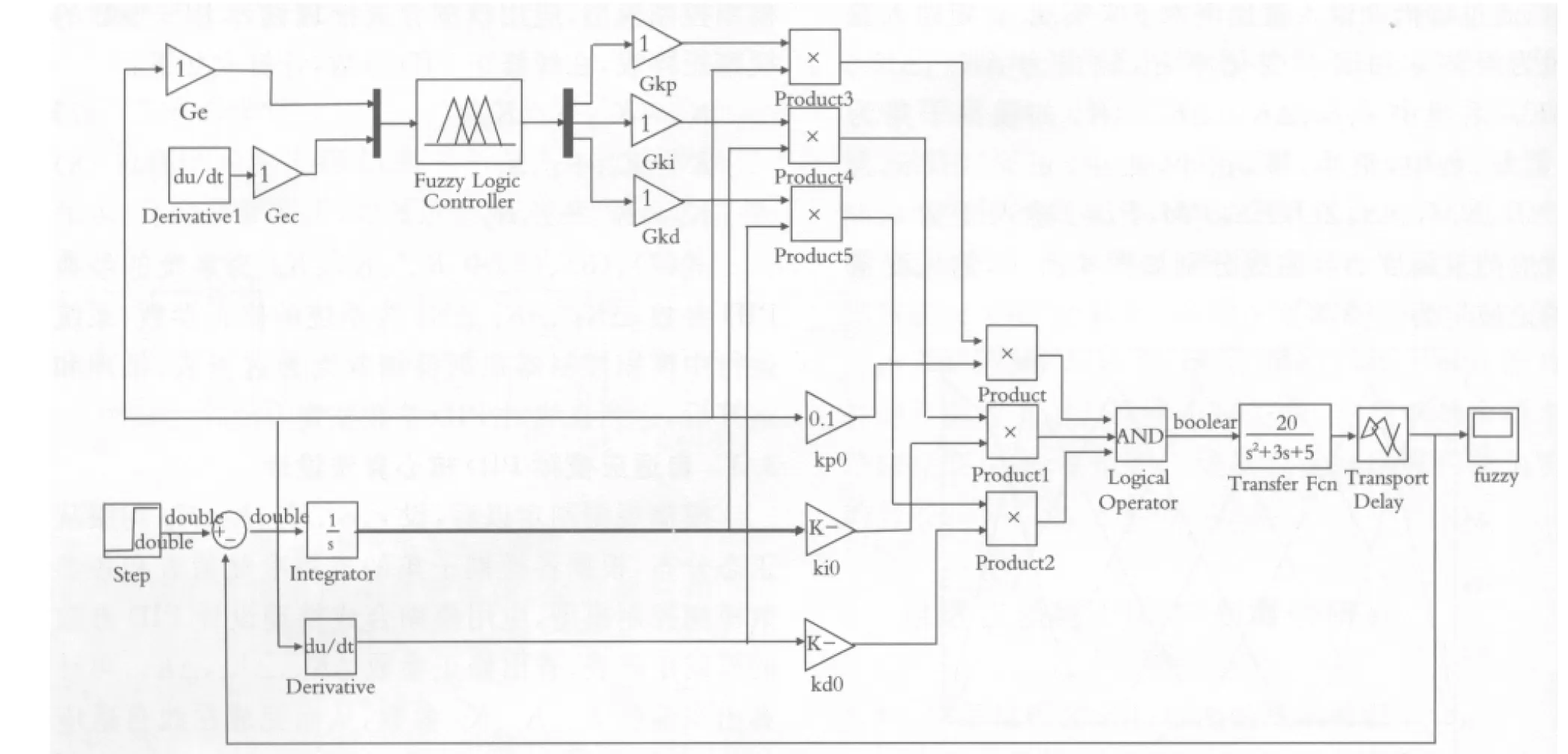
图6 模糊化后的PID控制器在Simulink 中的模型
从图7和图8的比较中可以看出,自适应模糊PID控制器比常规的PID控制器提高了系统的性能指标,极大地减小了超调量和调整时间.
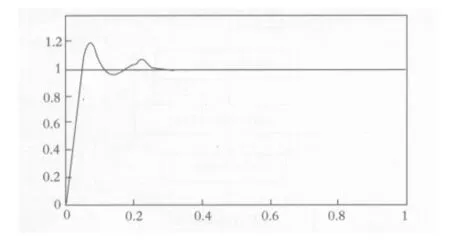
图7 自适应模糊PID控制器输出响应图

图8 常规PID控制器的输出响应图
4.2 实验对比
在极化电源实验柜上分别采用自适应模糊PID控制与常规PID控制进行的对比实验.如图9所示DSP产生的脉冲为1对互补的PWM波形;如图10所示主电路中的IGBT单相全桥逆变输出波形.
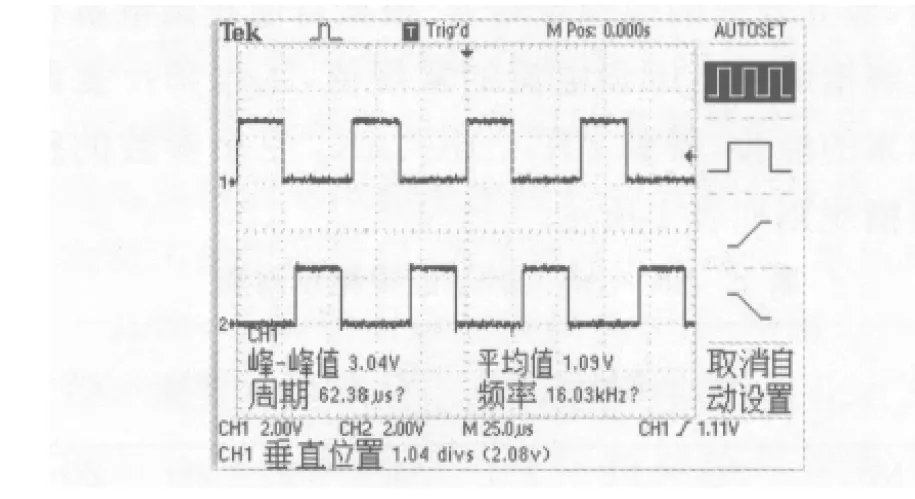
图9 输出的PWM波形
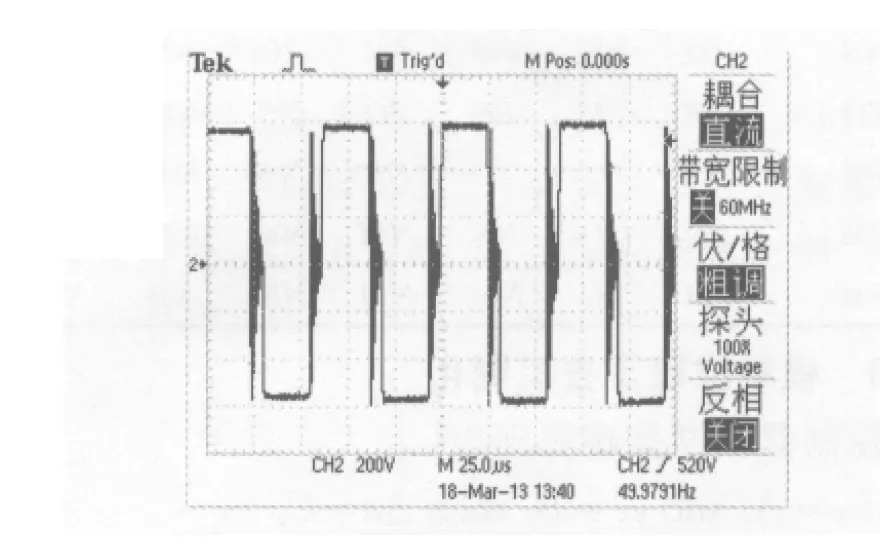
图10 IGBT单相全桥逆变输出波形
4.3 实验分析
由图7、图8可见,极化电源采用自适应模糊PID控制算法相比常规PID控制算法具有响应速度快、稳定时间短、超调量小、电源输出谐波少的特点;由图9、图10可见,采用常规PID控制器的最大超调量为15.3%,调整时间为43 s;采用自适应模糊PID控制器的最大超调量为2.4%,调整时间为27 s;即自适应模糊PID控制器比常规的PID控制器提高了系统的性能指标,极大地减小了超调量和调整时间,使PWM输出波形稳定可靠,IGBT全桥逆变输出可靠及良好的波形和参数,提高了系统的静态和动态性能点.
5 结 论
本文针对现有电化工业电解槽极化电源主电路普遍采用晶闸管相控电源方案,导致无功损耗大和注入电网的谐波分量过多的不足,提出采用交-直-交-直的新型大功率高频电源方案,并采用自适应模糊PID控制的软件设计算法.主电路选用开关器件IGBT作为逆变桥,具有开关频率高、损耗小、变流效率高的特点,控制电路选用了DSP作为核心控制器件,软件设计上采用自适应模糊PID控制的软件算法.通过仿真分析和硬件对比实验得出:该方案具有整流效率高、稳流/稳压时间短、响应速度快、超调量小、调节快速平滑、电源输出谐波少、损耗小、噪音低等特点.变流效率优于95%,功率因素优于0.98,电压、电流动态响应速度快,稳流稳压精度均优于0.5%,具有良好的应用价值.
参 考 文 献
[1] 王兆安,刘进军.电力电子技术[M].北京:机械工业出版社,2009.
[2] 旷永红,周 鹏.一种新型极化整流器的研究和设计[J].湖南工程学院学报,2012,22(4):1-4.
[3] 李 旋,张小平,尹 翔.基于自适应模糊PID控制的直流发电机组并联运行控制策略[J].仪表技术与传感器,2013(12):70-72.
[4] 梁 勇,赵莉华,张亚超,等.一种基于自适应模糊PID控制的移动电源设计[J].电源技术,2014,38(4):752-754.
[5] 周海涛,周建华,杭小宇.基于自适应模糊PID控制方法的研究[J].机械工程与自动化,2014,(3):139-141.
[6] 王贵成,汪 勇,张占胜,等.自适应模糊PID控制器的设计[J].仪器仪表学报,2008,29(4):553-555.
[7] 刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2011.
.
Design and Implementation of Rectifier Based on Adaptive Fuzzy PID Control
ZENG Xiao-bo1, KUANG Yong-hong2
(1. Hunan Vocational Institute of Technology, Xiangtan 411104, China;2.Hunan Institute of Engineering, Xiangtan 411104, China)
In view of the defects of the existing industrial electrolytic cell electrochemical polarization power main circuit which widely uses the thyristor phased rectification, the cross-straight-to pay-straight new main circuit scheme is proposed, and the adaptive fuzzy PID control method is adopted to improve the software design. In this paper, the design of the power system solutions, system main circuit structure and the working principle and control circuit analysis are elaborated.The basic principle of adaptive fuzzy PID control method and the software implementation are studied, The control effect is modeled and simulat is carried out.Conventional PID control algorithm for the experimental analysis,the adaptive fuzzy PID control algorithm has fast response, less overshoot and short stable time, less output power harmonic, good static and dynamic performance. It has good application value.
adaptive fuzzy PID; polarization power; rectifier;DSP; simulation
2015-04-05
湖南省教育厅科学研究项目(12C1097).
曾小波(1979- ),男,硕士,讲师,研究方向:电力电子技术、嵌入式技术.
TP273.4
A
1671-119X(2015)03-0013-05
