汽车自主驾驶碰撞试验的控制系统设计
2015-03-01方遒杨福清俞剑斌
方遒, 杨福清, 俞剑斌
(1. 厦门理工学院 机械与汽车工程学院, 福建 厦门 361024;
2. 厦门理工学院 福建省客车先进设计与制造重点实验室, 福建 厦门 361024)
汽车自主驾驶碰撞试验的控制系统设计
方遒1,2, 杨福清1, 俞剑斌1
(1. 厦门理工学院 机械与汽车工程学院, 福建 厦门 361024;
2. 厦门理工学院 福建省客车先进设计与制造重点实验室, 福建 厦门 361024)
摘要:为降低汽车研发过程的碰撞试验成本和缩短研发周期,对无牵引装置的汽车正面碰撞试验进行系统研究,论述正面碰撞试验车自主控制系统的设计.根据C-NCAP碰撞试验法规,对车辆进行了行进方向和行车速度控制的实车试验.结果表明:试验车行进方向与纵向中心线的重合度最大正负偏差分别为+95 mm和-105 mm,在汽车碰撞试验法规规定范围±150 mm内,车速快速提高到64 km·h-1后,系统仍能够保证汽车直线稳速行驶,满足现有试验法规的基本要求,具有实用性和推广价值.
关键词:汽车; 控制系统; 无人驾驶; 碰撞试验; 驱动机构
随着汽车安全法规的日趋严格,整车厂对汽车安全性日益重视,汽车安全性试验也不断提高,汽车智能化试验研究成为重点之一.无人驾驶汽车是汽车智能化的一种体现,国内外对其开展了很多方面的研究工作.目前,无人驾驶汽车得到快速发展,但将其应用到汽车碰撞试验中甚少.根据GB 11551-2003《乘用车正面碰撞的乘员保护》、GB/T 20913-2007《乘用车正面偏置碰撞的乘员保护》等标准的技术要求,汽车碰撞试验车通常通过交直流电机或液压马达牵引丝绳,利用地面上导轨进行车辆导向.牵引机构比较复杂,一般只适用于室内试验,需投入昂贵的试验场建设费用[1].目前,国内只有几家大型的试验场和汽车厂才具备碰撞试验的条件,而且极少人实现任意角度的碰撞试验;再者碰撞前碰撞车辆与钢丝绳脱钩后处于自由状态,无法准确控制碰撞车速,存在碰撞临界车速的闪差.因此,本文提出一种无人驾驶汽车碰撞试验控制系统的设计,包括横向控制机构和纵向控制机构设计,经过反复的实车试验验证,满足现有碰撞法规的基本要求.
1试验方法
利用无人驾驶的汽车碰撞试验方法主要有如下6个步骤.
步骤1选择一块开阔平地以便进行碰撞试验(如室外水泥地面).
步骤2按碰撞试验标准预设固定壁障.
步骤3在试验车(含台车)的行进方向的中心线设一条黑色标识线,使得该中心线与拟被碰的壁障或车辆形成相应碰撞试验所需要的角度,如图1所示.图1中:α为行进方向与固定壁障的夹角.

图1 汽车碰撞方案示意图Fig.1 Schematic diagram of the vehicle collision scheme
步骤4利用无人驾驶技术,对试验车进行改造,使得试验车能自主进行车辆的横向(前进方向)控制和纵向(车速)控制.改造对象主要包括对转向盘、加速踏板、制动踏板、离合器踏板等.
步骤5在试验车上按标准规定安装试验假人、线束电缆及设备,包括能识别行进方向中心线的前置传感器、后置传感器、无人驾驶控制器、紧急情况处理器等,并进行接线如图2,3所示.
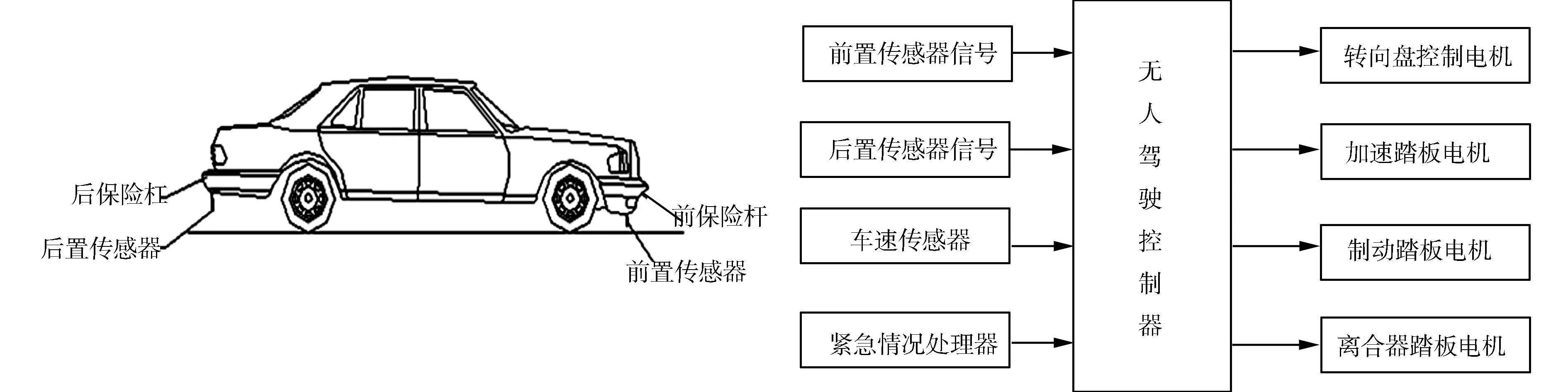
图2 前、后置传感器安装位置示意图 图3 无人驾驶控制器接线示意图Fig.2 Schematic diagram of front and rear Fig.3 Schematic diagram of unmanned sensors installation location controller connection
步骤6在行进方向中心线的起点,发动准备好的试验车,驾驶状态设定为无人驾驶,拨好起始档位,起动已设定好碰撞速度的无人驾驶控制器、紧急情况处理器,就可以开始进行碰撞试验.
2横向控制机构设计
横向控制是在导向标识的引导下,通过车载传感器检测道路信号,经控制器处理分析,从而控制车辆的转向盘转动,使车辆能够自动行驶在预定的车道上.通过检测车辆相对于期望行驶轨迹的偏移量,根据一定的数学模型计算出车辆转向盘转角的大小和方向,使车辆按照正面碰撞试验预定的直线轨迹行驶.利用光电检测来识别黑色标识线,信号通过红外滤波放大后送入无人驾驶控制器MCU(micro controller unit),经过偏移量以及偏移历程的辨识,再经过模糊PID(proportion integration differentiation)控制算法得出控制指令.该指令对步进电机进行转向控制,步进电机通过减速齿轮机构传递到试验车的转向盘上,并不断地修正行驶路径,使试验车无需牵引装置实现车道保持的动态实时控制[2].控制系统结构,如图4所示.
2.1 传感器选择
根据《乘用车正面碰撞的乘员保护》的技术要求,正面碰撞试验车偏离理论中心线的偏差不得超过±150 mm.碰撞试验车设计要求是样车沿着预设轨道直线行驶,更重要的是如何尽可能快且准确地检测到轨道,从而修正前轮的转向.行驶轨道一般采用黑白[3]两种鲜明对比颜色的材料,采用整体式红外光电传感器,可靠性好,易于实现.为提高传感器组的测量精度,在每个光电传感器上加装黑色塑胶套管[4],从而避免相邻光源和太阳光的的干扰.
2.2 车载传感器分布和控制原理
车载传感器的分布对试验车行进方向的线性度和试验结果将产生很大的影响,如图5所示.在试验车的前保险杠和后保险杆中心对称轴上分别安装一组车载红外光电式传感器,每组有5个传感器,其安装位置离保险杆最前端或最后端至少要100 mm,减少碰撞时传感器对车辆碰撞试验结果的影响.试验准备过程中,应将试验车摆正放置,前后传感器组的中心一个传感器应照射到黑线中心,无人驾驶控制器对传感器输出信号进行判断,计算车辆的横向偏差量.
为试验车往左偏,前置传感器C和D输出低电平信号,此时需调整转向电机使行驶方向往右旋转一定的角度,再实时调整试验车行驶方向.为提高这种仿人控制模型[5]横向控制精度,根据试验上的前后传感器组相对于黑色胶带中心线的位置计算出车辆行驶的航向角[6].航向角表明:车辆横向运动的趋势作为控制模型的输入量,明显改善整车横向控制的滞后性.
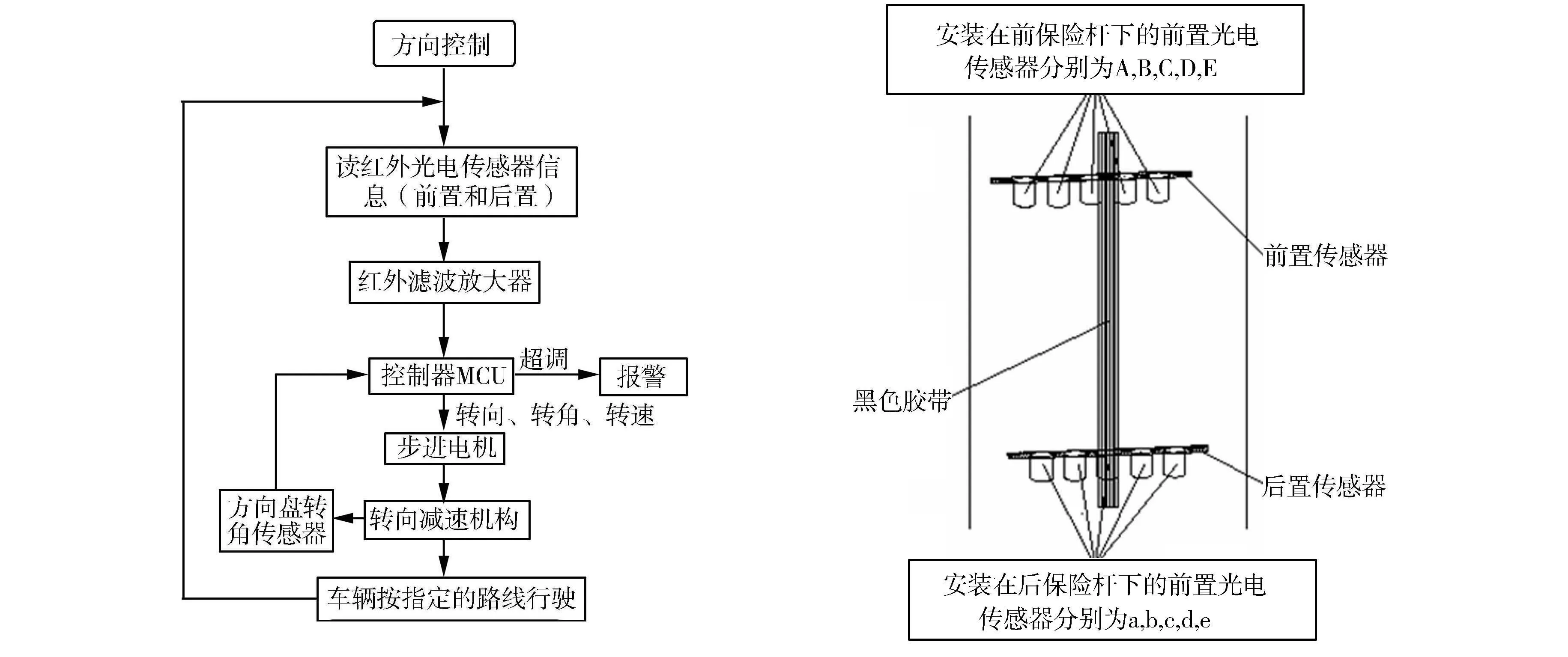
图4 控制系统流程图 图5 车载传感器分布示意图 Fig.4 Flow chart of control system Fig.5 Schematic diagram of on-board sensors distribution
充分利用前横向偏差和航向角这2个输入量,引入模糊PID控制模型来替代仿人控制模型,建立基于PID控制的数学模型,对步进电机的转动量进行控制.由于车辆驾驶系统中的计算机控制是一种随机采样控制,软件只能够根据采样时刻的输入偏差值计算出输出控制量,因而对应的积分和微分环节需要做离散化处理.因此,整车横向控制PID模型的控制规律为

(1)
式(1)中:e(k)为控制模型的偏差输入量;KP,KI,KD分别为输入量的比例、积分和微分系数[7].
由式(1)可得前横向偏差控制量ue和航向角控制量ua.设经过实验得到的ue的控制权值为ke,a,ua的权值为1-ke,a, 则可以得到PID控制模型给出的总控制量为

(2)
根据阿克曼转向几何原理,通过汽车转向盘转角可以计算出汽车行驶转弯半径.无人驾驶控制器根据减速齿轮的传动比等因素对车辆偏差总控制量进行计算分析.发出指令给转向步进电机进行转向控制,通过反馈,实时地检测和调整试验车的行驶路径.针对试验车转向的瞬态响应特性,不同的工况(正、反转和制动)可采用不同的步进电机换向时序、控制目标和运动方程.采用混杂切换原理[8]设计其控制系统.以转角跟踪性能为控制目标,以车速为影响因子,车速具有时变、滞后等特性.考虑到碰撞试验控制精度要求,建立合理的隶属函数和恰当的模糊控制规则表,再将去模糊化得出查询表控制转向盘转向、转速及转角.通过模糊PID控制参数,加快系统响应过程的同时消除静态误差,提高控制精度.
3纵向控制机构设计
试验车的纵向控制系统包括加速踏板、制动踏板和离合器踏板(对手动挡车而言),通过无人驾驶控制器来协调控制车速.
由于试验车在碰撞试验时,驾驶员座椅上需要放置试验假人、线束电缆及设备,对纵向控制机构安装提出严格的要求,性能指标如下:1) 结构简单,能够安装在狭小的空间内;2) 安装通用性好,适合于不同行程和结构尺寸的踏板机构;3) 运动控制简单可靠,定位精度高,运动速度可灵活调整.因此,采用步进电机驱动加速踏板、制动踏板和离合器踏.加速踏板驱动机构,如图6所示.
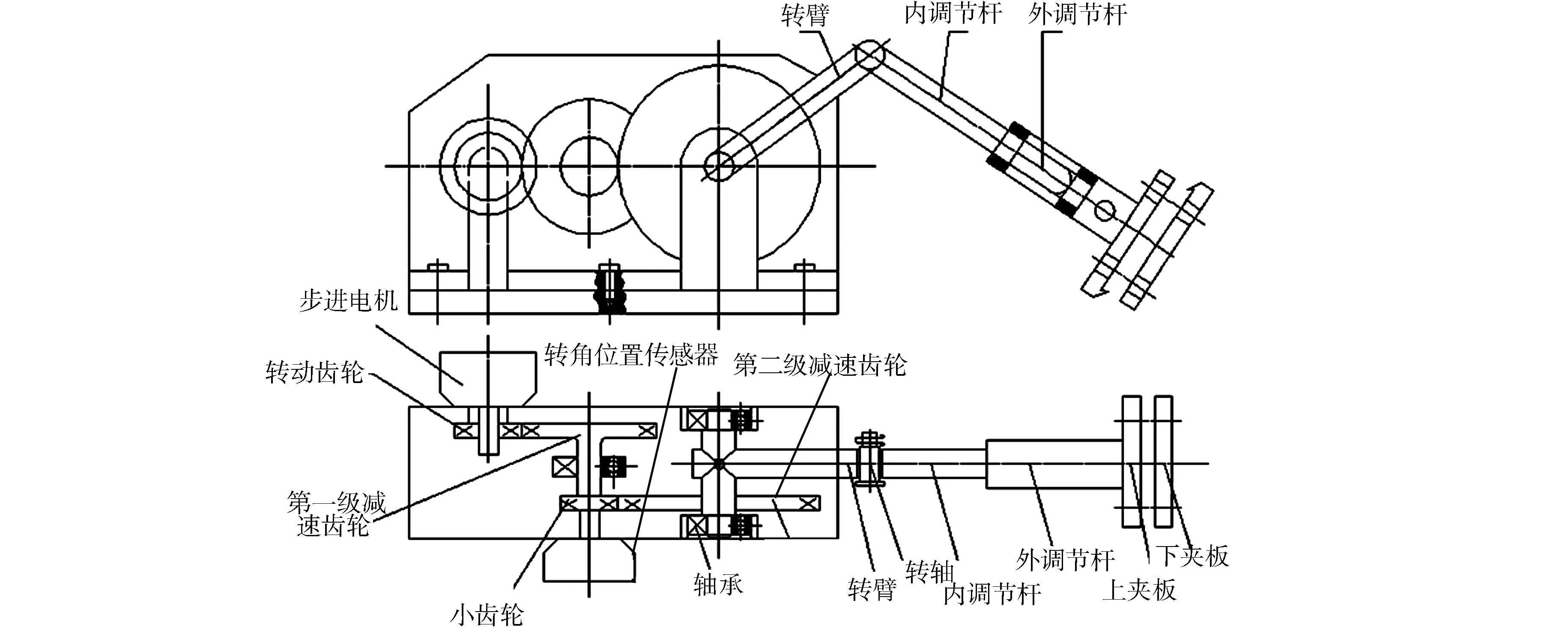
图6 加速踏板驱动机构示意图Fig.6 Schematic diagram of accelerator pedal driving mechanism
在步进电机输出轴上固定一个转动齿轮,它与第一级减速齿轮啮合,传递扭矩并减速,第一级减速齿轮和和小齿轮在同一个惰轮轴上,小齿轮与第二级减速齿轮啮合,进一步减速增矩,并通过转角传感器实时拾取踏板的实际位置.转臂通过销钉与第二级减速齿轮轴固定,另外一端通过转轴与内调节杆铰接,内调节杆上有外螺纹,外调节杆有内螺纹,依据加速踏板上步进电机的最大运动行程决定预调长度.当踏板踩到最大踏板力时,转臂与内调节杆的角度接近直角.转臂的长度乘以转过的角度的正弦值、再与转臂和内调节杆的夹角的正弦值的乘积,近似为车辆踏板的行程.步进电机通过齿轮、转臂、转轴和内外调节杆构成的一个二力杆[9],将旋转运动变成踏板的下压和回收动作,此机构具有类似驾驶员的脚踝关节一样的柔性,能满足不同踏板尺寸的试验车型.
在试验车碰撞控制系统中,为精确定位碰撞临界车速,需要能够对试验车的制动踏板或离合器踏板进行智能控制.对于制动踏板驱动机构,要求能够方便调节制动力,保证控制精度;对于离合器踏板驱动装置,要求具有下压运动速度快,分离彻底,回收速度可方便调节的特点.制动踏板或离合器踏板驱动机构,如图7所示.采用直线型步进电机通过拉索滑轮机构驱动踏板能方便调节踏板位置,满足制动踏板或离合器踏板的控制要求.
如果试验车的变速器是自动档的,在开始试验前,试验人员启动发动机并处于怠速状态,放开手刹装置,摆正试验车的车身后,将排挡杆拨到D档,而车辆转向则通过步进电机控制回正且制动转向盘.对于试验车转向的瞬态响应控制在±2°,由于永磁步进电机采用永久性磁铁,即使定子绕组断电也能保持一定力矩,从而制止方向盘转动.
对于手动挡汽车而言,自动换挡驱动机构,如图8所示.橡胶套环包住挂档把手上,通过选档机构和换挡机构支撑.内层选档机构上采用伺服电机通过螺纹传动的方式进行选档操作,而螺牙端部是橡胶套环的支架,通过拉动挂档把手左右移动进行选档.在选档过程中,为了防止选档机构的晃动,选档支架左边采用二个光滑轴套进行导向,但需保证支架不会发生脱节并稳定传输动力;对于换挡控制也采用类似的驱动机构,但考虑到挂档与摘档的力矩较大,换档伺服电机最大扭矩比选档电机大,整个换挡支架通过螺栓连接固定在试验车排档杆座上.
图7 制动踏板或离合器踏板驱动机构示意图 图8 自动换挡驱动机构示意图 Fig.7 Schematic diagram of brake pedal Fig.8 Schematic diagram of automatic or clutch pedal driving mechanism shift drive mechanism
当要求试验速度ua=64 km·h-1[10],加速度du/dt≤0.3时,试验车加速距离S≥53.75 m才可满足加速要求.考虑到各车型发动机动力性能的差异,加速距离可放宽至150 m,车辆稳速距离控制在50 m以上.此时,必须切断发动机动力,且松开制动踏板,压下离合器踏板,挂到空档,确保汽车处于完全自由状态撞击目标物.因此,为保证试验的准确性和安全性,整个试验跑道应设计在200 m以上.
4试验车速的控制

为了降低试验成本,避免无效的试验碰撞,对试验车实施车速风险控制.通过无人驾驶控制器利用无线射频技术,将车速信号发射到紧急情况处理器上,实时显示车辆的运行状态;也可通过紧急情况处理器,人为微量调节车速,精确地控制试验车速.若试验车因动力系统、控制系统等原因在临近固定壁障时都无法达到试验车速时,紧急情况处理器将发射一个横向控制信号给无人驾驶控制器,发出指令给转向驱动电机.在试验场上适当地调整转向,只需试验车避开与固定壁障即可,同时将制动踏板机构处于下压状态,这样可避免无意义地进行碰撞试验,防止发生车辆侧翻等危险,提高试验的可控性.
5实车试验
与现有汽车碰撞方法相比,汽车自主驾驶进行碰撞试验更加符合现实路况的实车碰撞,模拟碰撞现场的重发生,各项性能指标如表1所示.为尽量缩小与试验法规的要求,同时又能体现车辆正面碰撞的安全性、真实性和客观性,室外水平运动跑道的直线长度达到200 m以上,风速≤5 m·s-1,采用起亚千里马自动挡试验车模拟直线行驶.为减小试验成本,暂不考虑与固定壁障碰撞.经过反复的模拟试验,不断地调试控制电机的脉冲频率和个数,最终达到试验法规加速要求.试验结果表明:试验车的纵向中心线与黑色胶带中心线重合度最大偏差分别为+95 mm和-105 mm,车速加速到正面碰撞规定车速64 km·h-1后,仍能稳速直线行驶.因此,此方案可满足碰撞试验法规的要求.

表1 系统方案与碰撞试验法规要求对比
6结束语
利用无人驾驶试验车模拟碰撞车辆,替代传统碰撞试验台上复杂的牵引装置,能够实现车与固定壁障之间和车与车之间任意角度的碰撞试验.试验场的选取可在室内或宽阔的室外进行,这可以大大降低汽车厂在汽车研制过程中的碰撞试验成本,缩短整车的开发周期,同时也适合于社会公益机构或鉴定机构(如汽车召回中心、司法鉴定、技术鉴定等)对汽车碰撞试验的要求,对于整车厂及零部件生产企业具有一定的实用性和推广价值.
参考文献:
[1]张金换,杜慧良,马春生,等.汽车碰撞安全性设计[M].北京:清华大学出版社,2010:38-41.
[2]吴超仲,王春燕,杨利兵,等.智能公路系统车道保持模糊控制研究[J].公路交通科技,2002,19(2):131-133.
[3]冯笑笑,胡佳娟,吴偏偏,等.红外光电传感器的性能分析与应用[J].苏州大学学报:工科版,2012,32(1):11-14.
[4]王伟,陈慧,刁增祥,等.基于光电导航无人驾驶电动汽车自动寻迹控制系统研究[J].汽车工程,2008,30(2):137-140.
[5]童厚健,吴超仲,吴青,等.基于磁道钉导航的车辆自动驾驶模型的优化设计[J].武汉理工大学学报:交通科学与工程版,2005,29(5):675-677.
[6]姜勇,解晓琳.汽车自动驾驶的方向与车速控制算法设计[J].科学技术与工程,2013,13(34):10213-10220.
[7]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2003:1-30.
[8]罗石,杨钢,朱长顺,等.车辆瞬态响应试验中转向机器人混杂控制研究[J].车辆与动力技术,2012,4(128):12-15.
[9]陈晓冰.基于驾驶机器人的室内汽车排放耐久性试验系统的研究与工程实现[D].南京:东南大学,2005:48-63.
[10]中国汽车技术研究中心.C-NCAP管理规则[S].北京:中国标准出版社,2012:80-90.
(责任编辑: 陈志贤 英文审校: 杨建红)
Control System Design for Crash Tests of Self-Driving Car
FANG Qiu1,2, YANG Fu-qing1, YU Jian-bin1
(1. College of Mechanical and Auto Engineering, Xiamen University of Technology, Xiamen 361024, China;
2. Automobile Key Laboratory of Advanced Design and Manufacture in Fujian Province,
Xiamen University of Technology, Xiamen 361024, China)
Abstract:In order to reduce the vehicle cost crash test and shorten the development cycle in vehicle research process, in this paper, a towingless vehicle frontal crash test is systematically studied and the autonomous control system is discussed as well. According to C-NCAP crash test standards, travelling direction control experiment and travelling speed control experiment were carried out on the vehicle. Test results indicate that, the maximum positive and negative deviations of the contact ratio between test car travelling direction and longitudinal center line are +95 mm and -105 mm respectively,which are within the range of ± 150 mm stipulated by car crash test regulations. Meanwhile the system is still able to ensure the test car driving 64 km·h-1, which meets the basicrequirements of existing test regulations and possesses practical and popular value of the system.
Keywords:automobile; controlling system; driverless; crash test; drive mechanism
基金项目:国家自然科学基金资助项目(51305374); 福建省科技计划重点项目(2013I0008)
通信作者:方遒(1967-),男,副教授,博士,主要从事汽车安全与电子控制技术的研究.E-mail:fangq@xmut.edu.cn.
收稿日期:2014-09-10
中图分类号:U 467.1
文献标志码:A
doi:10.11830/ISSN.1000-5013.2015.01.0001
文章编号:1000-5013(2015)01-0001-06
