计算机仿真在电机及电力拖动教学中的应用
2015-02-28丁方莉焦俊生
丁方莉 焦俊生
(铜陵学院,安徽 铜陵 244000)
计算机仿真在电机及电力拖动教学中的应用
丁方莉 焦俊生
(铜陵学院,安徽 铜陵 244000)
电机及电力拖动技术是自动化、电气工程专业重要的专业基础课程,该课程内容多,理论教学内容抽象难懂,学生学习过程中普遍感觉理解困难。为了提高电机及拖动的学习效果,采用仿真教学,以三相交流异步电动机正反转为例,对正反转过程做了仿真分析,在学习过程中,可任意改变运行参数来观察结果,有助学生理解,从而收到了事半功倍的效果。
电机;拖动;仿真;正反转
一、引言
电机及电力拖动技术是自动化、电气工程及其自动化、电力电子及电力传动等专业的重要的专业基础课,该课程主要讲述变压器、交流异步电机、同步电机、直流电机及控制电机的原理及应用,培养学生分析问题和解决实际问题的能力,它是后续电力电子技术、交流调速系统等课程的基础。该课程具有理论性强、概念抽象复杂、难以理解的特点,是电气工程类专业较难教学的课程之一。学生学习本课程后,普遍感觉对该课程理解不深,概念较为模糊,为了更好地探讨该课程的教学改革,加深学生对抽象问题的理解,提高学生的学习兴趣,本文通过电机正反转实例,阐述仿真教学在电机与电力拖动教学中的应用。
借助计算机仿真技术,可以弥补实验器材缺乏的不足,减少过多的实验耗材,根据目前电机及电力拖动教学情况,电机及拖动实验室器件较少,满足不了本课程所有的实验教学,利用MATLAB仿真技术,可以完成电气及拖动真实实验难以完成的任务,学生还可以优化实验对象,增强在学习交流机、直流机、同步电动机学习过程中对复杂磁路的理解,提高学习兴趣,取得课程教学较好的效果。
MATLAB由Jack Little在1984年推出商用版,学术版早在1984年就由新墨西哥大学Cleve Moler教授用于线性代数、数值计算、矩阵理论等课程的教学。MATLAB语言和其它语言比较起来,如C++,Fortran等在程序编写及可视化方面,使用上更加方便,对初学者来说,一学就会,容易上手[1]。它的主要特点在于提供许多库存函数指令工具箱,具有Simulink视觉图形化互动系统模拟环境,使繁杂的运算变得简单等特点。目前,已广泛应用于数学、工程、物理、化学、电气工程等领域。目前,国内外大学教材更将其纳入问题求解模拟的工具软件。
二、教学过程
1.三相异步电动机正反转的理论教学过程
以三相异步电动机正反转作为教学示例,工作原理如图1所示[2]。
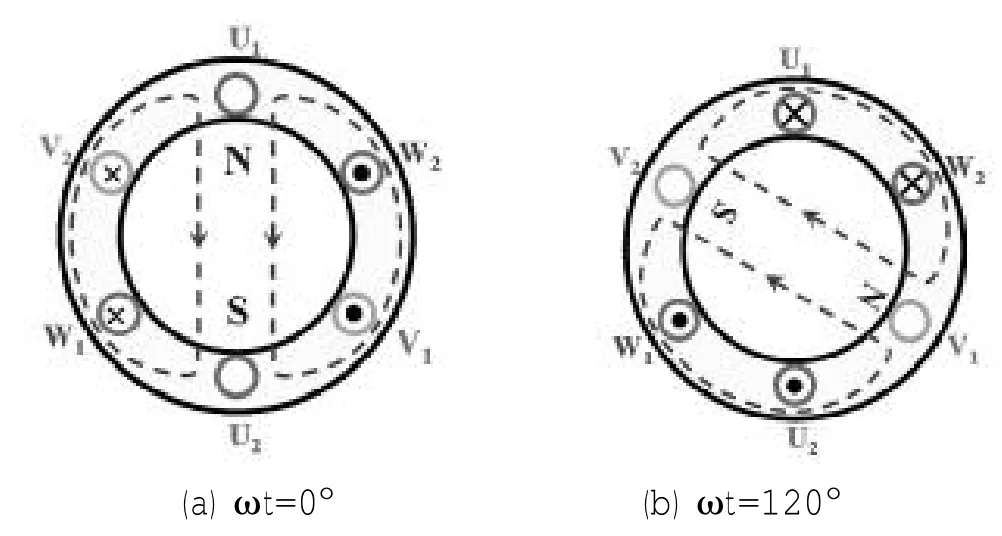
图1 二极旋转磁场
我们知道,对称三相绕组通入对称三相电流,三相交流电能产生旋转磁场,磁感线切割转子绕组,转子绕组中产生e和i,转子绕组在磁场中受到电磁力的作用,产生电磁转矩,转子旋转起来。三相异步电动机要旋转起来的先决条件是具有一个旋转磁场,三相异步电动机的定子绕组就是用来产生旋转磁场的[2]。
如图1所示,U1U2、V1V2、W1W2中通入的电流分别是i1=Imsinωt,i2=Imsin(ωt-120°),i3=Imsin(ωt+120°)。当ωt=0度时,i1=0,U1U2绕组中没有电流;i2<0,实际方向与参考方向相反相成,即从末端V2流入,用“×”表示,从首端V1流出,用“·”表示;i3>0,实际方向与参考方向相同,即从首端W1流入,从末端W2流出,根据右手螺旋定则,它们产生的合成磁场的方向如图中虚线所示,是一个二极磁场,即一对磁场,上面的磁感应线穿出铁心,为N极,下面的磁感应线进入铁心,为S极。
当ωt=120度时,i1>0,即从首端U1流入,从末端U2流出;i2=0,V1V2绕组中没有电流;i3<0,即从末端W2流入,从首端W1流出。它们产生的合成磁场的方向如图1所示,仍是二极磁场,但合成磁场的位置已顺时针旋转了120度。同理还可继续得到其他时刻的合成磁场,从而证明了合成磁场在空间是旋转的。
旋转磁场的旋转方向与绕组中电流的相序有关。相序U、V、W顺时针排列,磁场顺时针方向旋转,若把三根电源线中的任意两根对调,例如将V相电流通入W相绕组中,W相电流通入V相绕组中,则相序变为:W、V、U,则磁场必然逆时针方向旋转。利用这一特性我们可很方便地改变三相电动机的旋转方向。
2.仿真教学分析
三相交流异步电动机在实际运行时,学生对它的正反转电磁特性理解不深,为了让学生更好地掌握交电电动机的运行特性,采用软件仿真的方法可以让学生形象、直观地观察电动机正反转的特性,可以反复修改参数,既不存在损坏实际设备的问题,而且也能达到良好的实验教学效果。
如图2所示,使用Simulink电力系统SimPower-Systems仿真模块,选取适当的电力电子器件模型搭建主电路,在Simulink模型窗口,选择3个单相交流电压源(AC Voltage Source)、电压测量(Voltage Measurement)、异步电机(Asynchronous Machine)、示波器(Scope)、集线器(Demux)等模型,按图2进行连接,建立仿真模型。仿真时把3个单相交流电压源的幅值设置为311V,初相位分别设置为0°、120°、-120°,异步电机设置为鼠笼型(Squirrel-cage)。
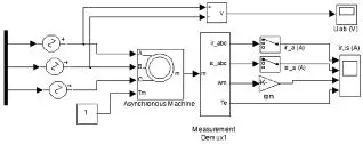
图2 三相交流异步电动机正反转仿真框图
三、仿真结果分析
三相交流异步电动机正转仿真结果如图3所示,电磁转矩瞬间变为正值,经过振荡过程,逐渐变为零。

图3 三相交流异步电动机正转仿真波形图
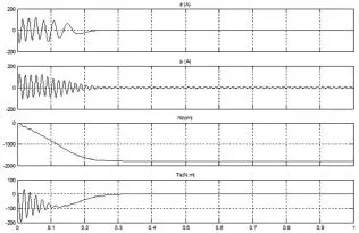
图4 三相交流异步电动机反转仿真波形图
在图2中,改变电源相序,模型重新开始运行后,反转仿真图如图4所示,电磁转矩瞬间变成负值,经过渡过程,逐渐趋近于零。
教学中发现,有部分同学认为负载转矩始终是负转矩,侧电磁转矩应与负载转矩相反,其值应该为正值,其实是一种误解。电机改变状态前,我们可以假设转向为顺时针,这样得到负载转矩逆时针,电磁转矩顺时针,也就是电磁转矩T>0,是正值,负载转矩TL< 0,为负值,电动机状态改变以后,电磁转矩首先改变方向,即变为T<0,而此时电机转向来不及变化,仍然为顺时针,负载转矩继续为TL<0,故电动机转速迅速减小到零,这个过程中电磁转矩与负载转矩都是小于零,同方向[3]。然后,电动机改变方向为逆时针,与电磁转矩同方向,而负载转矩则变成顺时针方向,一直到电动机进入持续的稳定运行状态。
四、结论
计算机仿真提供独特的学习环境,它允许学习者自由控制学习环境,透过良好的可操作模块软件,学习者可轻易改变模块的起始状态,使其成为预定状态,这些软件接受学习者的命令后,即刻改变模块组合形态,并在适当时机将新的组合结果显现出来。当操作实物具有危险性或建立真实情境需时耗力时,那么此方式特别适合采用计算机仿真教学。在计算机仿真环境下,计算机快速地建立各种真实情境,让学习者在极短时间内安全地操纵并经历这些情境。
因此,适当的运用MATLAB软件作为辅助工具,已成为电气工程及其自动化、自动化专业学生不可缺少的学习课程及方向技能,而由本文所提供的例题与解题过程来看,MATLAB软件确实适用于对电机及拖动中的交直流电机起动、反转、制动运行的分析与模拟。学习者可看到运行动态变化行为,补偿理论学习的抽象难懂之处,强化具体的学习效果。
[1]张志涌,徐彦.Matlab教程(7.0版本)[M].北京:北京航空航天大学出版社,2005.
[2]唐介.电机与拖动[M].北京:高等教育出版社,2007.
[3]潘晓晟,郝世勇.Matlab电机仿真精华50例[M].北京:电子工业出版社,2007.
Ding Fang-li,Jiao Jun-sheng
(Tongling University,Tongling Anhui 244000,China)
Application of Computer Simulation in Motor and Driving Course
Motor and driving is important professional foundation course of the automation,electrical engineering.Students feel learning difficulties because of its more course content and theoretical teaching.In order to improve the learning effect of motor and driving,the author applies the simulation teaching using positive and negative rotation of three-phase alternating current asynchronous motor.The paper analyzes simulation results of positive and negative rotation,the learning process can be changed by operation parameters arbitrarily.The method is useful for motor and driving courses teaching.
motor;driving;simulation;positive and negative rotation
G642
A
1672-0547(2015)04-0119-03
2015-07-25
丁方莉(1969-),女,安徽淮北人,铜陵学院电气工程学院高级实验师,研究方向:电工电子。
铜陵学院教学研究项目(JY12026)。
