基于实验教学的物联网教育机器人设计与应用
2015-02-27葛艳红李文锋周建荣姚道金
葛艳红,李文锋,周建荣,姚道金
(1.武汉理工大学 物流工程学院,武汉 430070; 2.东莞市博思电子数码科技有限公司,广东 东莞 523000)
基于实验教学的物联网教育机器人设计与应用
葛艳红1,李文锋1,周建荣2,姚道金1
(1.武汉理工大学 物流工程学院,武汉 430070; 2.东莞市博思电子数码科技有限公司,广东 东莞 523000)
机器人教育的需要以及机器人本身所蕴含的教育价值,使得机器人被广泛地用作多种实验、实践的教学平台。物联网技术的兴起、物联网基础设施的建设和综合应用,为机器人教育和工程创新平台的搭建开辟了新渠道。文中针对高校以机器人为对象的实践平台,以及机器人和物联网专门研究的需要,开展了物联网教育机器人的功能需求分析和设计,并以所开发的物联网教育机器人模拟物理车辆,对停车场进行了实际场景的模拟再现和智能化管理实验。
物联网;教育机器人;创新平台;实践教学
机器人学已成为一个多学科交叉的新兴学科,其核心是智能技术,外延则涵盖了机械、电子、通信、控制、生物等多个学科和技术领域,具有高度的渗透性、创新性和实践性,蕴含着丰富的教育元素。机器人在教育领域的应用表现出了无可比拟的教育价值和发展前景,其多学科交叉融合的特性为培养宽口径、高素质、复合型的工程人才提供了一个良好的平台[1-3]。物联网的出现和快速发展为机器人教育和教育机器人研究提供了强有力的技术支持和环境支持[4],物联网教育机器人在这样的背景下应运而生。在教育机器人中引入物联网元素,不仅扩展了机器人的功能性、智能性和趣味性,更拓展了学生的创新思维空间,提高了创新积极性。
1 物联网教育机器人定义及功能分析
教育机器人是以激发学生学习兴趣、培养综合能力为目标的机器人产品。将物联网元素引入机器人系统,使教育机器人功能更强大,具有自主控制、智能传感与标识、无线传输、分布式协同、智能交互等特点。这一类新型的具有物联网理念的教育机器人,被称为“物联网教育机器人”[5]。物联网教育机器人不仅拓宽了教育机器人的功能,也拓展了物联网的应用。学生可以根据自己的需求,利用物联网教育机器人产品所提供的主控制器、无线射频识别(radio frequency identification,RFID)模块、无线传感器网络节点以及驱动模块等,方便地搭建自己的机器人和物联网实验场景,构建分布式控制与协同实验平台、物流与交通实验平台等,从而更好地理解物联网和机器人及其工程应用,满足物联网和机器人教育的需求,提升学生的知识应用能力、工程实践能力。
物联网教育机器人是一类新型的具有物联网理念的教育机器人,主要是为教育服务,有别于工业/军用机器人。两者的主要区别见表1。
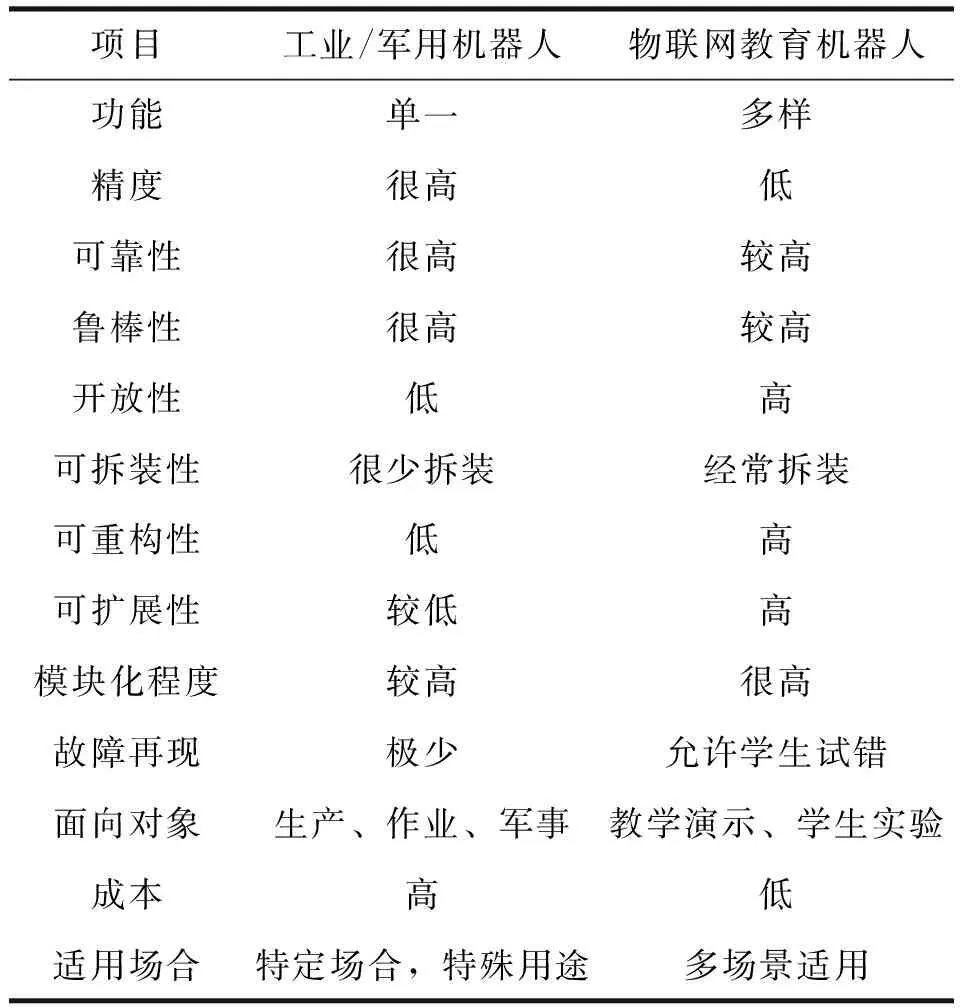
表1 物联网教育机器人与工业/军用机器人的区别
工业/军用机器人一般用于特定的场合,完成特殊的用途,所以功能相对单一,但是对精度、可靠性、鲁棒性的要求很高,不允许轻易出现故障,所以制造成本高,但对开放性和可重构性要求不高。物联网教育机器人正好相反,对精度、可靠性、鲁棒性的要求不是太高,但是却要求很好的开放性、扩展性和可编程性,以便能让学生进行二次开发,动手动脑。同时要求多场景适应性,能不同组合构建不同用途机器人实体,满足不同方面的实验需要。物联网教育机器人最大的特点是允许故障再现,允许学生试错,甚至可以人为制造故障以便通过实验反证正确的理论和方法。
本文设计的物联网教育机器人主要应用对象为工科大学生和研究生,目的是为他们提供知识应用、学科融合、实验验证、动手动脑的实验平台,在实验、实践过程中理解物联网、机器人等相关技术的理念和内涵。因此开发设计并研究的移动式物联网教育机器人,希望体现以下八个方面的教育功能。
1.1 展现物联网的内涵
“物联网”的概念已经被炒得如火如荼,但究竟什么是物联网,物联网包含哪些关键技术,学生们依然是一头雾水。因此我们设计的机器人以及它的相关研究旨在体现物联网的概念、内涵、技术架构以及应用。移动机器人可以作为物联网中的一个移动智能终端。
1.2 机器人的技术普及
机器人从最初的专有军事应用,到如今广泛应用于工农业,甚至已经步入寻常百姓家,机器人技术已经无处不在。因此机器人技术的普及和推广是时代所需,这也正是我们开发设计教育机器人的目的之一。
1.3 多种硬件设备的展示
机器人包含很多硬件设施和设备,如机械结构体、驱动单元、传感装置、控制系统等。在我们所设计的机器人平台上可以充分展示这些硬件的功能和工作原理,并且可以通过实验优化这些硬件设备,以此帮助学生理解这些硬件的各项性能。
1.4 嵌入式操作系统的学习
现在的移动机器人大多为嵌入式机器人。随着嵌入式操作系统的快速发展,嵌入式操作系统比较丰富、成熟,且大多源码开放,所以学生可以借此学习、移植嵌入式系统,并进行实验验证。
1.5 多种控制原理的实验验证
控制系统是移动机器人的核心,决定着机器人的整体性能。除了硬件本身的因素外,不同的控制方法直接决定着控制效果。在本文所设计的机器人平台上可以进行各种控制原理和方法的实验验证和对比分析。
1.6 与其他技术的聚合应用
机器人技术可以和其他多种技术聚合应用,以拓展机器人的功能。将无线传感器网络(wireless sensor network,WSN)和RFID作为机器人的高级传感器,一方面可以大大扩展机器人的感知范围和能力,与环境的交互更加具体和详细;另一方面,也为WSN和RFID提供了新的应用环境和领域。
1.7 培养程序设计能力
在搭建好的机器人软硬件平台上,通过多种方法和途径编写符合协议规范的应用程序控制机器人,验证程序的可行性和可靠性,锻炼程序设计能力。
1.8 多种教学应用
该教学移动机器人除了为学生提供多种实践平台以外,也可供教师课堂教学时现场演示、示范之用。
2 物联网教育机器人设计
物联网教育机器人设计包含四个方面:机器人机械结构设计,主控制器和传感器模块化设计,物联网应用模块设计以及系统软件设计。在此不做机械结构的专门设计和研究,只是用一些特质的塑料接插件拼装成能够承载和容纳其他所需器件的基本体即可。
2.1 主控器设计
控制系统是移动机器人的核心,负责对感知识别层生成的大量信息进行管理、处理、决策,对外提供服务。同时根据处理的数据结果或系统命令完成目标任务,或反作用于环境。在该模块的设计中应主要解决数据如何存储、如何检索、如何使用、如何不被滥用等问题。
本文所设计的物联网教育机器人需要较高的工作频率、较快的处理速度、具有多种数据通信接口以及丰富的扩展接口,为此设计了一个具有双层架构的移动机器人控制系统,整体结构如图1所示。
主控制器采用基于ARM9内核的32位控制器,其较强的处理能力能保障控制算法的有效执行;从控制器采用8位AVR单片机,用于收集机器人的传感信息并实现机器人的运动控制。这种分级控制架构有效缓解了由于多中断源频繁中断给主控制模块带来的压力(传感器数据丢失,底层程序执行周期过长,系统延迟等),明显加快机器人的反应能力,提高了机器人运行的稳定性。由于控制器为主从式双层架构,因此其资源较单MCU架构更丰富,大大增强了控制系统的处理速度和扩展能力。
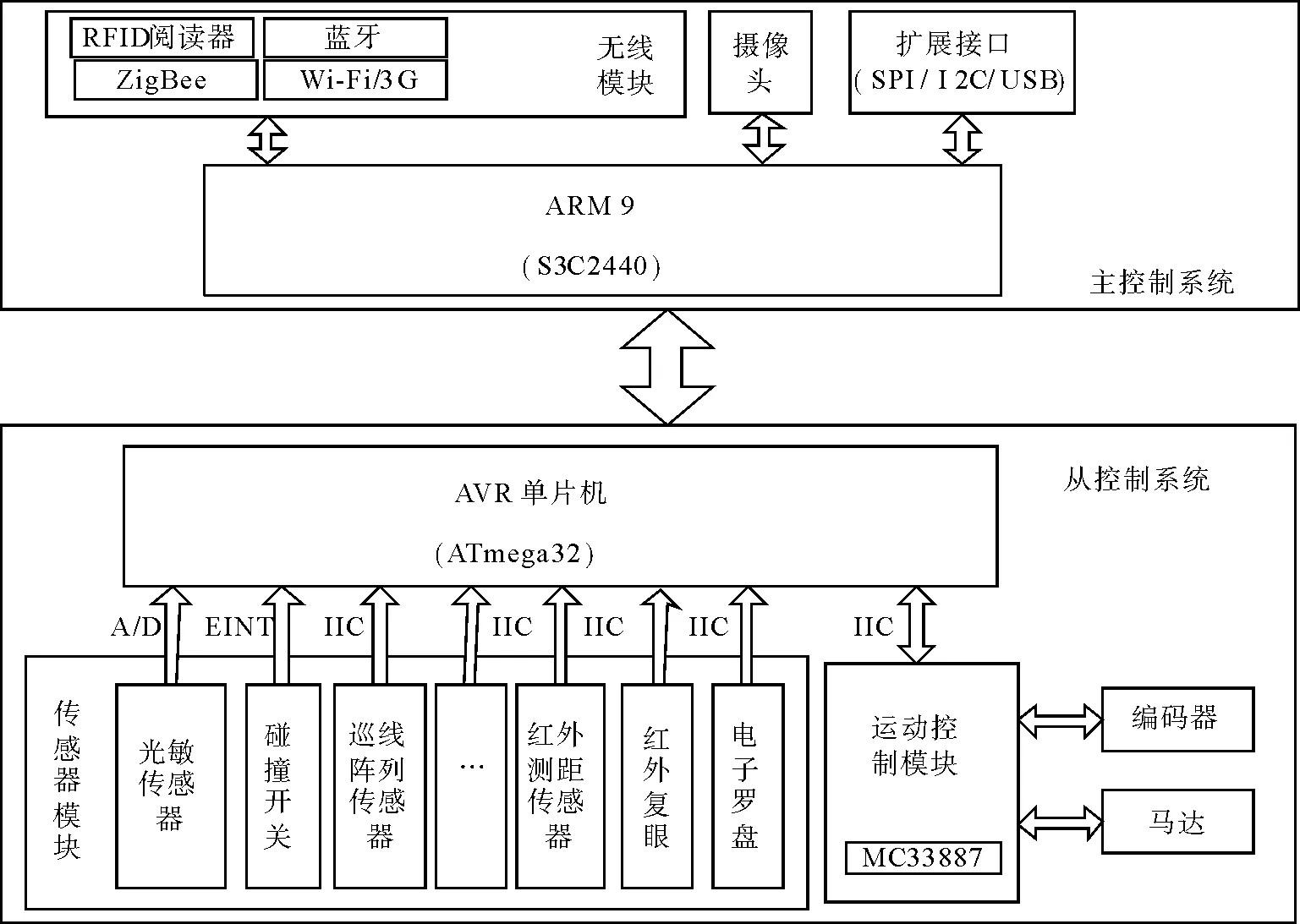
图1 控制系统整体结构示意图
2.2 传感器模块化设计
模块化设计是指通过对一定范围内的不同功能或相同功能但不同性能、规格的产品进行功能的分析,再划分并设计出一系列功能模块,使用的时候,通过增减模块数量或模块的不同排列组合形成不同的产品,以满足多元化的需求。
传感器模块是机器人的“五官”,根据需要可以选择性安装,即插即用。本文针对物联网教育机器人的需要,设计了多种检测传感器和驱动器,如巡线阵列传感器、红外复眼传感器、红外测距传感器、电子罗盘、高功率电机驱动器等。将这些传感器和驱动器进行模块化设计,一方面,增强了它们的通用性;另一方面,可以方便随时拆装与组合以适应不同的任务需求。每个模块设计有标准的I2C总线协议接口、UART串口等多种通用数据接口,使模块有很好的兼容性。
2.3 物联网单元模块开发
物联网单元模块主要有RFID模块、WSN模块、蓝牙通信模块、Wi-Fi模块等。这些模块主要实现机器人的网络功能、机器人之间的信息交互、机器人和环境之间的信息交互、机器人与上位机的信息交互。机器人的网络功能通过Wi-Fi、3G等实现;而信息交互则通过WSN节点、RFID或蓝牙实现,如图2所示。
2.4 通信协议设计与开发
物联网教育机器人涉及的通信主要包括:机器人控制器与物联网模块的通信,以及物联网模块之
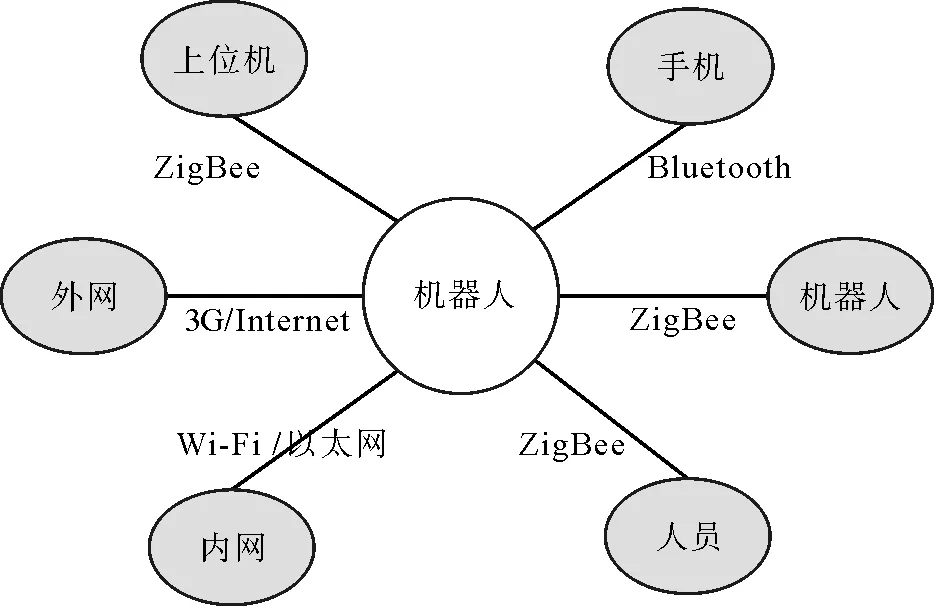
图2 机器人通信模式
间的通信,见表2。首先,要设计稳定、灵活、鲁棒性强的通信协议,确定各模块间的通信接口,使之能自由组合;然后,根据设计的协议,开发机器人控制器底层驱动程序和各模块上的通信接口程序。具体的通信协议(自制协议)在此略。
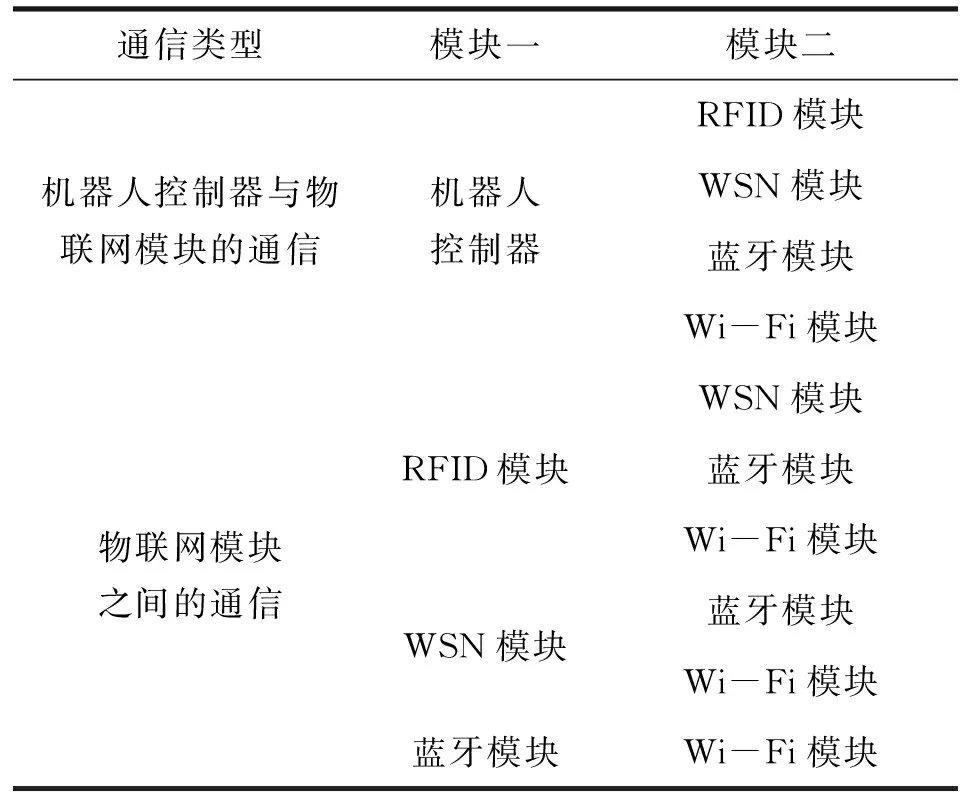
表2 模块通信列表
2.5 系统界面设计
为了实现机器人的远程可编程控制,本系统设计了一个基于socket连接的机器人网络控制服务器。远程用户根据该服务器的接口定义,编写基于socket连接的控制程序,远程下载至机器人控制器,实现对机器人的自主控制,完成期望的任务。
考虑到目前Internet网上的网络用户多使用Windows系统,为了方便用户使用,我们开发设计了PC机Windows系统下的客户控制平台界面,用户远程控制机器人时要填入移动机器人服务的ID,客户端会自动连接相应编号的机器人服务器。
3 物联网教育机器人实验案例——智能停车场模拟实验
该实验是利用机器人模拟现实中的运动物体(车辆),实现情景再现,为实际场景教学、大型复杂工作或生活环境预研提供浓缩版模型,如大型停车场的车位和车辆管理、物流公司的车辆调度等。
搭建机器人小车和“迷你”停车场如图3所示。两个机器人代表两辆车辆,笔记本电脑代表停车场信息管理系统。机器人车辆携带电子标签、WSN节点和避障传感器。机器人车辆到达停车场入口处时,标签被门禁RFID阅读器读取、识别,将车辆信息送入信息管理系统,管理系统按照就近原则分配空位给车辆机器人,并在系统中实时显示。机器人收到指令后依次进入各自的车位。
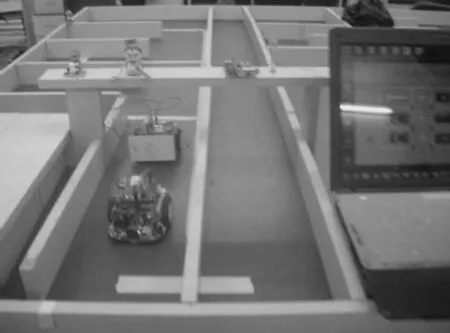
图3 多机器人模拟车辆出入车库实验
实验结果显示,无线通信确保了机器人之间以及机器人与管理系统之间的“连接”和信息交流;避障传感器避免了机器人相互之间以及机器人与周围“建筑”的碰撞并保持一定的距离;RFID使得机器人与停车场信息管理系统建立了联系。实验很好地体现了机器人之间的相互感知与通信,以及RFID、WSN等物联网关键技术的综合应用。实验不足之处:1)机器人数量有限,群体复杂性体现不够充分;2)停车场信息管理系统指定空位给机器人需要有电子导航功能和相关设备的支持,目前还不能广泛普及。
4 结束语
机器人教育离不开机器人平台,工程应用教学离不开实体平台。机器人本身具有的学科综合性、交叉性、创新性已得到师生的广泛认同,将物联网元素引入教育机器人,构建以机器人技术和物联网技术为依托的物联网教育机器人平台,不仅可以开展机器人和物联网的教育和研究,开展工科学生的创新能力训练和培养,更是机器人技术和物联网技术集成应用的有益探索。
[1]王成军,沈豫浙.开展机器人教育 培养创新能力[J].中国地质教育,2010(1):109-111.
[2]LI Nan,PHAN Tung,TOURETZKY Dave S, et al. Creating an educational robot by embedding a learning agent in the physical world[C]// USA SIGCSE '13 Proceeding of the 44th ACM technical symposium on Computer science education[S.l.]:New York:2013:759-760.
[3] MCLURKIN J, RYKOWSKI J, JOHN M, et al.Using multi-robot systems for engineering education: teaching and outreach with large numbers of an advanced, low-cost robot[J]. IEEE Transactions on Education, 2013,56(1):24-33.
[4]张春红,裘晓峰,夏海轮,等.物联网技术与应用[M].北京:人民邮电出版社,2011.
[5]葛艳红.基于物联网的教育机器人关键技术研究[D].武汉:武汉理工大学,2013.
Design and Application of IOT Educational RobotsBased on Experimental Teaching
GE Yanhong1, LI Wenfeng1, ZHOU Jianrong2, YAO Daojin1
(1.School of Logistics Engineering,Wuhan University of Technology,Wuhan 430063,China;2.Dongguan BDS Technology Limited,Dongguan 523000,China)
As the demand of robotics education and the value of educational robot contains, it makes the robot widely used in a variety of experiment and practice teaching platform. The rise of IOT (Internet of Things) technology and the construction of IOT infrastructure and integrated applications, pave the way to build a robot platform for robotics education and engineering innovation. This paper focuses on robotics experimental platform in the university and the demand of research of robot and IOT, to design the educational robot based on IOT according to the functional requirements that be analyzed. Finally, the educational robot based on IOT is used to simulate the physics vehicle, to act the real scene of the parking lot and some intelligent management experiments.
internet of things;educational robots;innovation platform;practice teaching
2014-12-16;修改日期:2015-06-04
湖北省国际合作项目(2011BFA012)。
葛艳红(1968-),女,博士,副教授,主要从事物联网与机器人技术、Web技术与虚拟现实方面的研究。
Adoi:10.3969/j.issn.1672-4550.2015.06.007
